标注
文件操作
检测点
lua
No space
磁盘已满
dither
lua __newindex
节日
MIT
秒掉
数码管
neo4j
猿创征文
ECDSA
前端3d物理引擎
换源
购书网站
osg
集成测试
无人机
2024/4/11 15:01:32
(02)Cartographer源码无死角解析-(10) 配置文件加载1→主体框架分析LoadOptions()
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …

阿木实验室普罗米修斯项目环境配置
引言
普罗米修斯项目其实只是个大ROS功能包, 里面每个模块就是每个ROS功能包,比如控制模块,视觉模块等等。对PX4配置的与这个一样,另外他是使用自己的P系列无人机(我个人是P450),所…
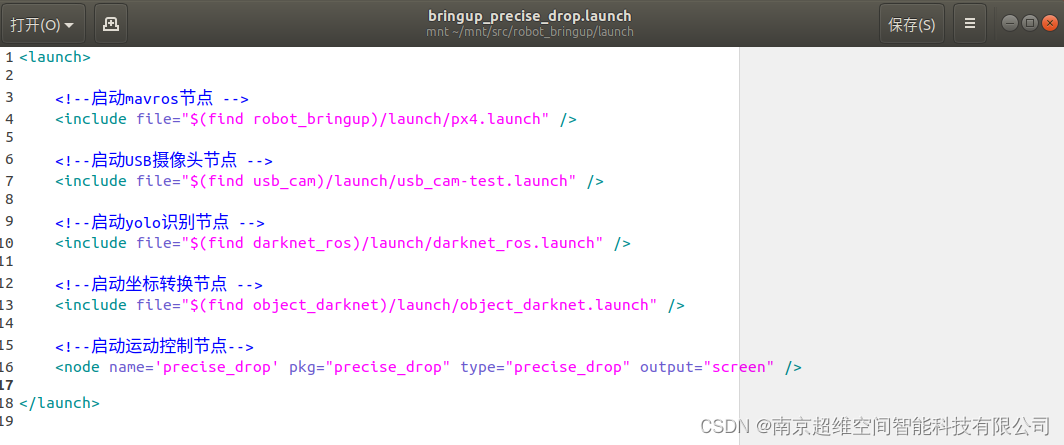
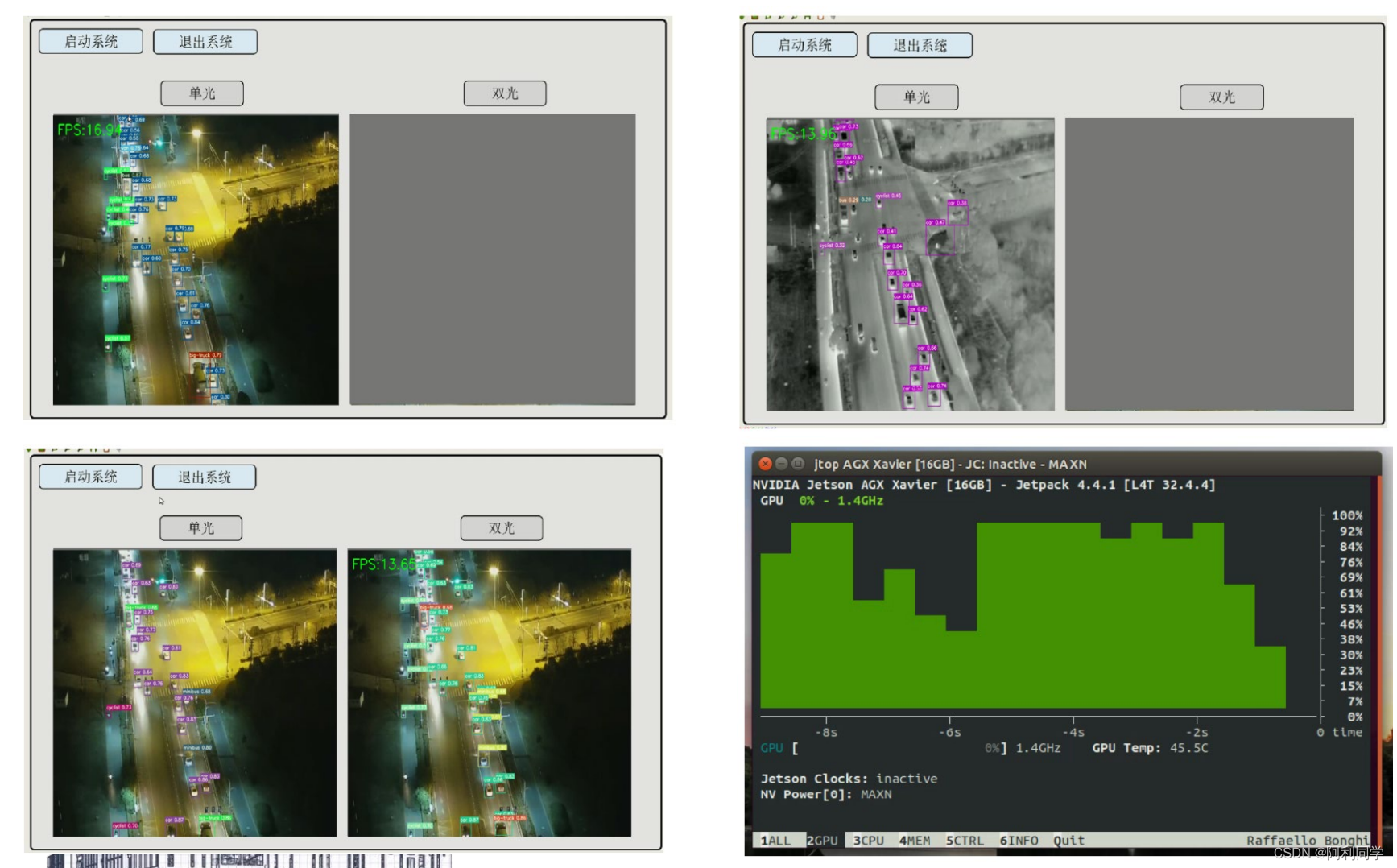
超维空间M1无人机使用说明书——61、ROS无人机yolo识别与投放
引言:使用yolo进行物体识别,根据返回的目标位置信息,控制无人机全向移动,当无人机到达目标物的正上方,满足一定的误差阈值后,ROS发布控制控制将舵机挂载的物体抛下,紧接着无人机前往起飞点上方寻…
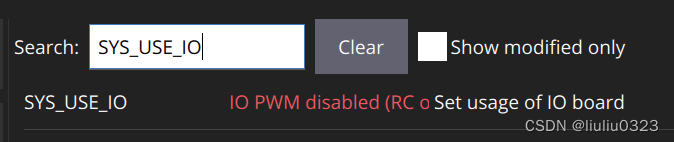
【飞控调试】无人机电调哔-哔-哔-哔-哔...发出急促的响声
硬件
飞控:Pixhawk 6C mini 电调:好盈hobbywing Platinum 40A 固件:PX4 V1.13.3
问题
电调上电后,电机发出哔-哔-哔-哔-哔…发出急促的响声,进行电调校准也没用。
解决
在QGC里把SYS_USE_IO参数改成Disabled&…

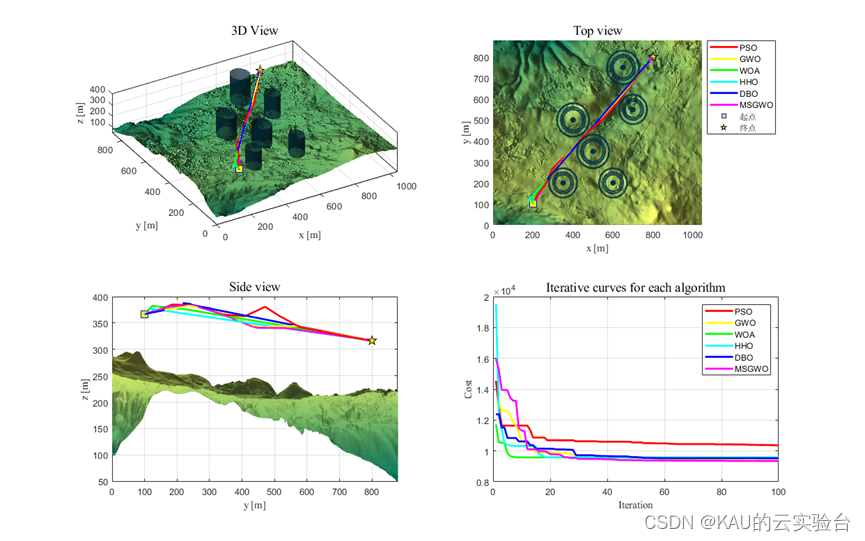
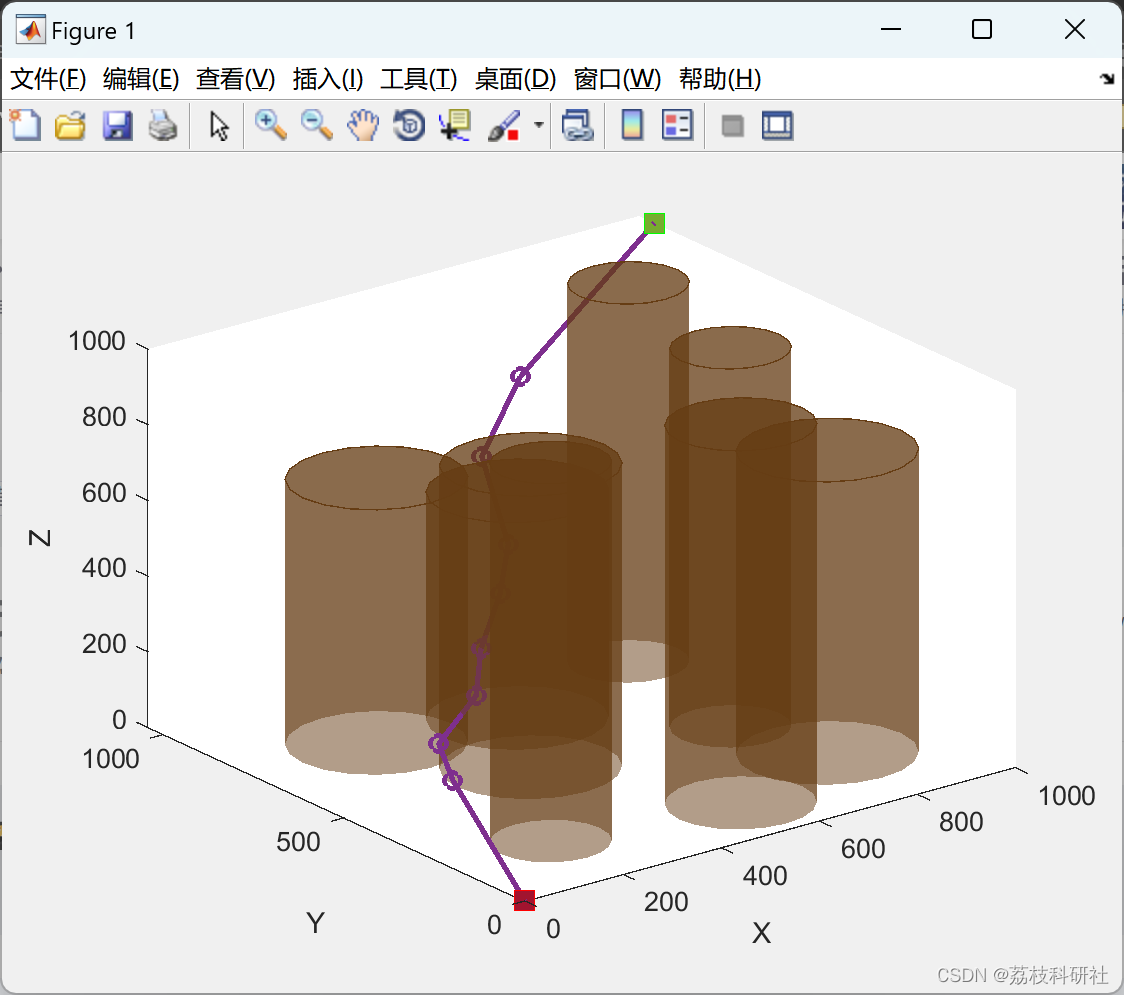
基于和声算法的无人机航迹规划-附代码
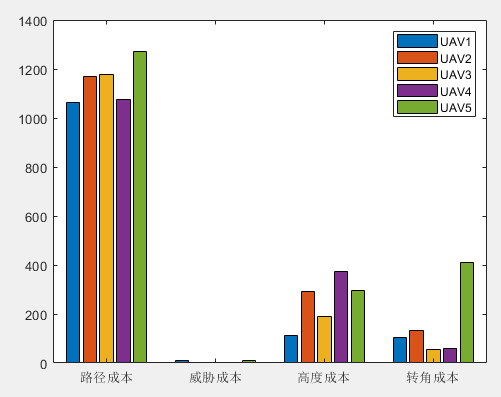
基于和声算法的无人机航迹规划 文章目录 基于和声算法的无人机航迹规划1.和声搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用和声算法来优化无人机航迹规划。 1.和声搜索算法
…

高效、精准、安全:无人机自主巡检助推电力应用大升级
在江苏某变电站运检中心,工作人员启动了无人机自主巡检平台,开始无人机自主巡检任务。巡检管控中心的大屏实时显示无人机自主巡检的飞行轨迹和相关信息,全方位监控设备的安全状态。 一、复亚智能助推变电站数字化转型
江苏某变电站作为连接多…
无人机航拍高度与地面采样距离
无人机航拍高度与地面采样距离
1.无人机航拍高度与地面采样距离的关系
为搞清无人机航拍高度与地面采样距离的关系,首先需要了解像素与像元之间的细小差别(个人理解)。像素偏重于图片描述,也就是常说的一张图片像素是多少。像元…
STM32无人机-四轴四元数姿态解算与卡尔曼滤波
四轴四元数姿态解算
MPU6050是一种非常流行的空间运动传感器芯片,可以获取器件当前的三个加速度分量和三个旋转角速度。 什么是四元数 这部分很难,新手知道四元数的功能是将 6 轴传感器数据转化为三轴姿态角度数据即可。
四元数解算程序店家已经封装成…

基于蝠鲼觅食算法的无人机航迹规划-附代码
基于蝠鲼觅食算法的无人机航迹规划 文章目录 基于蝠鲼觅食算法的无人机航迹规划1.蝠鲼觅食搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用蝠鲼觅食算法来优化无人机航迹规划。 …
(01)ORB-SLAM2源码无死角解析-(40) EPnP 算法原理详解→理论基础四:QR分解(豪斯霍尔德Householder变换)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方中心提供了本人 联系…
(01)ORB-SLAM2源码无死角解析-(38) EPnP 算法原理详解→理论基础二:分情况求得beta初始解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/de…

基于热交换算法的无人机航迹规划-附代码
基于热交换算法的无人机航迹规划 文章目录 基于热交换算法的无人机航迹规划1.热交换搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用热交换算法来优化无人机航迹规划。 1.热交换…

空中消防员:无人机森林防火应用全面升级
森林是生态系统的重要组成部分,也是人类得以生存的关键。我国森林面积广大,存在火灾频发的困境。提升森林火灾防控能力是维护生态平衡、保护资源和保障人民生命安全的必要步骤。随着无人机技术的发展,其在无人机森林防火中的应用为传统巡查工…

典型的无人机打击技术
无人机打击技术主要指的是用于中和、摧毁或干扰无人机(UAV)的各种技术手段。 这些技术随着无人机的广泛使用而迅速发展,特别是在军事和安全领域。下面是一些主要的无人机打击技术及其原理: 射频干扰(RF Jamming&#x…

电子眼与无人机在城市安防中的协同应用研究
随着城市化进程的快速推进,城市安全问题成为了人们关注的焦点。传统的安防手段已经无法满足现代城市复杂多变的安全需求。因此,结合电子眼与无人机技术,实现二者之间的协同应用,成为提升城市安防能力的重要途径。 一、电子眼与无人…

基于野狗算法的无人机航迹规划-附代码
基于野狗算法的无人机航迹规划 文章目录 基于野狗算法的无人机航迹规划1.野狗搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用野狗算法来优化无人机航迹规划。 1.野狗搜索算法
…

硬核加码!星邦蓝助力全球运力最大固体火箭“引力一号”海上首飞
继助力我国最大固体运载火箭“力箭一号”首飞后,星邦蓝再次有幸参与和见证了全球运力最大的固体火箭“引力一号”首次成功发射。
今日,全球运力最大的固体火箭“引力一号”从山东海阳附近海域完成首次发射,刷新世界最大固体运载火箭纪录&…
AR增强现实在无人机课堂教学中的应用演示
无人机作为一种先进的航空器,其控制、操作和应用都需要学生进行实践训练。然而,传统的无人机教学过程存在一些问题,比如学生往往无法真实地感受到飞行的过程和环境,以及难以理解复杂的飞行原理和操作步骤。 AR技术的应用可以很好地…
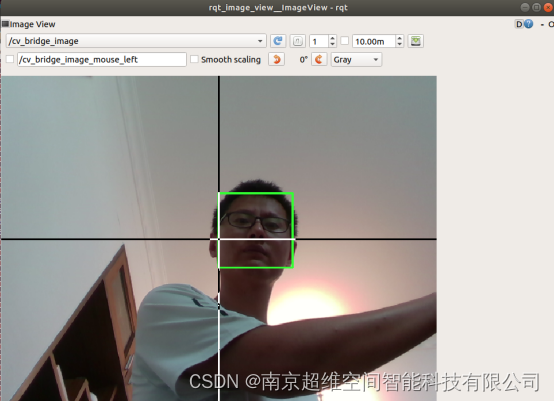
超维空间M1无人机使用说明书——21、基于opencv的人脸识别
引言:M1型号无人机不仅提供了yolo进行物体识别,也增加了基于opencv的人脸识别功能包,仅需要启动摄像头和识别节点即可
一、一键启动摄像头和人脸识别节点
roslaunch robot_bringup bringup_face_detect.launch无报错,出现以下界…
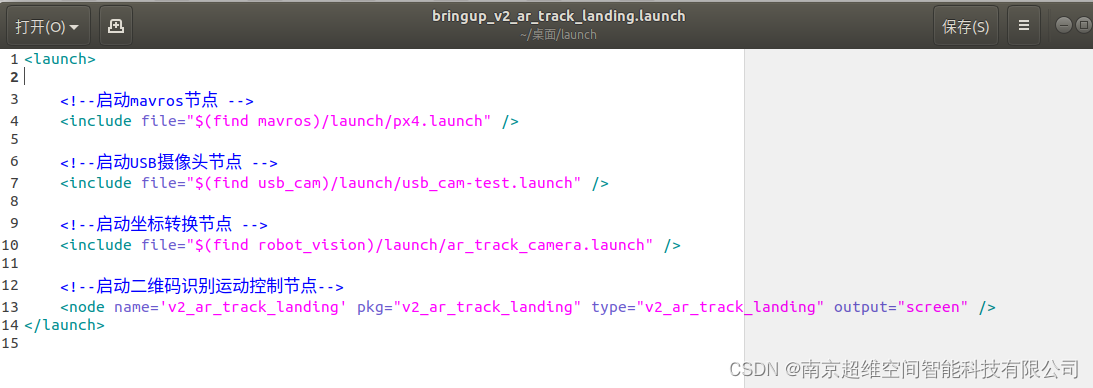
超维空间M1无人机使用说明书——53、ROS无人机二维码识别与降落——V2升级版本
引言:使用二维码引导无人机实现精准降落,首先需要实现对二维码的识别和定位,可以参考博客的二维码识别和定位内容。本小节主要是通过获取拿到的二维码位置,控制无人机全向的移动和降落,本小节再V1版本的基础上增加了动…

【高级飞行功能】DJI AIR 2S
一、飞行动作 1.1飞行动作
螺旋飞行动作 如果风速比较大,可以采用螺旋飞行动作 环绕飞行(飞机云台是对着主体的) 环绕飞行与速度和环绕半径有关; 环绕半径越小,要求速度越慢环绕时,偏离主体中心࿰…

世界上第一台无人机长啥样?
2023
世界上第一台无人机长啥样? 01 无人机(英文通常为drone或unmanned aerial vehicle,简称为UAV)即无人驾驶的飞机,是相对于载人飞机而言,它利用无线电遥控设备和自身的程序控制装置来完成空中的飞行任务…
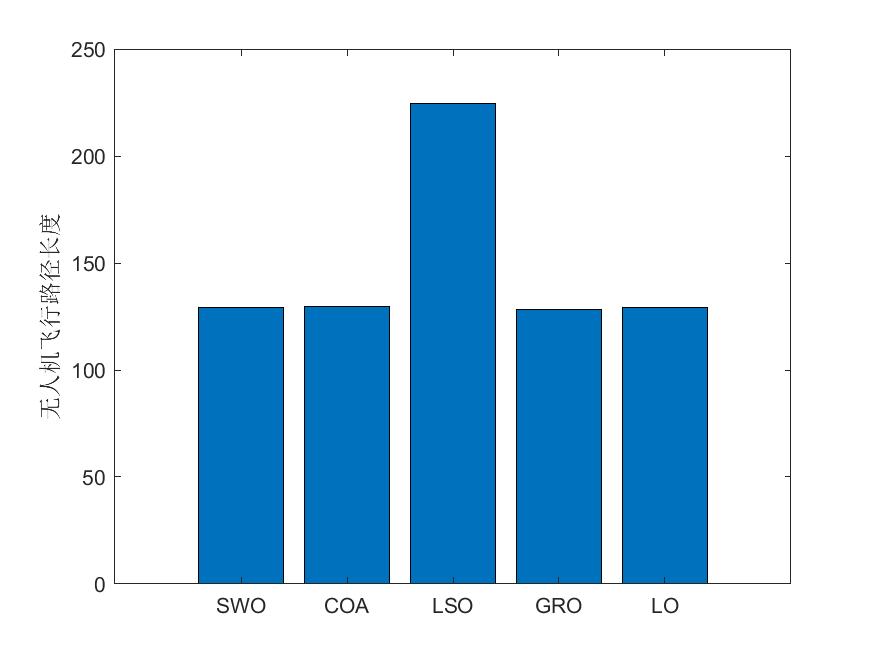
(一)五种最新算法(SWO、COA、LSO、GRO、LO)求解无人机路径规划MATLAB
一、五种算法(SWO、COA、LSO、GRO、LO)简介
1、蜘蛛蜂优化算法SWO
蜘蛛蜂优化算法(Spider wasp optimizer,SWO)由Mohamed Abdel-Basset等人于2023年提出,该算法模型雌性蜘蛛蜂的狩猎、筑巢和交配行为&…
城市消防无人机控制系统的设计
目录
摘 要......................................................................................................................... 2
第一章 绪论.............................................................................................................…
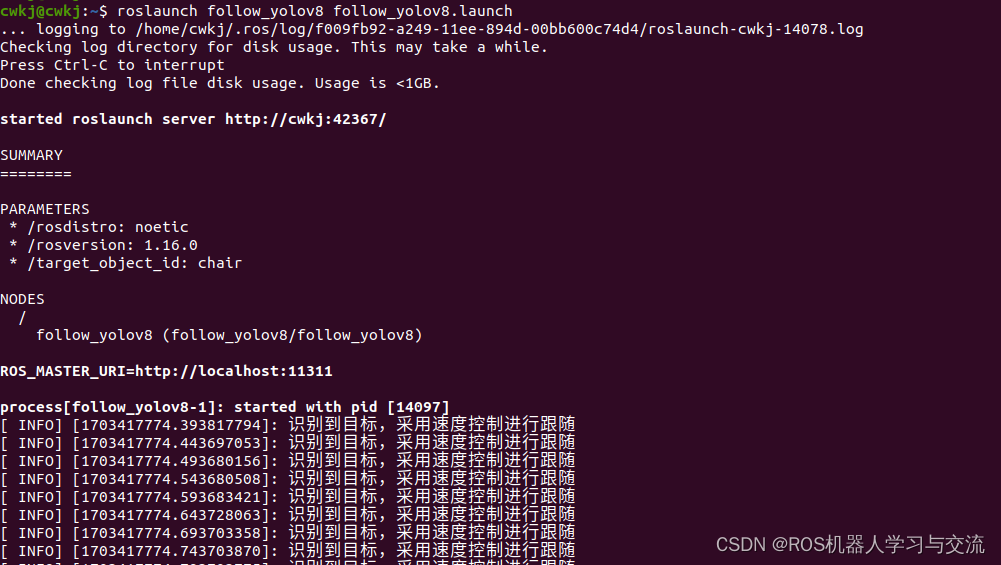
超维空间S2无人机使用说明书——51、基础版——使用yolov8进行目标跟踪
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C的yolov3和yolov4,以及yolov7。
简介,为了提高识别速度,系统采用了G…
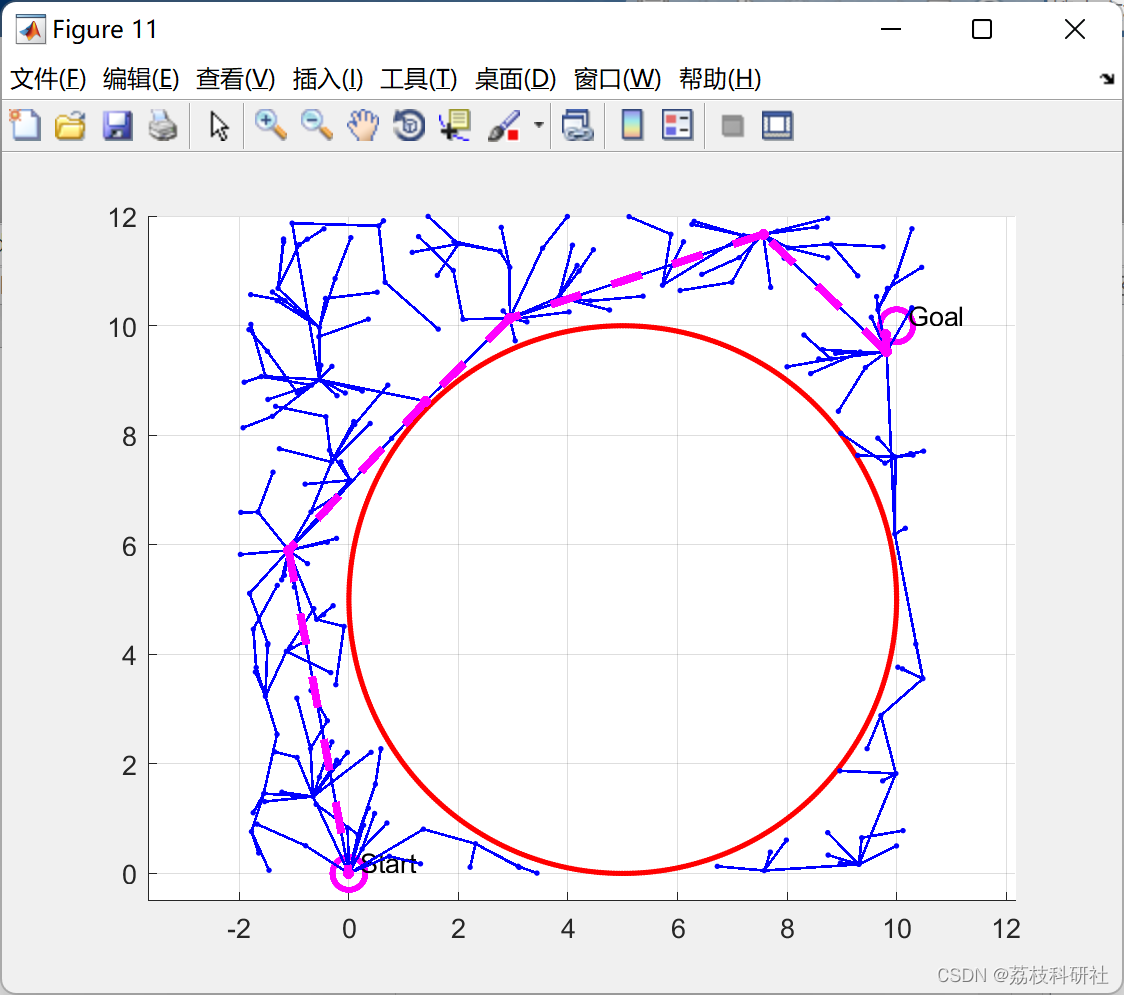
【无人机路径规划】基于IRM和RRTstar进行无人机路径规划(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
(01)ORB-SLAM2源码无死角解析-(37) EPnP 算法原理详解→理论基础一:控制点选取、透视投影约束
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方…
(01)ORB-SLAM2源码无死角解析-(29) ORB特征匹配→ORBmatcher,汉明距离(单目初始化为例)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(1) - 旋转平移矩阵→欧式变换推导
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言(线性变换)
该篇博客主要讲解一个 slam 中最基础的几个东西,那就是旋转矩阵,缩放矩阵以及偏移矩阵。本人会做…

(01)ORB-SLAM2源码无死角解析-(63) BA优化(g2o)→局部建图线程:Optimizer::LocalBundleAdjustment→位姿与地图点优化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
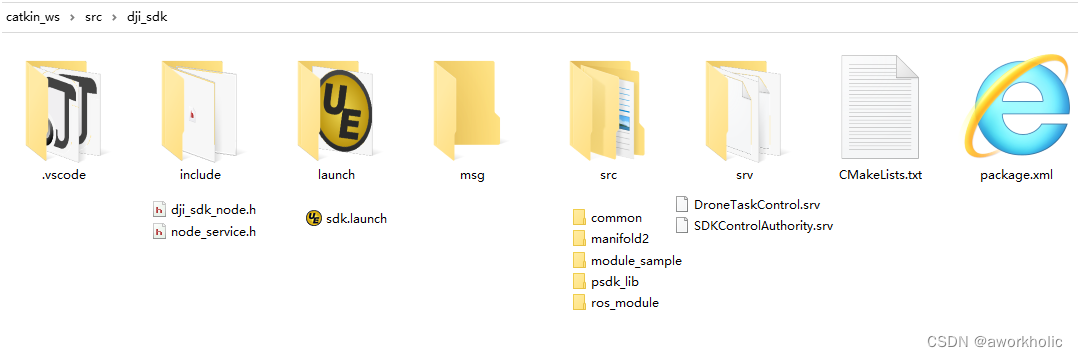
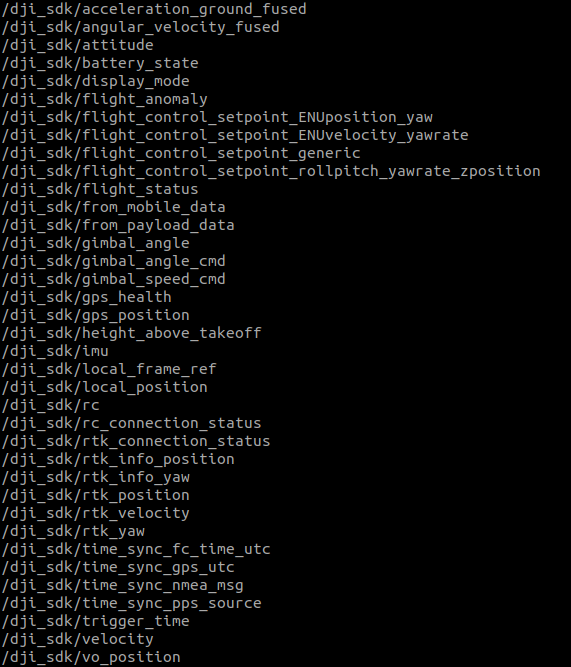
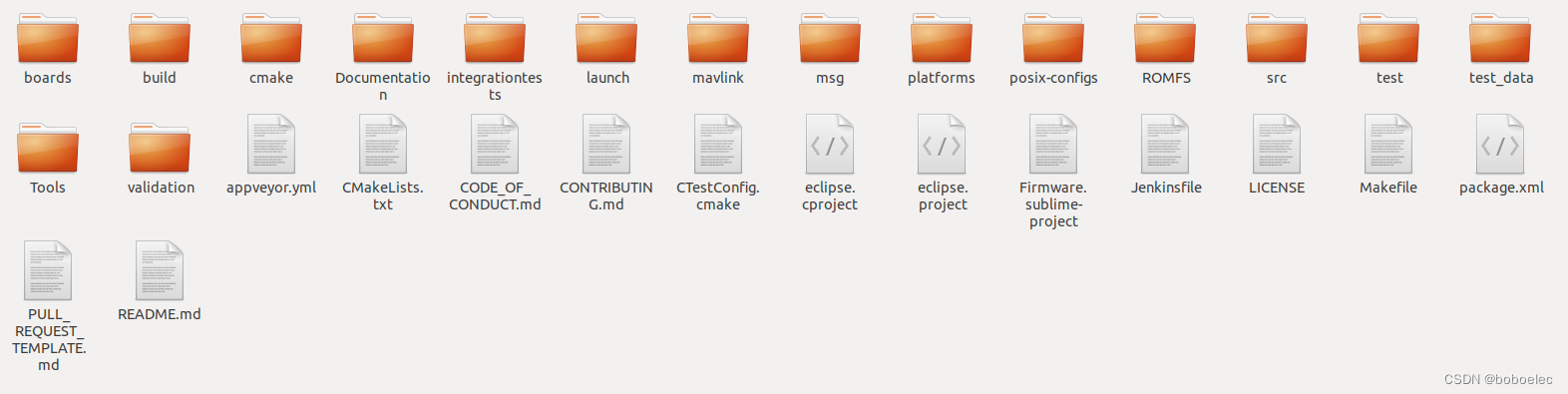
dji uav建图导航系列()ROS中创建dji_sdk节点包(一)项目结构
文章目录 1、整体项目结构1.1、 目录launch1.2、文件CMakeLists.txt1.3、文件package.xml1.4、目录include1.4、目录srv在ROS框架下创建一个无人机的节点dji_sdk,实现必需的订阅(控制指令)、发布(无人机里程计)、服务(无人机起飞降落、控制权得很)功能,就能实现一个类似…

超维空间S2无人机使用说明书——42、使用3维雷达进行室内定位——实物篇
引言:为了提高无人机室内定位的稳定性和多种定位方案,S系列无人机推出了基于三维雷达激光点云数据的定位方案。该方案的提出是为了改善视觉定位容易受到光照等影响导致的位置漂移。
简介
定位采用fast-lio定位算法,通过修改源码直接发布定位…
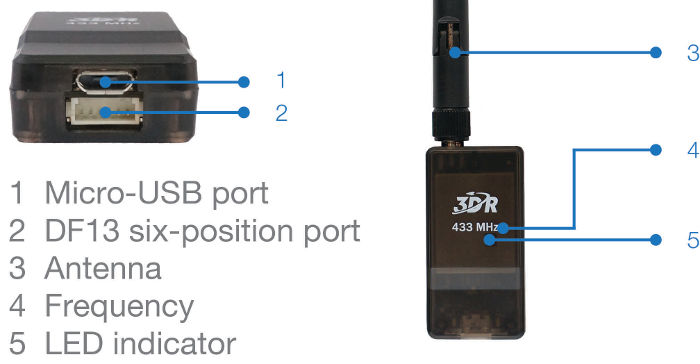
(1)(1.10) SiK Radio v1
文章目录
前言
1 概述
2 连接无线电台
3 参数说明 前言
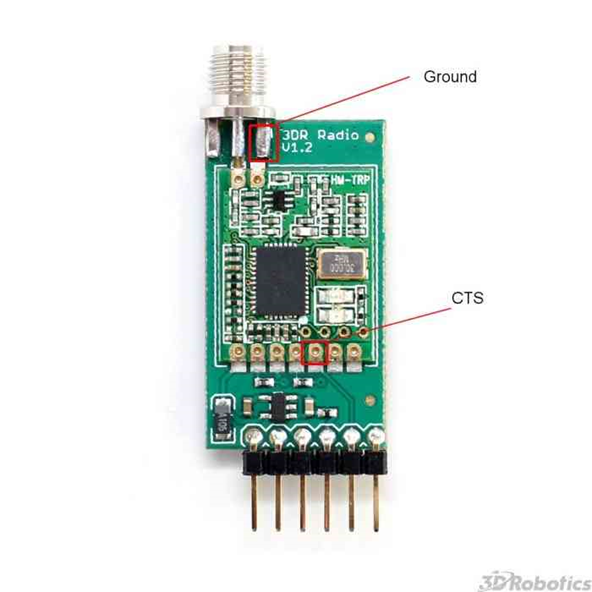
本文介绍了如何将 3DR Radio v1 连接到飞行控制器。你还应阅读 SiK Radio v2,其中包含更详细的用户指南和功能列表。 1 概述
3DR 无线电设备是在自动驾驶仪和地面站之间建立遥测连接的最简单方法。
3DR…
本地远程实时获取无人机采集视频图像(天空端 + jetson nano + 检测分割 + 回传地面端显示)
无线图传设备介绍 2、jetson nano天空端数据采集检测保存 3、本地回传显示
1、无线图传设备介绍 由于本设计考虑将无人机得到检测结果实时回传给地面站显示,因此需要考虑一个远程无线通信设备进行传输。本设计采用思翼HM30图传设备。通过无线图传的wifi将天空端的桌…

复亚智能交通无人机:智慧交通解决方案大公开
城市的现代化发展离不开高效的交通管理规划。传统的交通管理系统庞大繁琐,交警在执行任务时存在安全隐患。在这一背景下,复亚智能交通无人机应运而生,成为智慧交通管理中的重要组成部分。交通无人机凭借其高灵活性、低成本、高安全性等特点&a…
无人机真机搭建问题记录文档(待续)
搭建问题
问题1
高飞课程中的飞控停产,更换飞控(pixhawx 6c)出现如下问题 1、飞控太大造成安装机载电脑的碳板上的孔被挡住。 2、课程提供的飞控固件,与更换的飞控不匹配
解决办法
1、现在的无人机碳板上只安装三个螺纹孔&…
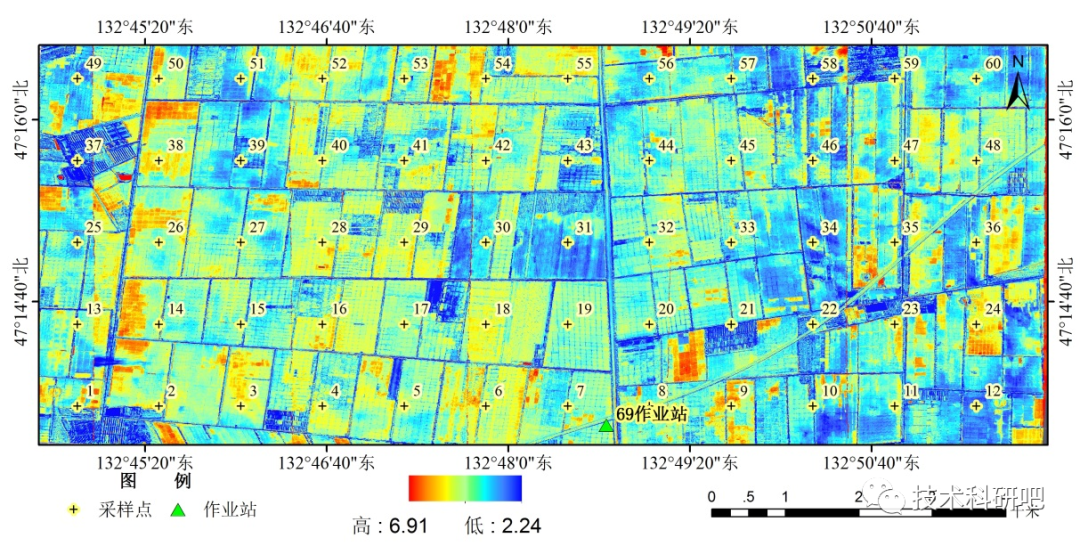
基于MATLAB的无人机遥感数据预处理与农林植被性状估算
在新一轮互联网信息技术大发展的现今,无人机、大数据、人工智能、物联网等新兴技术在各行各业都处于大爆发的前夜。为了将人工智能方法引入农业生产领域。首先在种植、养护等生产作业环节,逐步摆脱人力依赖;在施肥灌溉环节构建智慧节能系统&a…
10.22 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、自动驾驶一周资讯 -小马智行获准在阿布扎比开展自动驾驶道路测试;智加科技与东风柳汽达成合作;通用、本田和Cruise设立合资公司
自动驾驶一周资讯 -小马智行获准在…
AUTOSAR从入门到精通-【应用篇】基于AUTOSAR的小车倒立摆平衡控制技术研究
目录
前言
AUTOSAR研究现状
平衡控制的研究现状
AUTOSAR架构分析及系统的动力学模型建立
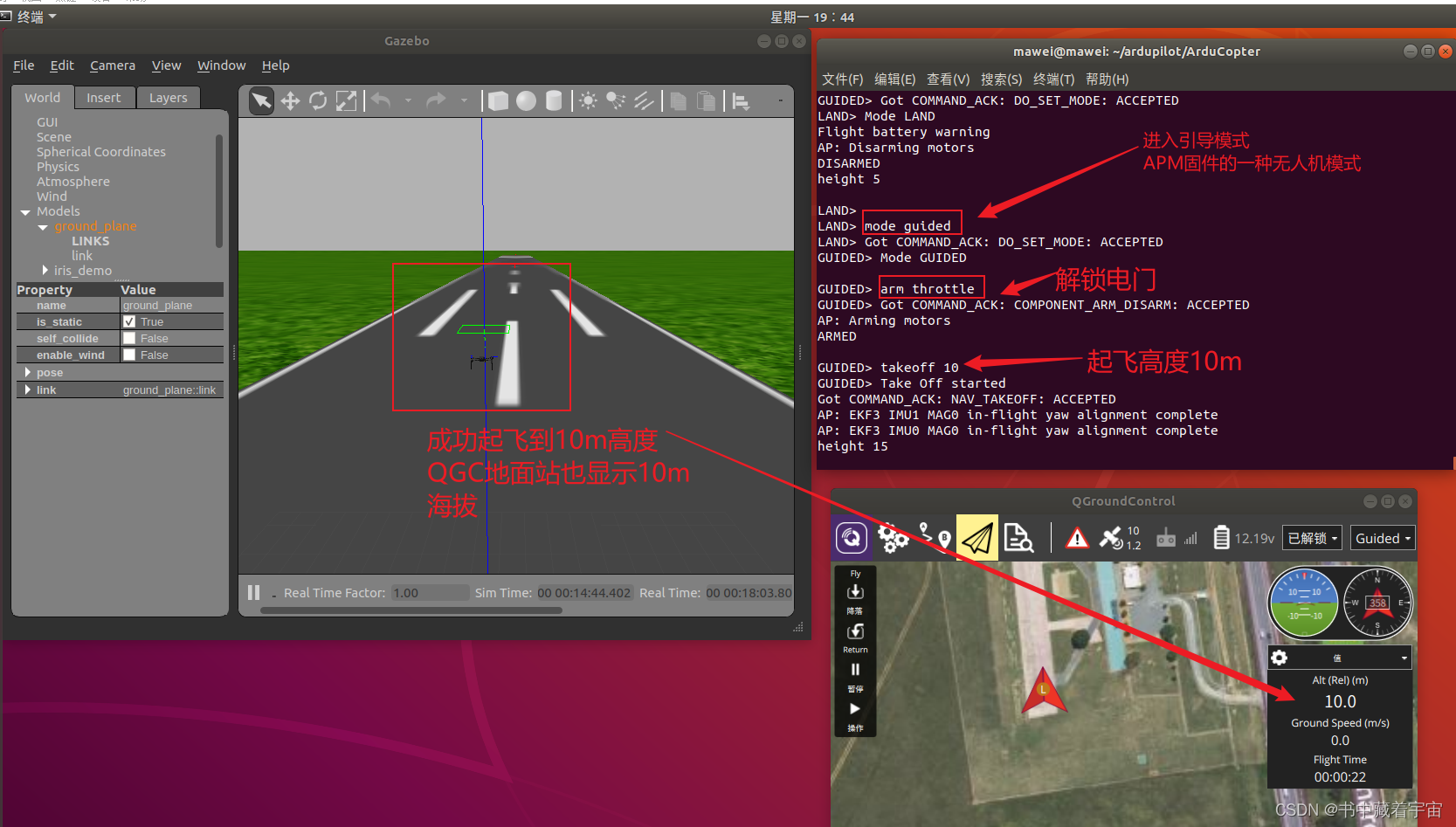
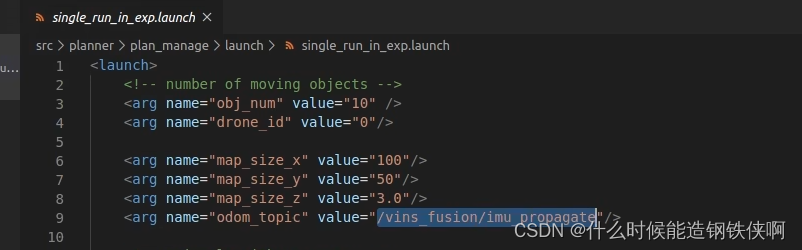
APM固件编译和仿真
事情起因
主要想对无人机APM固件进行仿真的算法验证,因实际飞行的过程实际验证太浪费飞机了,所以就先试用仿真对算法进行仿真开发。
一,环境搭建
环境搭建我建议参考官方英文教程,英文教程写的比较全,不懂可以自己使…

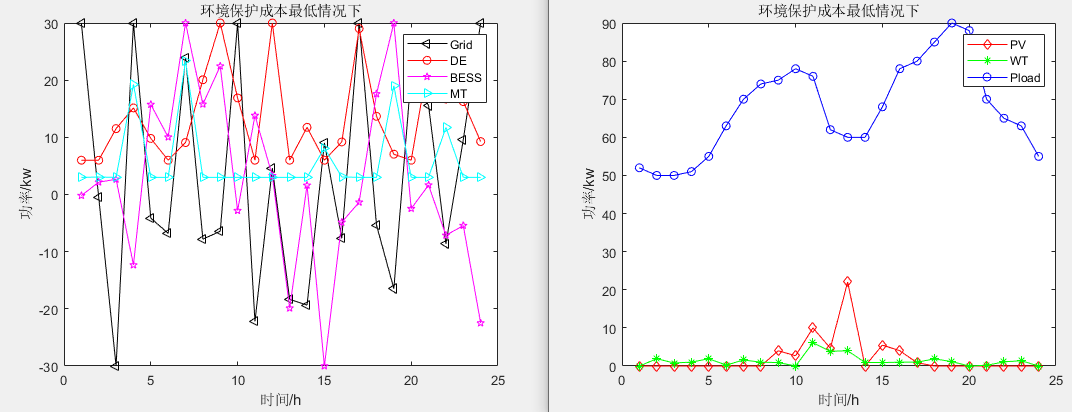
多目标应用:基于非支配排序的鲸鱼优化算法NSWOA求解微电网多目标优化调度(MATLAB代码)
一、微网系统运行优化模型
微电网优化模型介绍:
微电网多目标优化调度模型简介_IT猿手的博客-CSDN博客
二、基于非支配排序的鲸鱼优化算法NSWOA
基于非支配排序的鲸鱼优化算法NSWOA简介: 三、基于非支配排序的鲸鱼优化算法NSWOA求解微电网多目标优化…
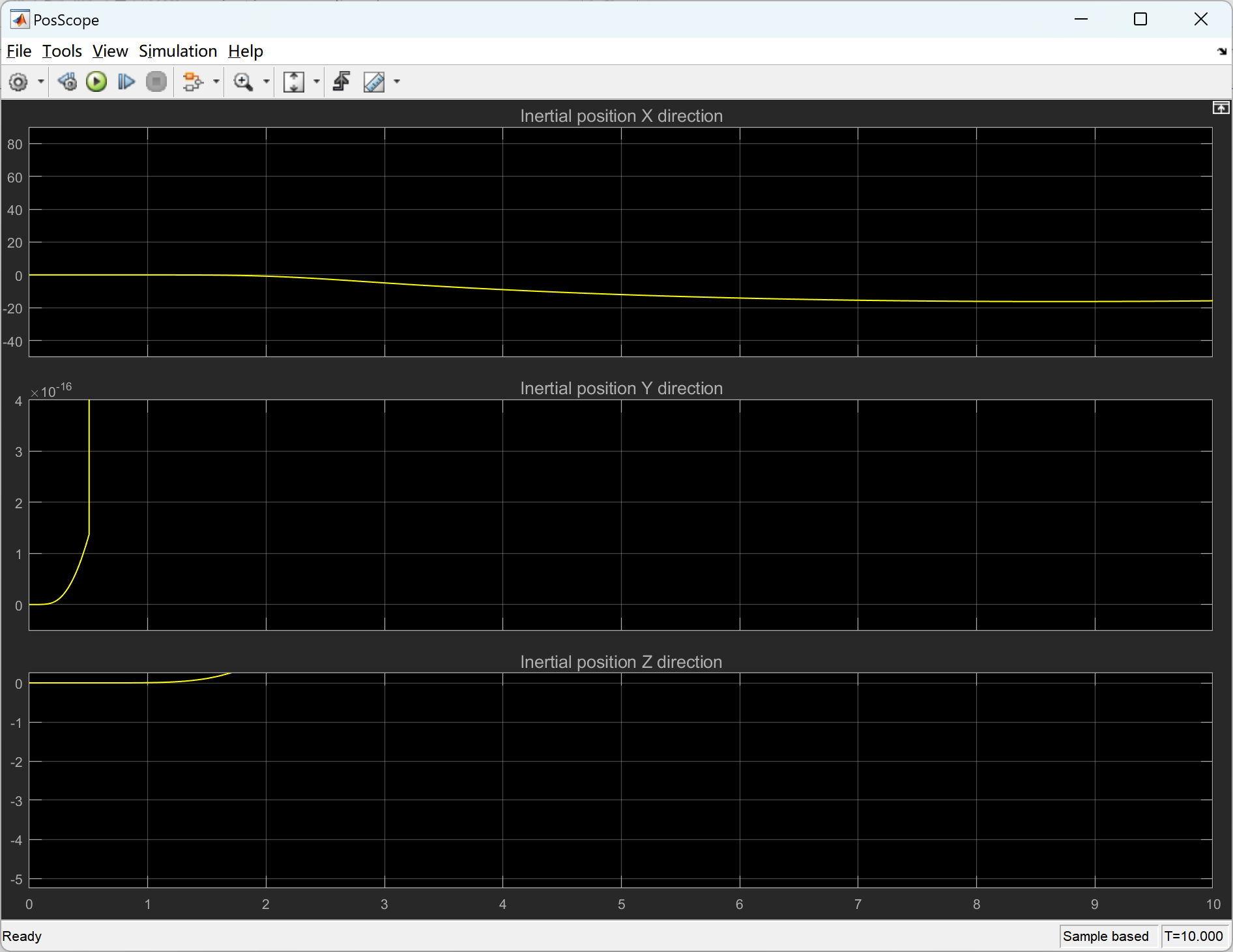
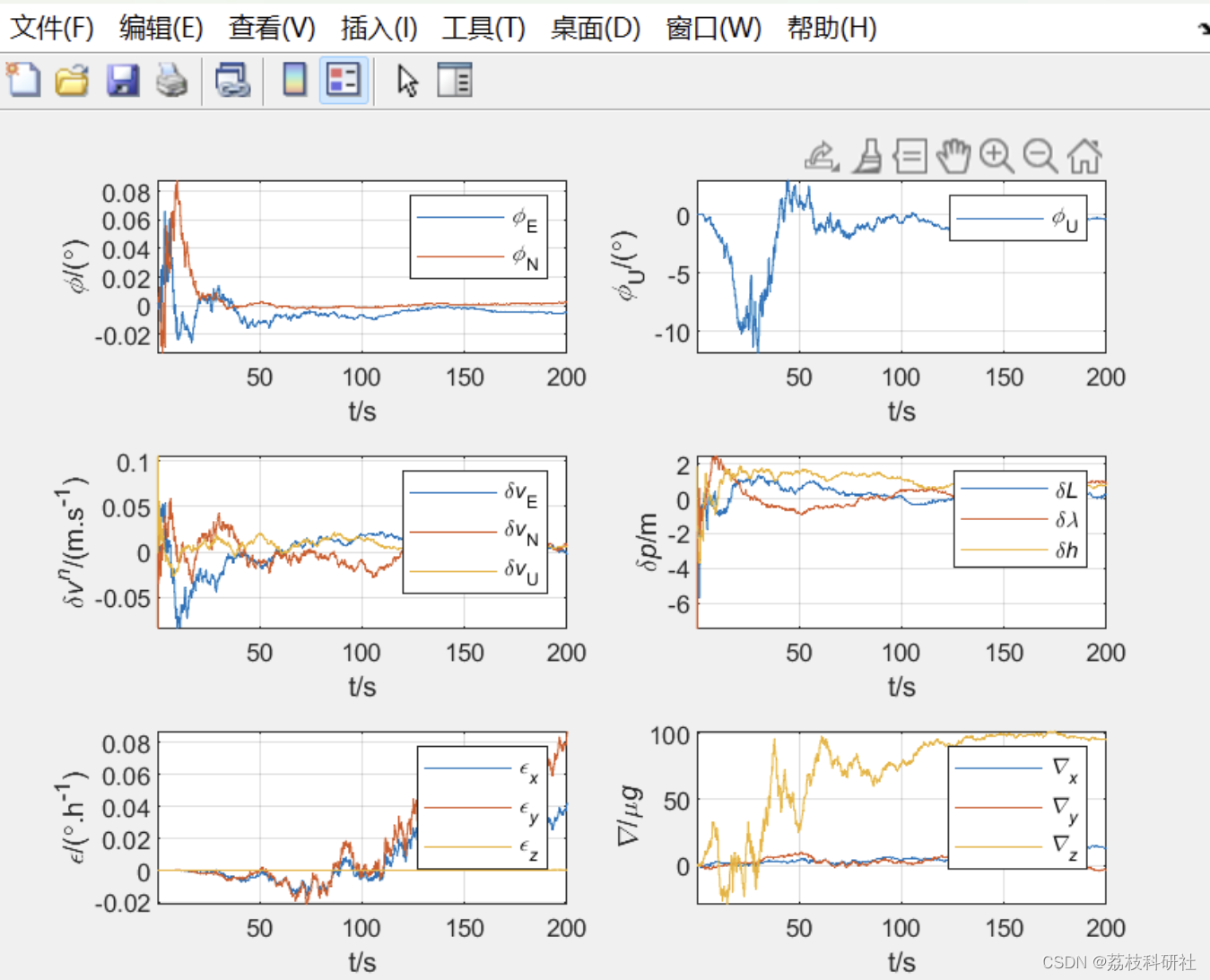
stm32无人机-飞行力学原理
惯性导航,是一种无源导航,不需要向外部辐射或接收信号源,就能自主进行确定自己在什么地方的一种导航方法。
惯性导航主要由惯性器件计算实现,惯性器件包括陀螺仪和加速度计。一般来说,惯性器件与导航物体固连…
浅述无人机技术在地质灾害应急救援场景中的应用
12月18日23时,甘肃临夏州积石山县发生6.2级地震,震源深度10千米,灾区电力、通信受到影响。地震发生后,无人机技术也火速应用在灾区的应急抢险中。目前,根据受灾地区实际情况,翼龙-2H应急救灾型无人机已出动…
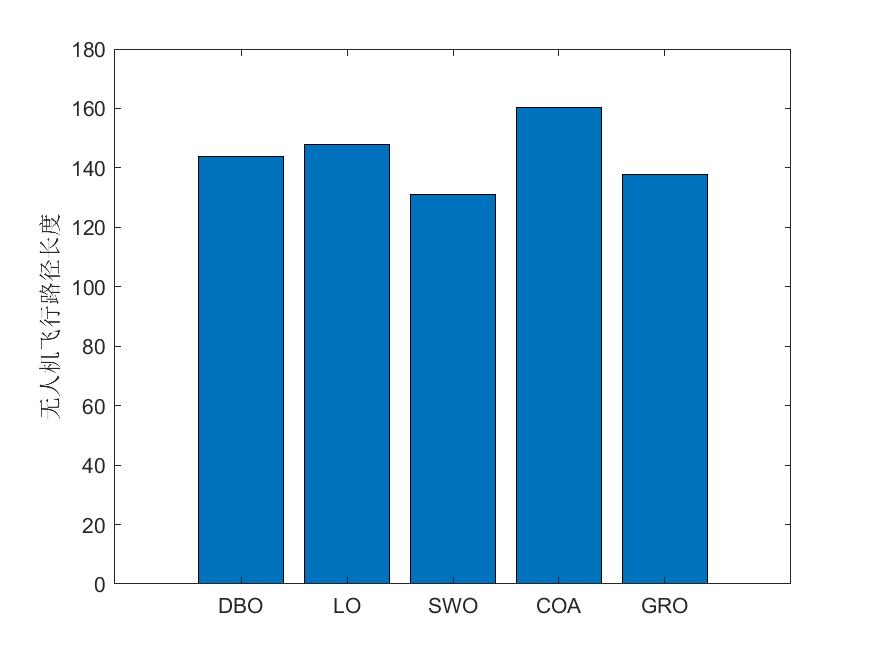
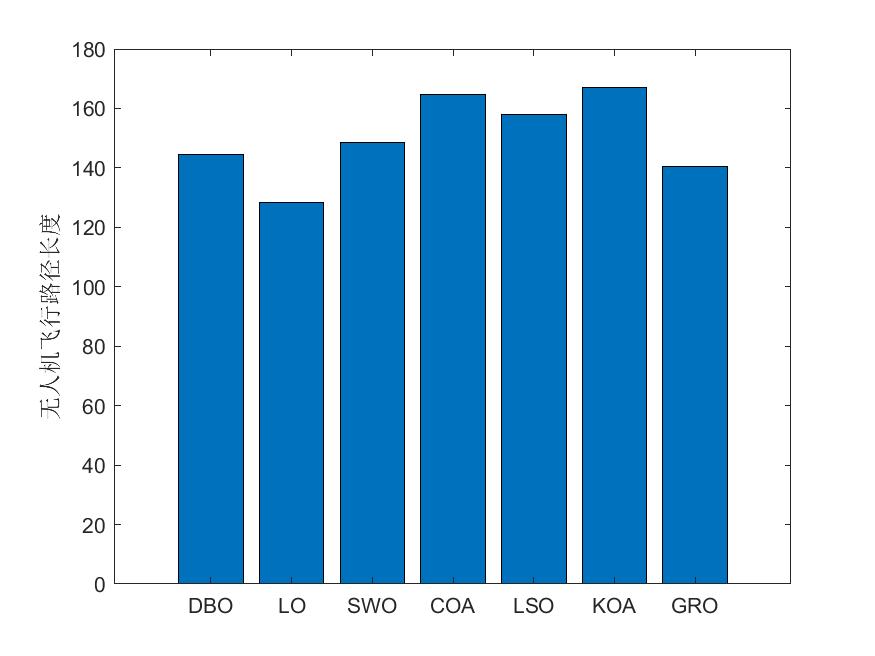
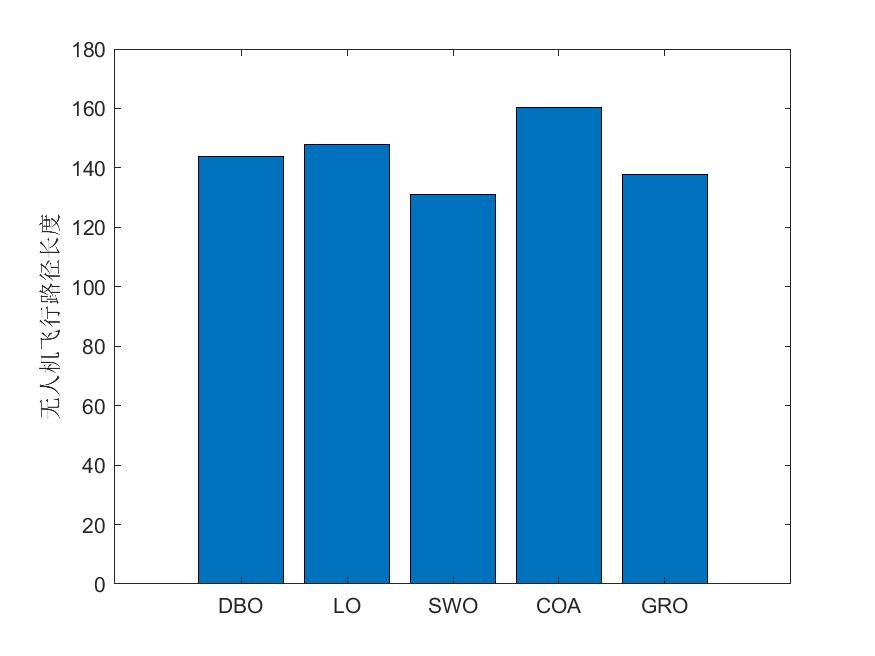
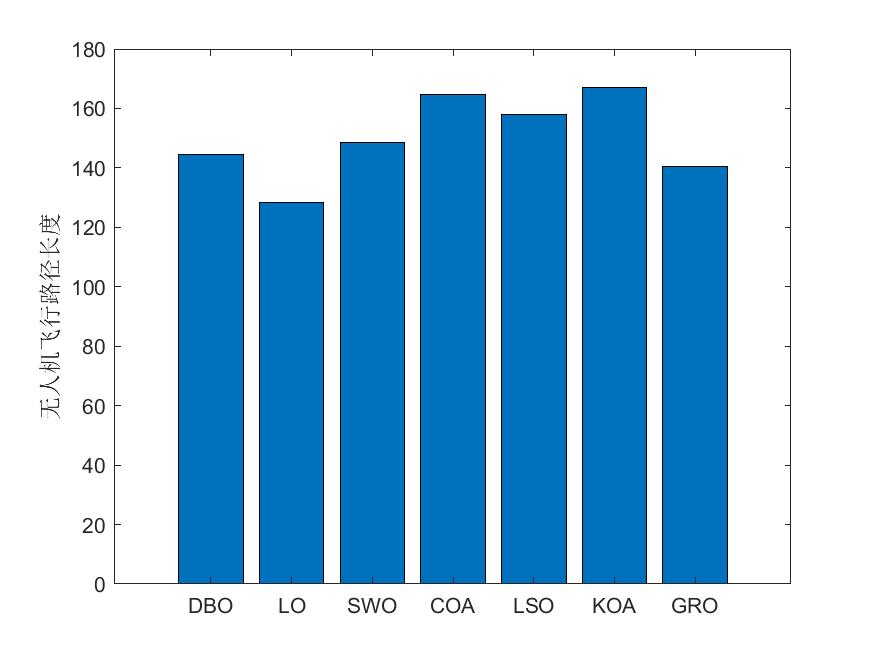
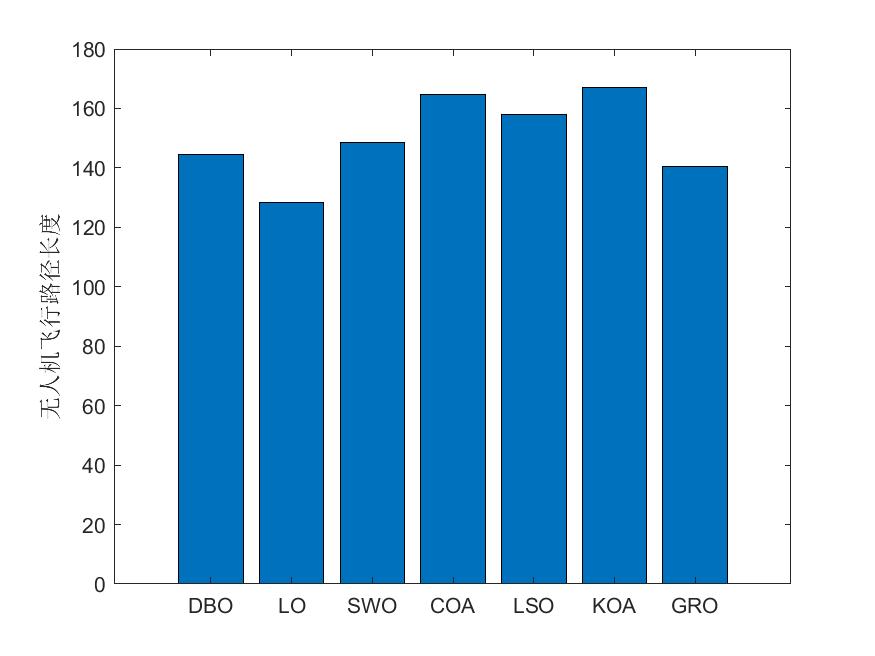
(七)五种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、五种算法(DBO、LO、SWO、COA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为的启…

Python树莓派开发
欢迎关注博主 Mindtechnist 或加入【智能科技社区】一起学习和分享Linux、C、C、Python、Matlab,机器人运动控制、多机器人协作,智能优化算法,滤波估计、多传感器信息融合,机器学习,人工智能等相关领域的知识和技术。关…

实用高效 无人机光伏巡检系统助力电站可持续发展
近年来,我国光伏发电行业规模日益壮大,全球领先地位愈发巩固。为解决光伏电站运维中的难题,浙江某光伏电站与复亚智能达成战略合作,共同推出全自动无人机光伏巡检系统,旨在提高发电效率、降低运维成本,最大…
限制航空和无人机图像用于定量遥感的分析
一、前言“请注意航空和无人机图像通常没有经过很好的校准这一事实。对此类图像的任何定量分析(例如植被指数)的输出都应非常小心地解释,尤其是在比较一天中不同时间获取的图像时或年份。”航空(包括无人机或无人驾驶飞行器&#…
无人机风速风向仪-百科小天地
随着科技的不断进步,无人机技术已经广泛应用于各个领域,包括气象监测。近年来,无人机风速风向仪的出现,为气象监测带来了革命性的变革。本文将介绍无人机风速风向仪的原理、优势以及在气象监测领域的应用,让我们一起领…
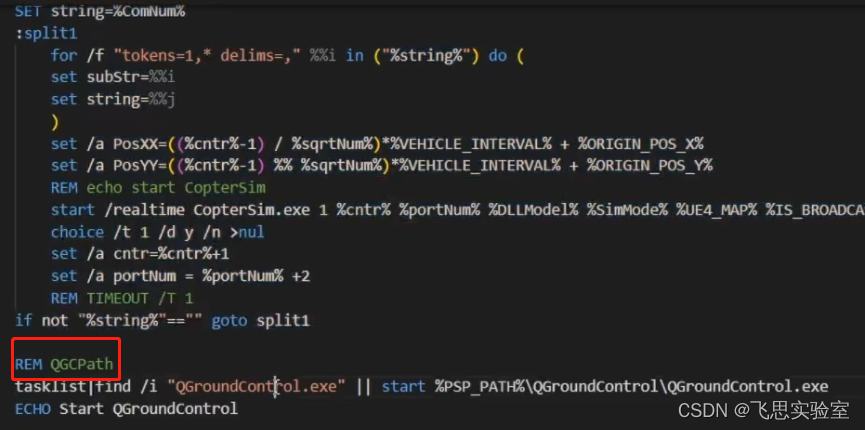
平台使用篇 | 批处理(bat)脚本使用教程(四)
导读
一个开启多机软件在环仿真的批处理文件 (对应卓面RflyTools文件夹中SITLRun快捷方式),双击它,输入想要生成的飞机数量,即可生成多机软件在环仿真,等待RflySim3D显示3DFixed 4/4,然后可通过QGC控制飞机起飞。运行…
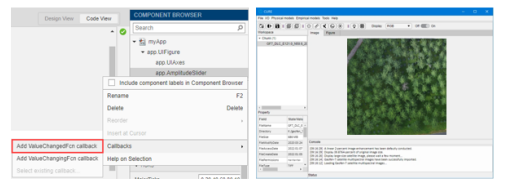
掌握无人机遥感数据预处理的全链条理论与实践流程、典型农林植被性状的估算理论与实践方法、利用MATLAB进行编程实践(脚本与GUI开发)以及期刊论文插图制作
在新一轮互联网信息技术大发展的现今,无人机、大数据、人工智能、物联网等新兴技术在各行各业都处于大爆发的前夜。为了将人工智能方法引入农业生产领域。首先在种植、养护等生产作业环节,逐步摆脱人力依赖;在施肥灌溉环节构建智慧节能系统&a…
“华为杯”第十七届中国研究生 数学建模竞赛-【华为杯】D题:无人机集群协同对抗(附优秀论文及python代码实现)
目录
摘 要:
1 问题重述
1.1 问题背景
1.2.1 问题一:逃逸区与最优突防策略求解
(02)Cartographer源码无死角解析-(16) SensorBridge→Rigid3(刚体变换)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(01)ORB-SLAM2源码无死角解析-(57) 闭环线程→计算Sim3:理论推导(2)求解R,使用四元数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(18) SVD奇异值分解→求解Homography,Fundamental矩阵,了解矩阵自由度
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方中心提供了本人 联系…
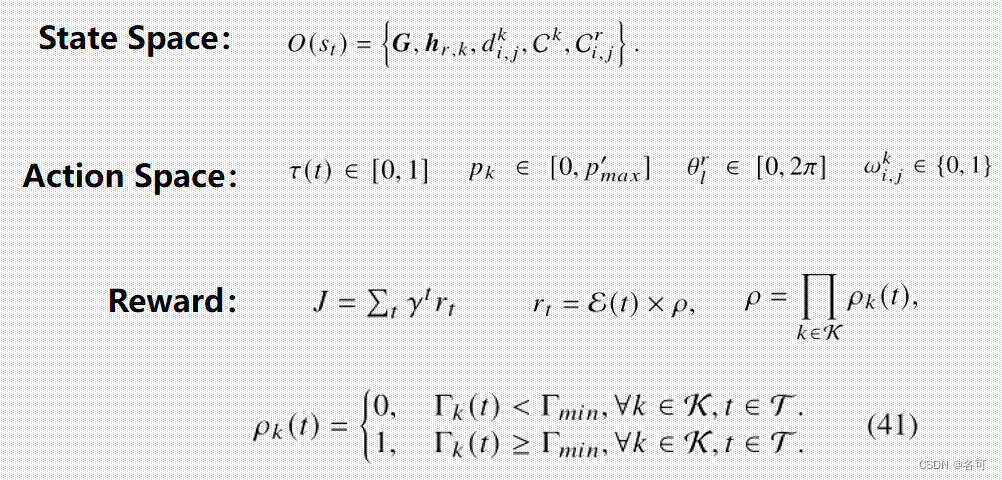
无人机(UAV)隐蔽通信(covert communication)的联合功率分配和轨迹设计
文章目录 摘要Introduction 本文是Joint Power Allocation and Trajectory Design for UAV-Enabled Covert Communication一文的阅读笔记 摘要
在本文中,我们研究了无人机(UAV)网络中的隐蔽通信,其中无人机将信息传输给多个地面用…
(三)Tiki-taka算法(TTA)求解无人机三维路径规划研究(MATLAB)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、Tiki-taka算法(TTA…
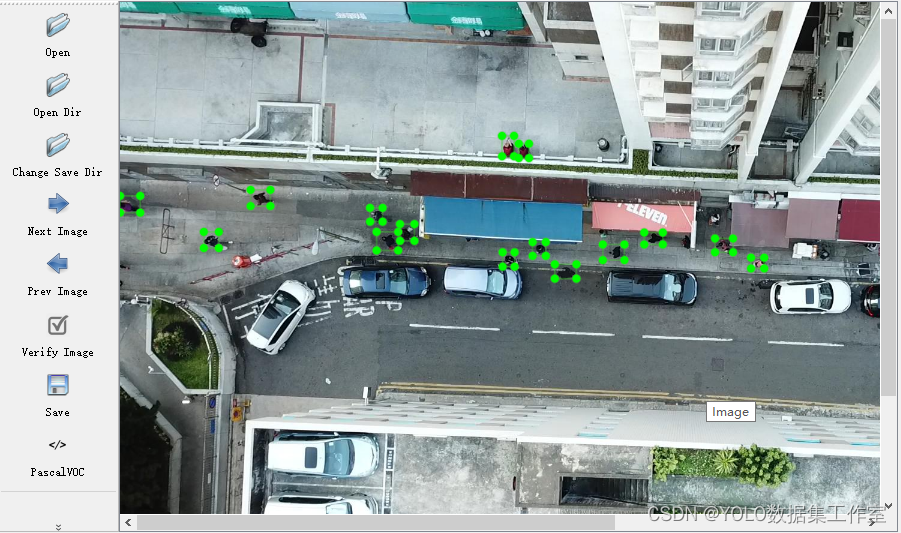
YOLO目标检测——无人机航拍行人检测数据集下载分享【含对应voc、coc和yolo三种格式标签】
实际项目应用:智能交通管理、城市安防监控、公共安全救援等领域数据集说明:无人机航拍行人检测数据集,真实场景的高质量图片数据,数据场景丰富标签说明:使用lableimg标注软件标注,标注框质量高,…
(二)Tiki-taka算法(TTA)求解无人机三维路径规划研究(MATLAB)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、Tiki-taka算法(TTA…
(01)ORB-SLAM2源码无死角解析-(23) 单目SFM地图初始化→CreateInitialMapMonocular()-总体流程
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

GNSS技术与无人机协同:开启未来交通新篇章
随着科技的不断发展,全球导航卫星系统(GNSS)技术与无人机技术的协同应用成为未来交通系统的引人瞩目的新方向。创新微公司在这一领域的技术创新为实现GNSS技术与无人机的紧密协同提供了新的可能性。本文将深入探讨GNSS技术与无人机协同的前景…
Agisoft Metashape 基于RTK技术的无人机航测免像控技术流程
Agisoft Metashape 基于RTK技术的无人机航测免像控技术流程 文章目录 Agisoft Metashape 基于RTK技术的无人机航测免像控技术流程前言一、软件设置二、添加照片三、坐标转换四、高程改正五、导入检查点六、对齐照片七、检查点刺点八、精度分析前言
利用无人机进行航空摄影测量…

林业无人机如何提升巡山护林效率?
在郁郁森林之上,一架无人机正盘旋在上空时刻观察着林区的情况。凭借复亚智能的全自动巡检系统,无人机巡山护林的巡视范围和反馈实时性得到了显著提升。 一、林业无人机:科技赋能森林防火
秋季林区时常发生火灾,林业无人机在森林防…
四旋翼无人机的飞行原理--【其利天下分享】
近年来,无人机在多领域的便捷应用促使其迅猛的发展,如近年来的多场战争,无人机的战场运用发挥得淋漓尽致。
下面我们针对生活中常见的四旋翼无人机的飞行原理做个基础的介绍,以飨各位对无人机有兴趣的朋友。 一:四旋翼…

高精度定位|RTK定位模块常见应用领域_厘米级室外定位解决方案
在室外场景,北斗、GPS等GNSS定位技术在持续的演变,精度越来越高,应用面也越来越广。随着新基建热潮的到来,借助5G新基建,无人驾驶、自动驾驶等技术正在逐步完善,对于定位的需求已经不仅仅只是粗略的轨迹&am…
无人机智慧工地:助力工地管理的未来之选
在现代工地管理中,无人机凭借其小巧、轻便和多角度拍摄等特点得到广泛应用,尤其在智慧工地的现场管理中发挥着重要作用。 一、无人机代替人工巡检省时省力
以往,施工现场检查主要依赖人工巡检方式,需要较长时间。而现在ÿ…
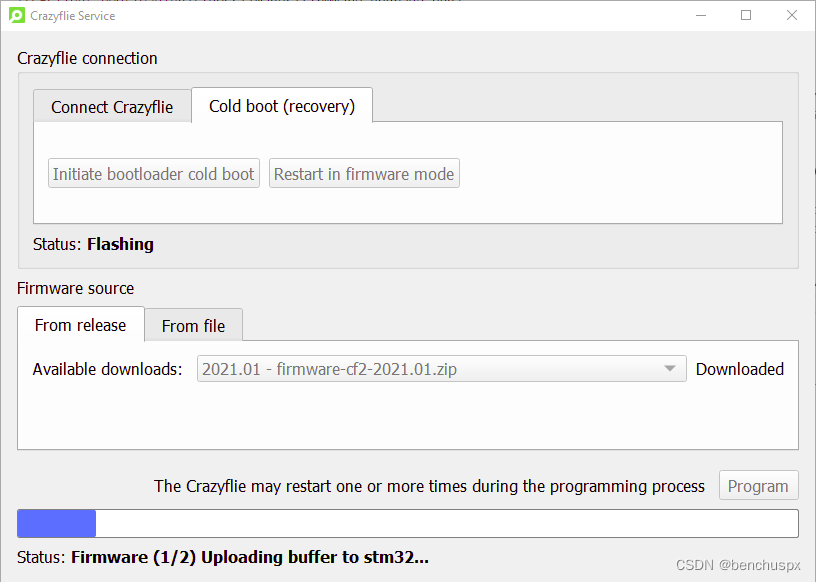
crazyswarm下载编译和使用问题整理
本文写于2021.12.6 最近一次更新为2023.1.5
目录
项目简介
安装步骤
编译报错解决
使用注意 项目简介
crazyswarm版本对应commit为 4d6ca47b085227fbc893479894001d1c7ceab5cc
crazyswarm项目地址
GitHub - USC-ACTLab/crazyswarm: A Large Quadcopter SwarmA Large Qu…

无人机光电系统图像处理模块
CaseVision无人机光电系统图像处理模块AVT22
上海凯视力成信息科技有限公司 刘泊淼 CaseVision公司最新推出适合无人机光电系统的多功能图像处理模块AVT22。该模块提供了丰富的视频处理功能,显著提高无人机光电系统的探测性能,针对无人机应用要求的特点…

基于类电磁机制算法的无人机航迹规划-附代码
基于类电磁机制算法的无人机航迹规划 文章目录 基于类电磁机制算法的无人机航迹规划1.类电磁机制搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用类电磁机制算法来优化无人机航迹…

基于适应度相关算法的无人机航迹规划-附代码
基于适应度相关算法的无人机航迹规划 文章目录 基于适应度相关算法的无人机航迹规划1.适应度相关搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用适应度相关算法来优化无人机航迹…
无人机顶会顶刊2023
无人机顶会顶刊2023 国际期刊1、Science Robotics2、IEEE Transactions on Robotics(TRO)3、IEEE Transactions on Automation Science and Engineering(TASE)4、International Journal of Robotics Research(IJRR)5、IEEE Robotics and Automation Lett…

国外无人机蜂群作战样式进展及反蜂群策略研究
源自:现代防御技术
作者:王瑞杰, 王得朝, 丰璐, 赵正党, 陈浙梁
摘 要
科技进步和军事需求的联合推动下,无人机蜂群作战成为一种新兴的并能够改变战争规则的颠覆性作战样式,各军事强国围绕“蜂群技术和战术”展开了激烈的竞争…


多无人机在线路径规划的新算法
南京航空航天大学自动化学院使用NOKOV度量动作捕捉系统获取多架无人机的精确位置信息,实现多架无人机协同实时路径规划。 研究背景
近年来,无人机越来越多地应用于执行战场侦察、目标识别、跟踪打击等任务。
由多架无人机协同执行任务,通过…
(01)ORB-SLAM2源码无死角解析-(24) 单目SFM地图初始化→CreateInitialMapMonocular()-细节分析:尺度不确定性
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
五种多目标优化算法(MOJS、NSGA3、MOGWO、NSWOA、MOPSO)求解微电网多目标优化调度(MATLAB代码)
一、多目标优化算法简介
(1)多目标水母搜索算法MOJS
多目标优化算法:多目标水母搜索算法MOJS(提供MATLAB代码)_水母算法-CSDN博客
(2)NSGA3
NSGA-III求解微电网多目标优化调度(M…

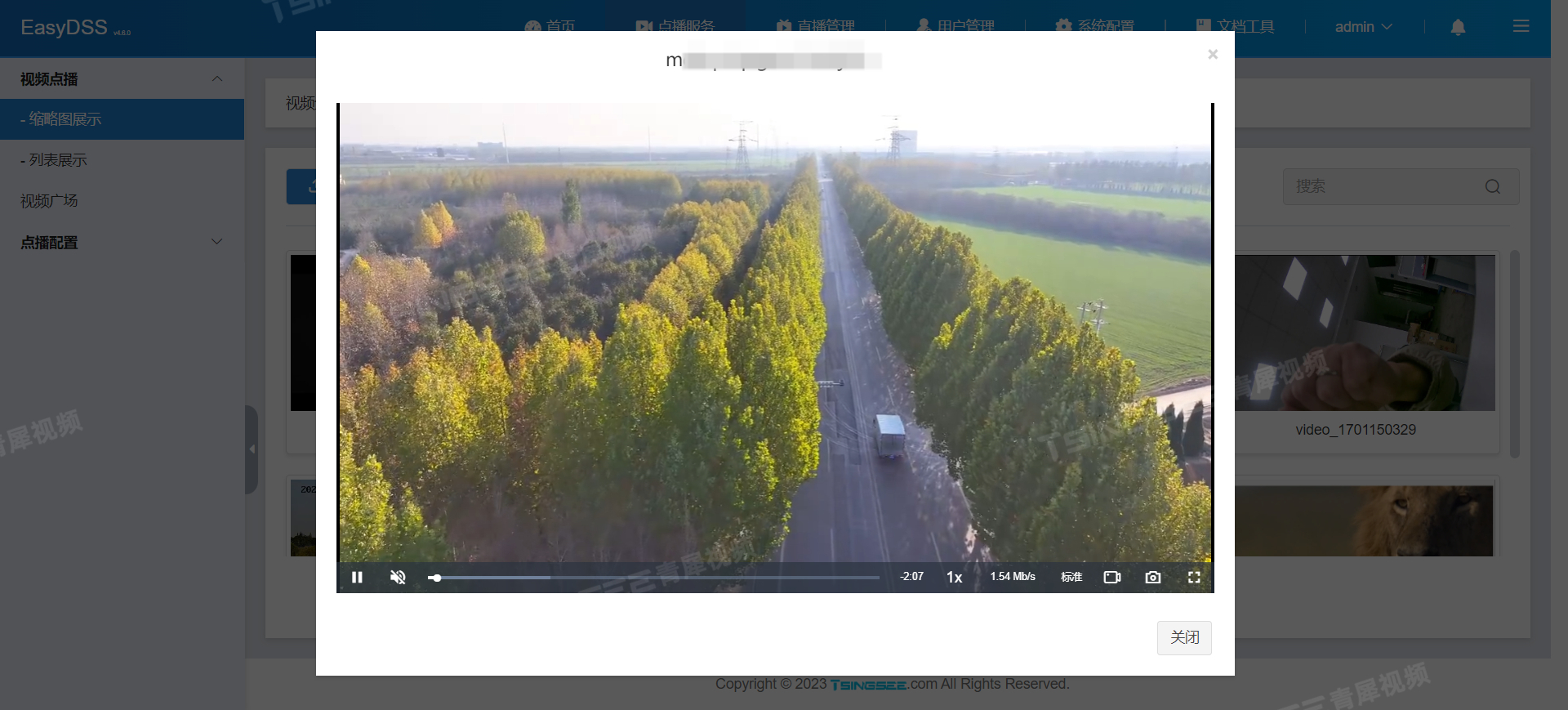
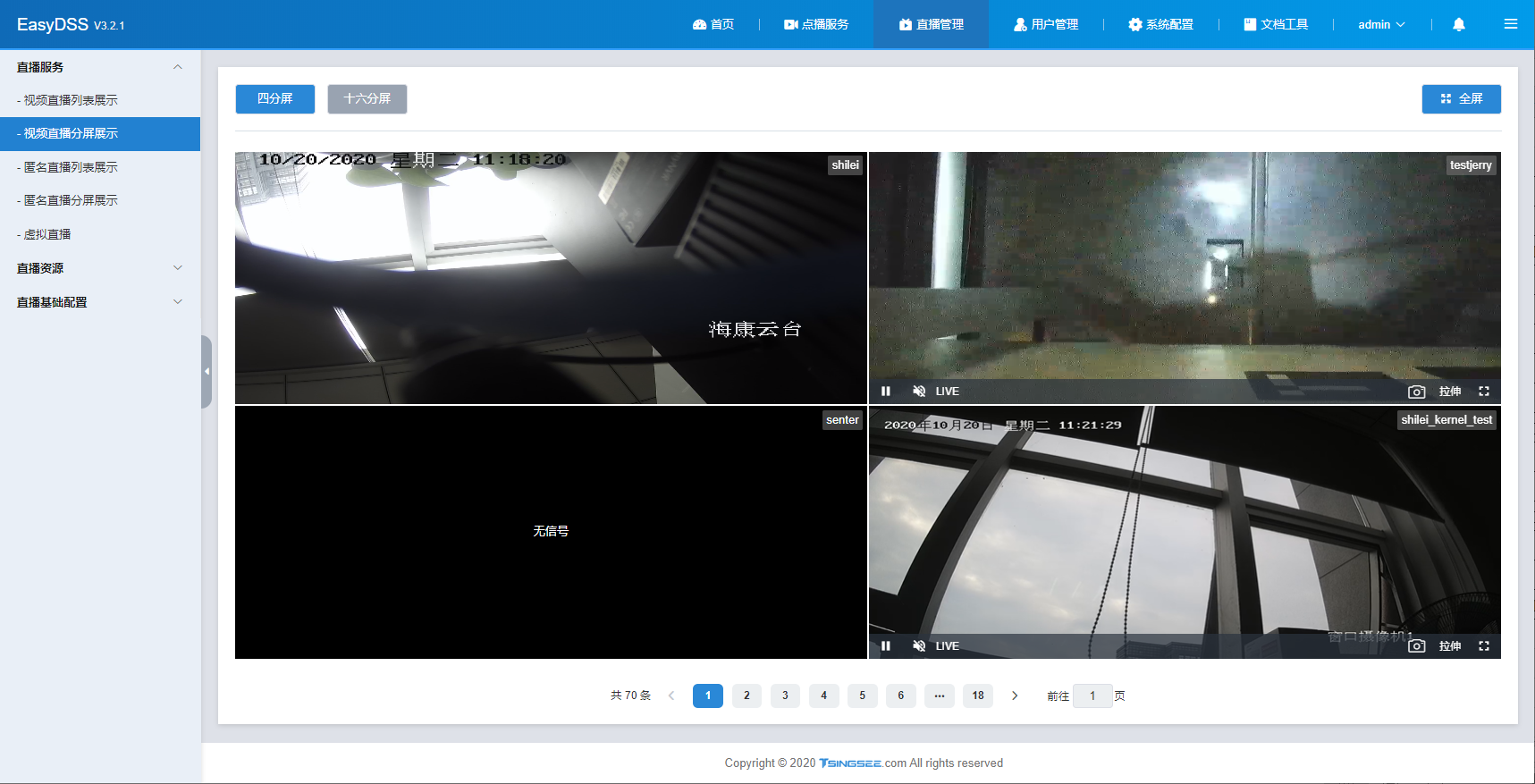
视频推拉流EasyDSS互联网直播/点播平台构建户外无人机航拍直播解决方案
一、背景分析
近几年,国内无人机市场随着航拍等业务走进大众,出现爆发式增长。无人机除了在民用方面的应用越来越多,在其他领域也已经开始广泛应用,比如公共安全、应急搜救、农林、环保、交通 、通信、气象、影视航拍等。无人机使…

基于驾驶训练算法的无人机航迹规划-附代码
基于驾驶训练算法的无人机航迹规划 文章目录 基于驾驶训练算法的无人机航迹规划1.驾驶训练搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用驾驶训练算法来优化无人机航迹规划。 …
强化学习应用(二):基于Q-learning的无人机物流路径规划研究(提供Python代码)
一、Q-learning简介
Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的问题。它通过学习一个价值函数来指导智能体在环境中做出决策,以最大化累积奖励。
Q-learning算法的核心思想是通过不断更新一个称为Q值的…
基于人工蜂群算法多无人机轨迹规划
#生物背景
蜜蜂是一种群居生物,生物学家研究发现蜜蜂以跳舞的方式来交换蜜源信息。根据分工的不同,蜜蜂被分为三个工种:引领峰、跟随蜂、侦察蜂。
侦察蜂的职责是侦察蜜源(即蜜蜂的食物),一旦某一个侦察蜂…
无人机视角、多模态、模型剪枝、国产AI芯片部署
无人机视角、多模态、模型剪枝、国产AI芯片部署是当前无人机技术领域的重要研究方向,其原理和应用价值在以下几个方面进行详细讲述。
一、无人机视角:无人机视角是指在无人机上搭载摄像头等设备,通过航拍图像获取环境信息,并进行…
AUTOSAR从入门到精通-【应用篇】基于 AUTOSAR 的辅助驾驶系统域控制器软件开发(续)
目录 3.4 软件平台 CameraService 模块开发 3.4.1 中继模块 3.4.2 数据管理与调度模块

【滤波跟踪】基于matlab扩展卡尔曼滤波的无人机路径跟踪【含Matlab源码 2236期】
⛄一、EKF算法简介
扩展卡尔曼滤波是利用泰勒级数展开方法将非线性滤波问题转化成近似的线性滤波问题,利用线性滤波的理论求解非线性滤波问题的次优滤波算法。其系统的状态方程和量测方程分别如式(1)、式(2)所示: 式中,X(k)为n维的随机状态向量序列,Z(k)为n维的随机量测向量序…

基于斑马算法的无人机航迹规划-附代码
基于斑马算法的无人机航迹规划 文章目录 基于斑马算法的无人机航迹规划1.斑马搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用斑马算法来优化无人机航迹规划。 1.斑马搜索算法
…
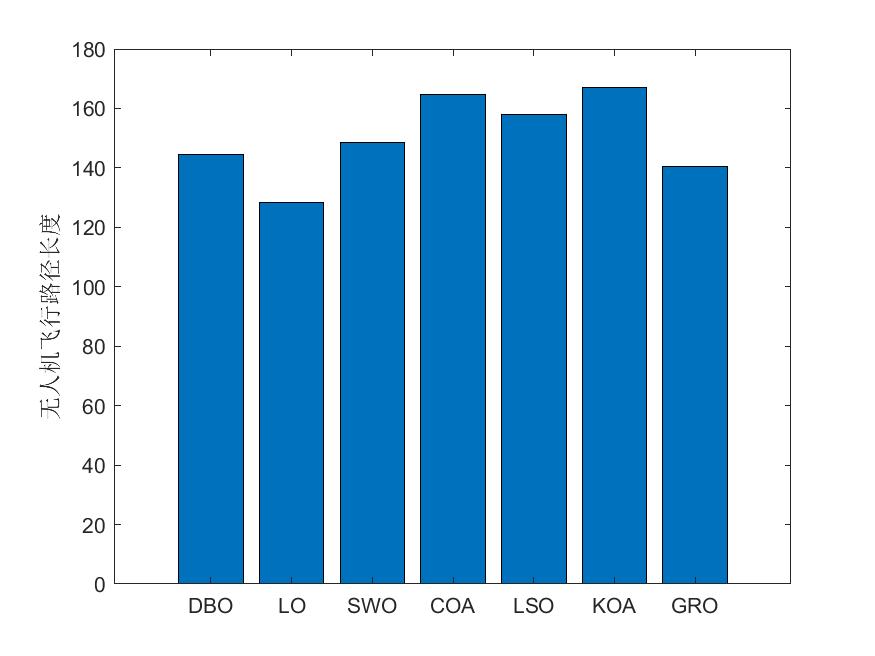
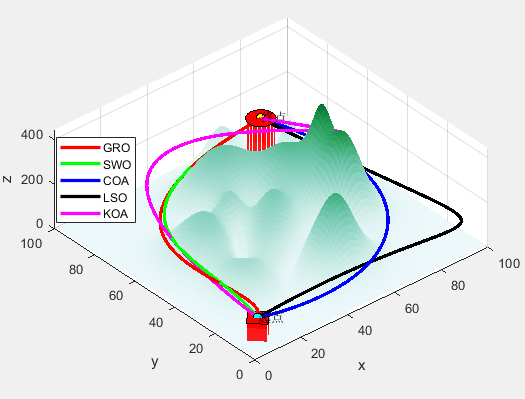
无人机航迹规划(四):七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖…
给APM固定翼增加相机
一、原因
由于要做固定翼仿真和末端视觉制导方面的工作,所以需要对APM固件的固定翼飞机添加相机模型。 对于SDF文件而言,其本质是有XML语言进行描述的,所以我们只需要对其相机的添加过程进行描述即可。
二、要求
(1)mavros和ros确保已经安装 (2)gazebo确保已经安装 (…

应急消防应用步入“繁花”时代,卓翼智能消防无人机顺势而行大有可为
近日,北京卓翼智能科技有限公司(以下简称“卓翼智能”)宣布完成超亿元B轮融资,融资金额高达2.5亿元。这个“智能无人系统”黑马品牌,凭什么出圈?重点发力在哪些领域呢?今天,带你走进…
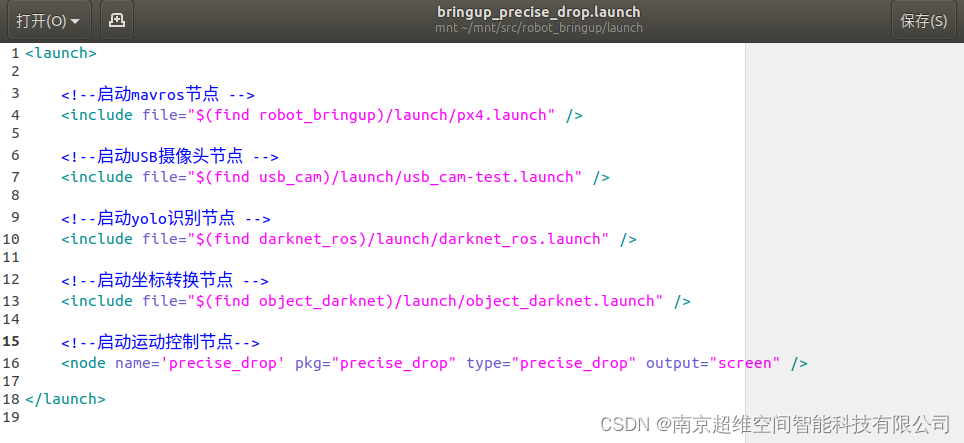
超维空间M1无人机使用说明书——61、ROS无人机物体识别与精准投放
引言:基于空中物流的项目背景。我们提供了使用基于诗句的物体识别和精准投放、降落。实现原理如下:
1、在ROS下使用机载电脑实现物体识别
2、记载电脑根据反馈的位置发布运动控制指令
3、PX4解析机载电脑发布的命令,作出运动控制
4、设置…
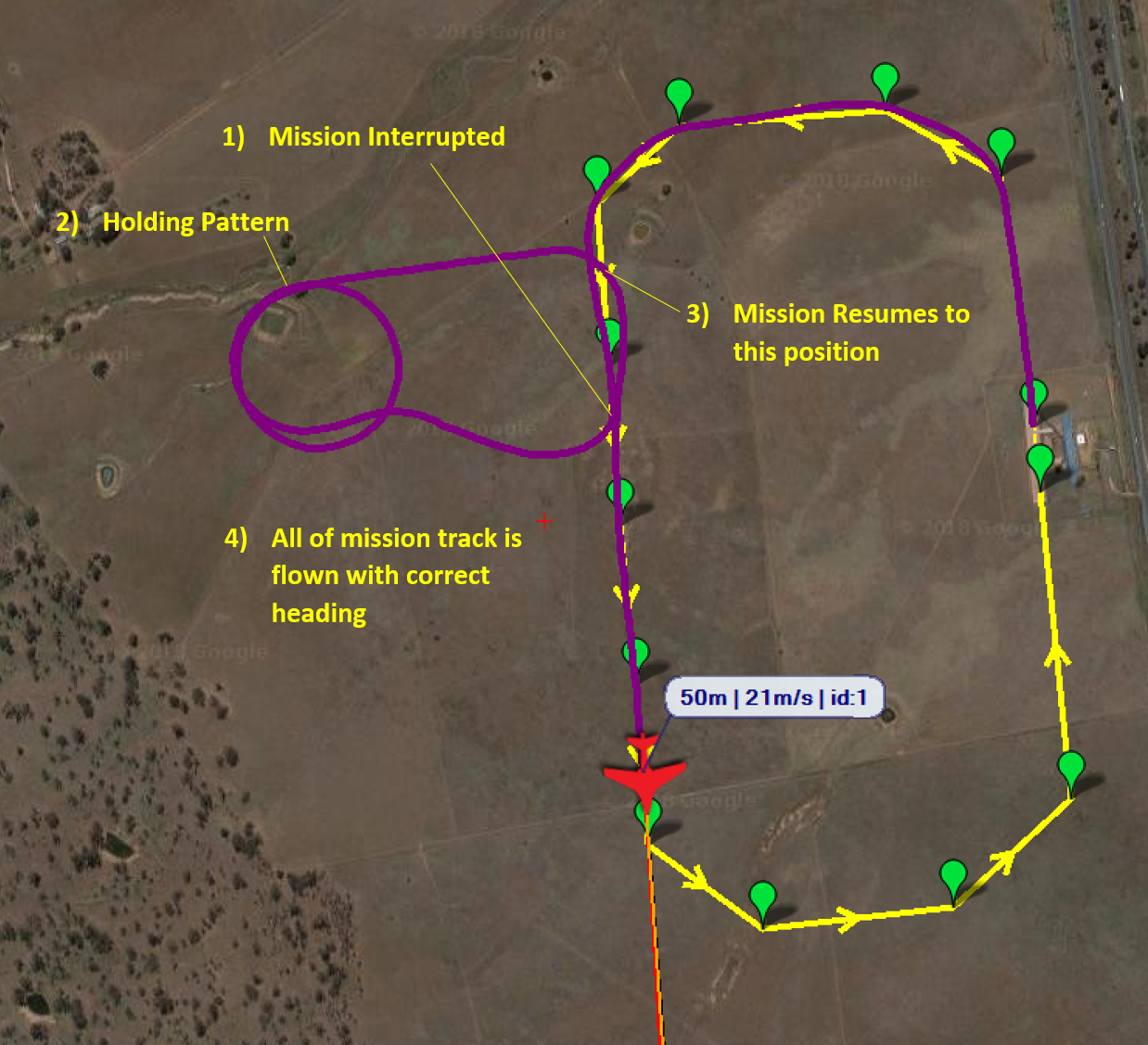
(7)(7.6) 恢复任务回放
文章目录 前言
7.6.1 配置
7.6.2 工作原理
7.6.3 局限性 前言
本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。
!Note
从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。 在某些应用或运行区域,为了消除冲突&…
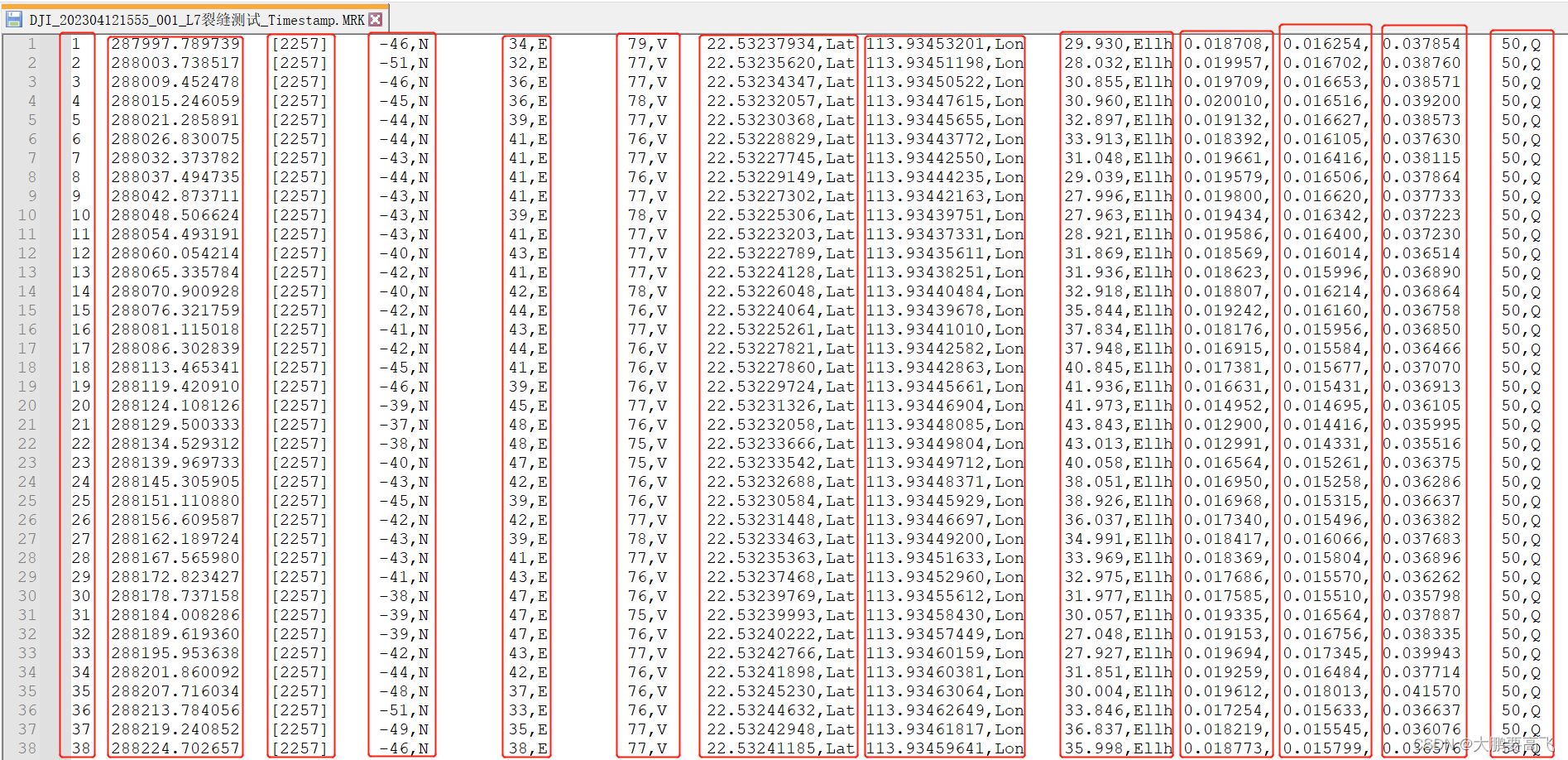
DJI RTK无人机采集后的文件分析:nav、bin、event、MRK文件
NAV文件: NAV文件是导航数据文件。它们通常存储有关飞行路径、GPS坐标、高度和其他相关数据的信息。这些数据可用于图像的地理参照、飞行分析或故障排除。
EVENT文件: EVENT文件记录了飞行过程中发生的各种事件,如无人机何时起飞,…
无人机与推流直播平台助力道路交通安全管理
一、方案背景
无人机带给人们生活的便利相信大家都深有体会,凭借着低成本、易操纵、灵活度高及可低空飞行等特点,在森林防火、物流运输、公安执法、土地测绘、消防救援等领域都已经深入应用。而且与传统的安防监控相结合后,无人机监控可移动…
硬核!江西一社区干部用无人机给居民量体温:1米内测量误差仅1%
1月29日
宜春市宜阳新区张家山先锋片区的社区干部
使用无人机
给小区居民进行远程测体温
开展防控日常登记和摸排工作 自江西省启动重大突发公共卫生事件一级响应以来,宜阳新区张家山先锋片区所有工作人员放弃休假,全部奋战在一线开展疫情防控工作。…
超维空间S2无人机使用说明书——43、将雷达定位信息通过mavros传给飞控
引言:在实现三维雷达定位后,还需要将定位数据传给飞控,这样无人机才能实现切入定点模式。无人机在有了位置以后,才能实现精确的闭环控制
简介
采用fast-lio定位算法,通过修改源码直接发布定位出来的位置信息和速度信…
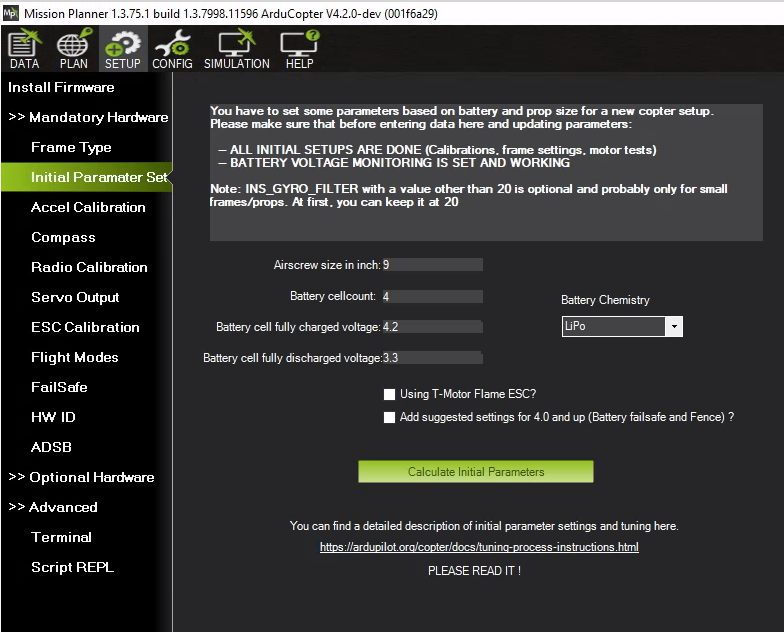
我的创作纪念日(2)设置飞机进行调优
文章目录 前言
2.1 电池设置
2.2 电机设置
2.3 PID控制器初始设置 前言
以下参数应根据你的飞机的规格正确设置。每一个都会影响调优过程的质量。 2.1 电池设置
确保你的 VTOL 电机的推力曲线尽可能的线性是非常重要的。一个线性的推力曲线意味着电机产生的实际推力的变化…
Agisoft Metashape 地面点分类参数设置
Agisoft Metashape 点云分类之地面点分类参数设置 文章目录 Agisoft Metashape 点云分类之地面点分类参数设置前言一、分类地面点参数二、农村及城区有房屋地区二、植被区域分类三、侵蚀半径(Erosion radius)参数设置前言
Agisoft Metashape提供了自动检测地面点的功能,减少…
无人机集群路径规划:淘金优化算法(Gold rush optimizer,GRO)提供MATLAB代码
一、淘金优化算法GRO
淘金优化算法(Gold rush optimizer,GRO)由Kamran Zolf于2023年提出,其灵感来自淘金热,模拟淘金者进行黄金勘探行为。 参考文献: K. Zolfi. Gold rush optimizer: A new population-ba…
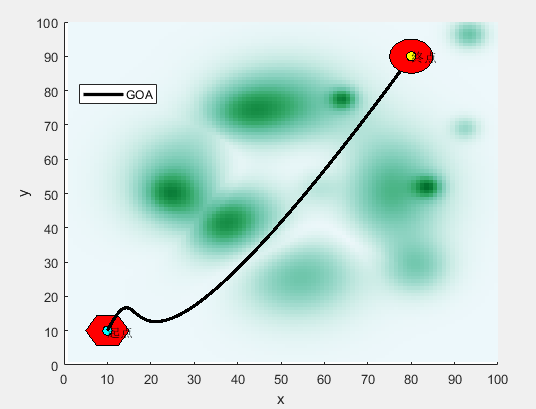
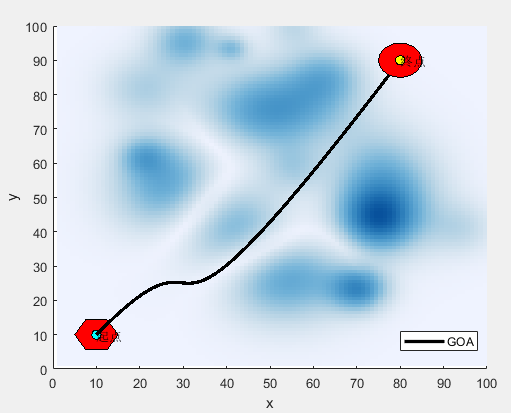
(四)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB代码)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、高尔夫优化算法GOA简介
高尔夫优化算法…

基于梯度算法的无人机航迹规划-附代码
基于梯度算法的无人机航迹规划 文章目录 基于梯度算法的无人机航迹规划1.梯度搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用梯度算法来优化无人机航迹规划。 1.梯度搜索算法
…

【AI视野·今日Robot 机器人论文速览 第七十五期】Thu, 11 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Thu, 11 Jan 2024 Totally 16 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Analytical Model and Experimental Testing of the SoftFoot: an Adaptive Robot Foot for Walking over Obstacles and Irre…
Windows电脑多开器在无人机仿真应用中的实践
随着无人机技术的不断发展,无人机仿真已经成为了无人机研究和开发的重要手段之一。但是,在进行无人机仿真时,往往需要同时运行多个仿真软件,这就需要使用多开器来实现。
Windows电脑多开器可以在一台电脑上同时运行多个软件&…

基于乌燕鸥算法的无人机航迹规划-附代码
基于乌燕鸥算法的无人机航迹规划 文章目录 基于乌燕鸥算法的无人机航迹规划1.乌燕鸥搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用乌燕鸥算法来优化无人机航迹规划。 1.乌燕鸥…

苏州渭塘镇应用无人机“智慧执法”
苏州渭塘镇应用无人机“智慧执法”
在今年以来,渭塘镇综合行政执法局采用了“空中地面”的立体监督模式,以实现对“互联网执法”工作的深入推进。在这一模式下,无人机巡查作为技术手段得到广泛应用,而安全生产监管信息系统和综合…
多旋翼无人机的悬停控制
多旋翼无人机在悬停控制方面存在一些难点。由于多旋翼无人机是通过调整螺旋桨的转速来控制姿态和位置,因此需要精确地控制各个电机的转速,以实现稳定的悬停。这需要解决以下难点:
稳定性问题:多旋翼无人机在受到风、气流等因素的…
dji uav建图导航系列()ROS中创建dji_sdk节点包(二)实现代码
在前文 【dji uav建图导航系列()ROS中创建dji_sdk节点包(一)项目结构】中简单介绍了项目的结构,和一些配置文件的代码。本文详细说明目录src下的节点源代码实现。 文章目录 1、代码结构2、PSDK部分3、ROS部分3.1、头文件3.1.1、外部调用 node_service.h3.1.2、节点类定义…

基于指数分布算法的无人机航迹规划-附代码
基于指数分布算法的无人机航迹规划 文章目录 基于指数分布算法的无人机航迹规划1.指数分布搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用指数分布算法来优化无人机航迹规划。 …
(01)ORB-SLAM2源码无死角解析-(05) Tracking::Tracking()与 Frame::Frame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
多旋翼无人机调试问题分析
一、电机和螺旋桨检查
在多旋翼无人机的调试过程中,首先需要检查电机和螺旋桨的状态。电机应转动灵活,无卡滞现象,且无明显磨损。螺旋桨应安装牢固,无松动现象,且桨叶完好无损。若发现问题,应及时更换或维…
无人机UAV目标检测与跟踪(代码+数据)
前言
近年来,随着无人机的自主性、灵活性和广泛的应用领域,它们在广泛的消费通讯和网络领域迅速发展。无人机应用提供了可能的民用和公共领域应用,其中可以使用单个或多个无人机。与此同时,我们也需要意识到无人机侵入对空域安全…

无人机系统组装与调试,多旋翼无人机组装与调试技术详解,无人机飞控系统原理
多旋翼无人机飞控系统的组装
在开始组装前,确保您已准备好所有必要的工具和材料。这包括螺丝刀、电烙铁、焊台、杜邦线、飞控板、GPS模块、电机、桨叶等。
飞控安装
安全开关安装,将安全开关固定在机架上。将安全开关的线插到飞控SWITCH插口上。 电调…
Drone-Yolo:一种高效的无人机图像目标检测神经网络方法
摘要
https://www.mdpi.com/2504-446X/7/8/526 在各种研究领域中,对无人机的图像进行目标检测是一项有意义的任务。然而,无人机的图像带来了独特的挑战,包括图像尺寸大、检测对象尺寸小、对象密集分布、对象重叠以及光线不足影响目标检测的准确性。本文提出了Drone-YOLO,这…
1280×1024分辨率大画幅热红外三光AI无人机吊舱
LTIS505型1280热红外三光无人机吊舱是利卓公司结合了红外热成像、可见光相机与激光测距为一体的产品。
产品支持双波段成像,可以同时输出高清热红外与可见光视频,带有激光测距,可支持扩展AI目标识别跟踪功能。
热红外支持12801024大画幅热…
无人机巡逻喊话、疫情排查、送药消毒,抗疫战中机器人化身钢铁战士!
这场抗疫战争似乎格外漫长,但回头细数一下才发现,自疫情爆发以来,也不过半月之久。在接下来的几个半月中,抗疫战仍将继续,各方力量也要绷紧神经继续战斗。
值得一提的是,在这场全民抗战中,我们…
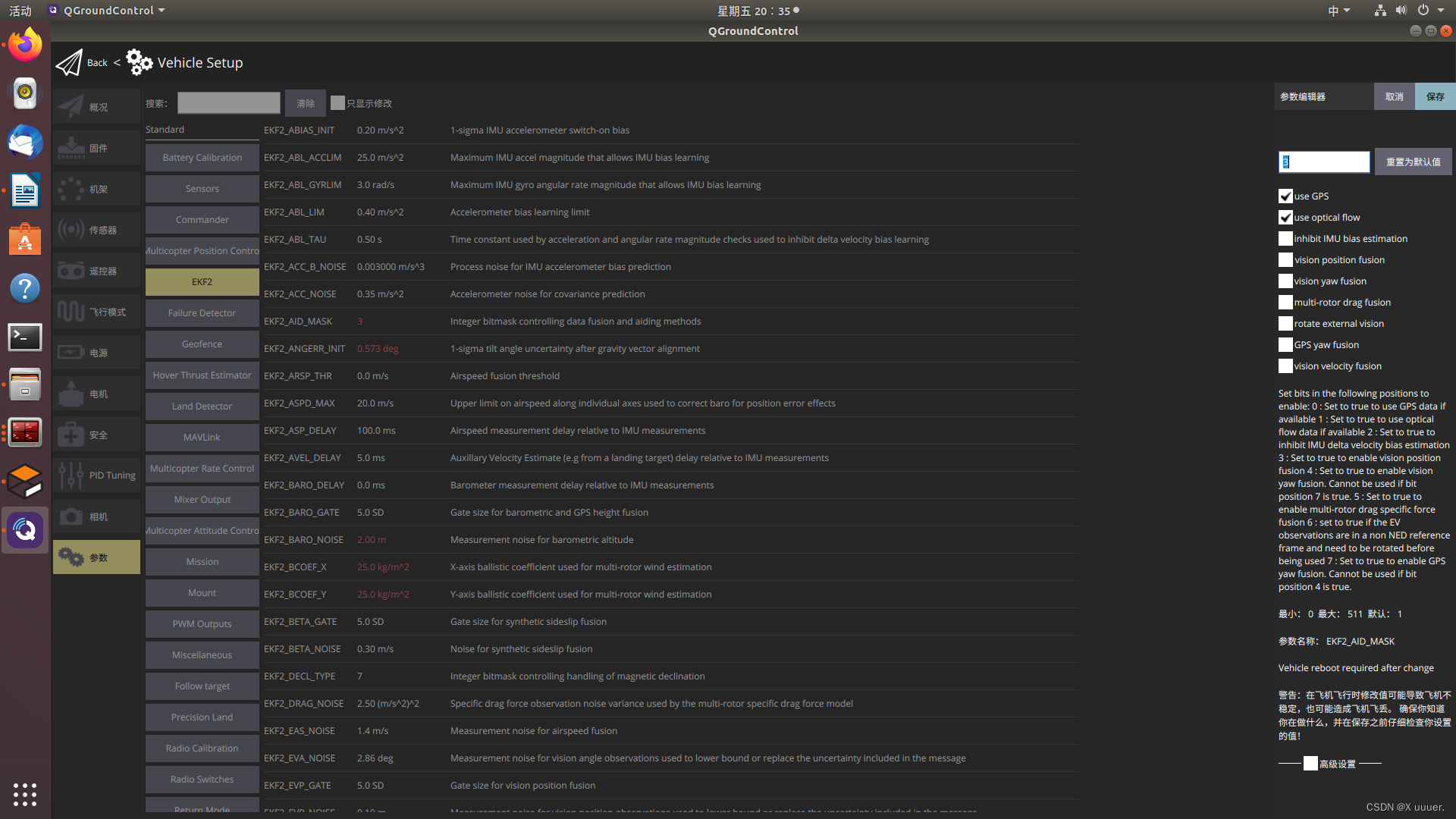
xtdrone用键盘控制无人机飞行 无法起飞
运行案例 解锁无人机螺旋桨转动但无法起飞 也未报错
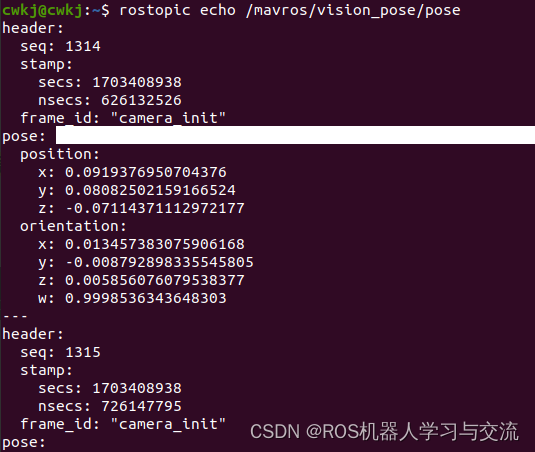
解决方法:
在QGC中修改:PX4飞控EKF配置 将PX4使用的EKF配置为融合GPS的水平位置与气压计高度。 如果我们想使用视觉定位,就需要把修改配置文件。 此修改意味着EKF融合来自mavros/vision_…
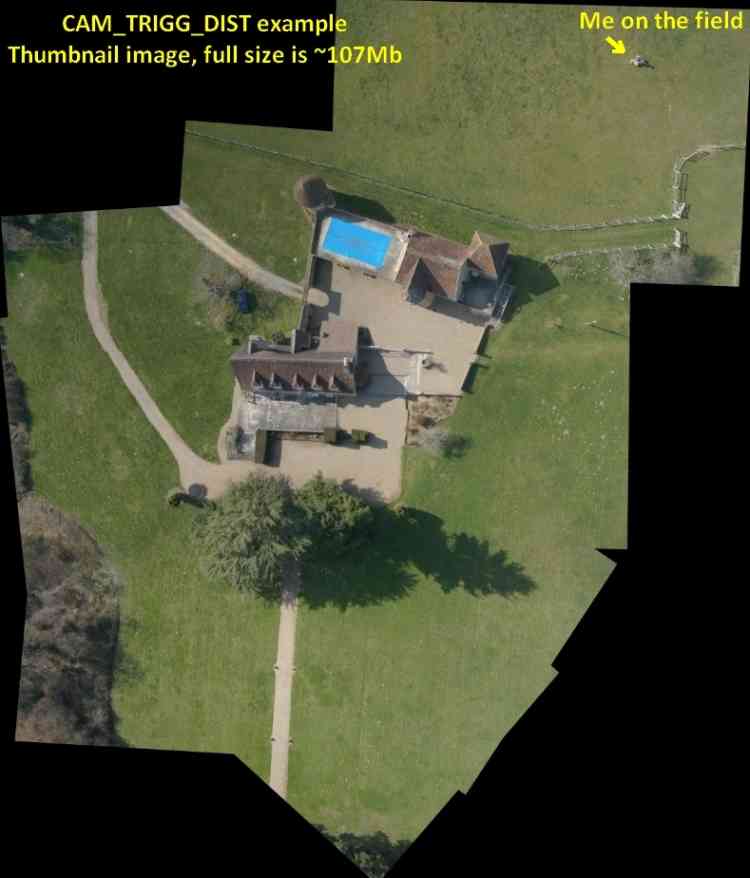
(7)(7.3) 自动任务中的相机控制
文章目录 前言
7.3.1 概述
7.3.2 自动任务类型
7.3.3 创建合成图像 前言
本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal hav…
强化学习应用(四):基于Q-learning的无人机物流路径规划研究(提供Python代码)
一、Q-learning简介
Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的问题。它通过学习一个价值函数来指导智能体在环境中做出决策,以最大化累积奖励。
Q-learning算法的核心思想是通过不断更新一个称为Q值的…

基于跳蛛算法的无人机航迹规划-附代码
基于跳蛛算法的无人机航迹规划 文章目录 基于跳蛛算法的无人机航迹规划1.跳蛛搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用跳蛛算法来优化无人机航迹规划。 1.跳蛛搜索算法
…

基于蜉蝣算法的无人机航迹规划-附代码
基于蜉蝣算法的无人机航迹规划 文章目录 基于蜉蝣算法的无人机航迹规划1.蜉蝣搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用蜉蝣算法来优化无人机航迹规划。 1.蜉蝣搜索算法
…

XTDrone PX4 仿真平台|Ubuntu20.04 环境搭建失败记录
XTDrone PX4 仿真平台|Ubuntu20.04 环境搭建失败记录仿真环境搭建依赖安装ROS安装Gazebo安装MAVROS安装PX4配置仿真环境搭建
依赖安装
在使用apt安装的过程中(包括之后ROS的安装),如果出现难以解决的依赖问题,可以使用aptitude …
无人机在电力巡检中的应用
随着电力行业对电网安全需求的不断提升,传统的人工巡检方式逐渐凸显出劳动强度大、效率低的问题。这种状况迫使我们寻找更为高效和先进的解决方案。与传统方式相反,无人机的广泛应用为电力巡检注入了全新的活力。 一、电力巡检现存挑战:劳动强…
提高多旋翼无人机的悬停控制精度
要提高多旋翼无人机的悬停控制精度,可以从以下几个方面进行优化:
优化传感器配置:选用高精度的传感器,如激光雷达、红外传感器等,可以提供更准确的姿态和位置信息。同时,对传感器进行定期标定和校准&#…
轻型民用无人机驾驶航空器安全操控——理论考试多旋翼部分笔记
今天已经可以在线考取轻型民用无人机驾驶航空器执照了,所以我也在在线观看完视频之后整理了如下的知识点,所有知识点全部来自UOM平台。
目录
航空器知识
(1)多旋翼民用无人驾驶航空器螺旋桨的作用
(2&#x…

山东淄博刑侦大队利用无人机抓获盗窃团伙
山东淄博刑侦大队利用无人机抓获盗窃团伙
近期,山东淄博临淄区发生多起盗窃案件。通过视频追踪和调查访问,推断临淄区某村可能为嫌疑人藏匿地点。刑侦大队无人机应急小组迅速到达现场,经无人机高空侦查,发现并锁定了嫌疑人的藏匿…
一体化步进电机在无人机自动机场的应用
1.介绍
无人机自动机场,具备无人机存储以及放飞回收、充能功能,可将无人机直接布置到作业现场,解决人工携带无人机通勤的问题,可增强无人机应急作业能力,工作效率得到大幅提升。
不工作时,无人机待机在自…
(六)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB代码)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、高尔夫优化算法GOA简介
高尔夫优化算法…

如何应对雨天飞行的挑战?无人机机库防护能力解析
一、 背景介绍
无人机机库是无人机停放和起降场所,类似传统飞机的 hangar(飞机库)。它是一个专门用于存储、维护和保护无人机的设施。无人机机库的存在有助于提高无人机的安全性,同时也为无人机提供了一个有序的管理场所。 雨天…
11.机器人系统仿真搭建gazebo环境、仿真深度相机、雷达、RGB相机
目录 1 gazebo仿真环境搭建
1.1 直接添加内置组件创建仿真环境
1.2 urdf、gazebo、rviz的综合应用
2 ROS_control
2.1 运动控制实现流程(Gazebo)
2.1.1 已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加传动装置以及控制器
…

基于乌鸦算法的无人机航迹规划-附代码
基于乌鸦算法的无人机航迹规划 文章目录 基于乌鸦算法的无人机航迹规划1.乌鸦搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用乌鸦算法来优化无人机航迹规划。 1.乌鸦搜索算法
…
竞赛无人机搭积木式编程(四)---2023年TI电赛G题空地协同智能消防系统(无人机部分)
竞赛无人机搭积木式编程(四)
---2023年TI电赛G题空地协同智能消防系统(无人机部分)
无名小哥 2023年9月15日
赛题分析与解题思路综述 飞控用户在学习了TI电赛往届真题开源方案以及用户自定义航点自动飞行功能方案讲解后&#x…

px4仿真实现无人机自主飞行
一,确定消息类型
无人机通过即在电脑是现自主飞行:思路如下。 通过Mavros功能包,将ROS消息转换为Mavlink消息。实现对无人机的控制。
几种消息之间的关系如下: 对于ROS数据,就是我们机载电脑执行ROS系统的数据。 对于Mavros消息,就是Mavros功能包内部的消息。查询网站…

Windows系统C++语言环境下通过SDK进行动作捕捉数据传输
NOKOV度量动作捕捉系统可以与市面上主流的操作系统和编程语言实现通信。可以在Windows系统C语言环境下通过SDK进行动作捕捉数据传输。
一、形影软件设置
1、实时模式和后处理模式都可以通过SDK传输数据。以后处理模式为例。将模式切换到后处理模式 2、加载一个刚体数据 3、打…

基于鱼鹰算法的无人机航迹规划-附代码
基于鱼鹰算法的无人机航迹规划 文章目录 基于鱼鹰算法的无人机航迹规划1.鱼鹰搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用鱼鹰算法来优化无人机航迹规划。 1.鱼鹰搜索算法
…
![2023年中国无人机环保监测产业链及市场规模分析[图]](https://img-blog.csdnimg.cn/img_convert/84a05af5f04d8a585eb10ae21bf7d0a7.png)
2023年中国无人机环保监测产业链及市场规模分析[图]
无人机环保监测是无人机应用场景的重要组成部分,无人机环保监测为通过无人机飞行平台,搭载环保监测仪器进行大气环境、水环境、生态环境监测的一种环境监测模式。
无人机环保监测分类 资料来源:共研产业咨询(共研网) …

YOLO目标检测——无人机航拍输电线路绝缘瓷瓶数据集下载分享【对应voc、coco和yolo三种格式标签】
实际项目应用:电力系统运维、状态监测与故障诊断、智能电网建设等领域数据集说明:无人机航拍输电线路绝缘瓷瓶数据集,真实场景的高质量图片数据,数据场景丰富标签说明:使用lableimg标注软件标注,标注框质量…

基于Kresling折纸结构双稳态空间的无人机着陆系统新结构
摘要:本文利用动捕技术对无人机着陆系统模型进行动力学分析,对折纸结构双稳态着陆系统性能进行测试,为无人机着陆系统结构设计提供创新方法。 近期,一篇关于无人机着陆系统的研究论文“Evolution of UAV landing structures in th…

YOLO目标检测——无人机检测数据集下载分享【含对应voc、coco和yolo三种格式标签】
实际项目应用:无人机识别数据集说明:无人机检测数据集,真实场景的高质量图片数据,数据场景丰富标签说明:使用lableimg标注软件标注,标注框质量高,含voc(xml)、coco(json)和yolo(txt)三种格式标签…

基于人工蜂群算法的无人机航迹规划-附代码
基于人工蜂群算法的无人机航迹规划 文章目录 基于人工蜂群算法的无人机航迹规划1.人工蜂群搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用人工蜂群算法来优化无人机航迹规划。 …
2023年五一数学建模 | 第二十届五一数学建模A题:无人机定点投放问题思路
2023年五一数学建模 | 第二十届五一数学建模A题:无人机定点投放问题思路 目录 2023年五一数学建模 | 第二十届五一数学建模A题:无人机定点投放问题思路基本介绍问题1:问题2:基本介绍
随着科学技术的不断发展,无人机在许多领域都有着广泛的应用。对于空中执行定点投放任务…

世界前沿技术发展报告2023《世界航空技术发展报告》(七)机载系统与武器技术
(七)机载系统与武器技术 1.机载系统技术1.1 美国推进商用5G技术在航空装备中的应用1.2 人工智能技术在航空中的应用日益增多1.3 美国空军研究实验室推出综合座舱感知技术1.4 美国空军为固定翼飞机驾驶员选定新一代头盔1.5 美国DARPA探索通过机载光能量中…
美团——城市低空物流无人机的设计挑战与应对
城市低空物流无人机的设计挑战与应对
强度分析 振动影响 动力设计 噪声设计 冗余备份更加性价比,便宜好实现
航电系统 动力系统的冗余 电池系统的冗余 通讯系统等冗余 降落冗余 安全降落 计算高效 产线标定 底层基础库 离线系统 行业公开测评 未来展望 –
导航定…
(1)(1.13) SiK无线电高级配置(七)
文章目录
前言
17 技术细节
18 名词解释 前言
本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 17 技术细节 在评估该无线电是否符合当地法规时,了解其使用的技术可能会有所帮…

无人机图像识别技术研究及应用,无人机AI算法技术理论,无人机飞行控制识别算法详解
在现代科技领域中,无人机技术是一个备受瞩目的领域。随着人们对无人机应用的需求在不断增加,无人机技术也在不断发展和改进。在众多的无人机技术中,无人机图像识别技术是其中之一。 无人机图像识别技术是利用计算机视觉技术对无人机拍摄的图像…
UAV | 多算法在多场景下的无人机路径规划(Matlab)
近年来,无人机(unmanned aerial vehicle,UAV)由于其灵活度高、机动性强、安全风险系数小、成本低等特点,被广泛应用于搜索巡逻、侦察监视、抢险救灾、物流配送、电力巡检、农业灌溉等军用或民用任务。路径规划是无人机执行任务的关键…
超维空间S2无人机使用说明书——11、使用3维激光雷达实现ROS无人机的精准定位
引言:在工程应用中,往往需要在没有GPS信号的情况下实现无人机的资助或者稳定的飞行。实现这个的基础就是定位,有了准确的定位信息,无人机才能稳定的飞行。性比较于视觉定位效果,目前3D雷达相对更加稳定,视觉…
物流无人机在哪些场景最适合应用?
物流无人机在多种场景中都有应用潜力,以下是一些最适合的应用场景:
偏远地区配送:在偏远地区,传统配送方式成本高昂且效率低下,而物流无人机则可以通过空中航线直接送达目的地,大大缩短了配送时间和成本。…

基于树种算法的无人机航迹规划-附代码
基于树种算法的无人机航迹规划 文章目录 基于树种算法的无人机航迹规划1.树种搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用树种算法来优化无人机航迹规划。 1.树种搜索算法
…
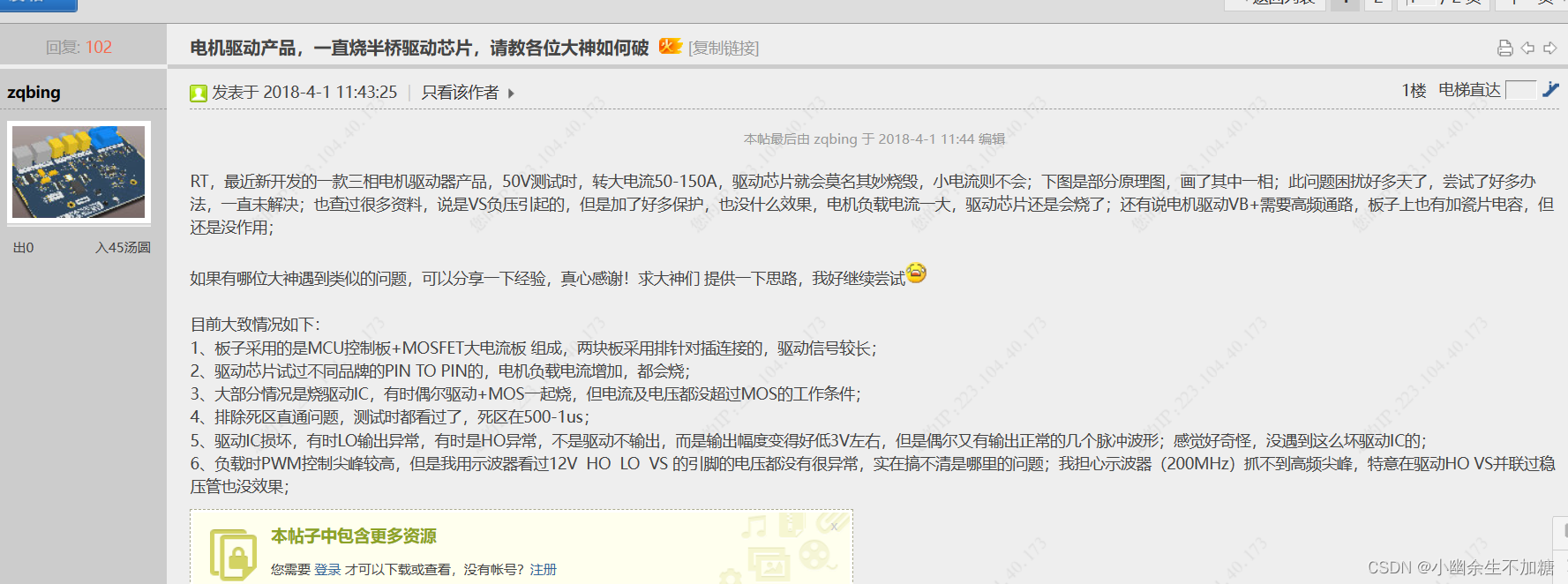
Buck电源设计常见的一些问题(一)半桥栅极驱动芯片共性失效问题
(一)半桥栅极驱动芯片共性失效问题 1.常用的半桥驱动芯片特点2.自举电容的选取3.栅极驱动芯片失效问题3.1 VDD噪声和脉冲3.2 输入负电压脉冲3.3 输出电压脉冲3.4 HS引脚负压失效半桥驱动芯片主要用在器件可应用于电信,数据通信,便携式存储或更低电压系统中的电源转换器,半…

酷雷曼第二期无人机技能培训圆满举办
第2期无人机技能培训
2023年8月24日-8月25日,第二期酷雷曼无人机技能培训及执照考试在北京圆满举办,来自五湖四海、全国各地的合作商千里相聚,培训现场热闹融洽,再续精彩盛况。
随着《无人驾驶航空器飞行管理暂行条例》正式发布…

(八)五种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、五种算法(DBO、LO、SWO、COA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为…

基于旗鱼算法的无人机航迹规划-附代码
基于旗鱼算法的无人机航迹规划 文章目录 基于旗鱼算法的无人机航迹规划1.旗鱼搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用旗鱼算法来优化无人机航迹规划。 1.旗鱼搜索算法
…

成都无人机测绘公司 无人机测绘服务 无人机航测作业
无人机测绘是传统航空摄影测量方式的重要补充方式,它具有灵活、高效、适用范围广、生产周期短等优势,在小区域和飞行困难地区获取高分辨率图像具有明显的优势。目前,无人机测绘主要应用于土地监管、灾害应急处理、城市规划管理等方面。那么&a…

树莓派连接NOKOV接收动作捕捉数据:通过SDK进行
NOKOV度量动作捕捉系统支持通过SDK与树莓派通信,将动作捕捉数据实时传输给树莓派。
一、形影软件设置
1、首先打开形影动捕软件,加载一段后处理数据。这里选择了一段小车飞机的协同数据。 在这个数据里面可以看到,整个场景里面有两个刚体&a…

基于蝙蝠算法的无人机航迹规划-附代码
基于蝙蝠算法的无人机航迹规划 文章目录 基于蝙蝠算法的无人机航迹规划1.蝙蝠搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用蝙蝠算法来优化无人机航迹规划。 1.蝙蝠搜索算法
…
(六)七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…

固定翼无人机培训第二周总结——多轴和起降
博主学的III类固定翼垂直起降无人机,起降采用多旋翼(下图中红框就是旋翼),巡航采用固定翼。 理论大部分也是多旋翼,多轴旋翼无人机是指三个旋翼轴及以上的特殊直升机,多旋翼无人机靠旋翼速度和方向来控制无…

无人机飞控算法原理基础研究,多旋翼无人机的飞行控制算法理论详解,无人机飞控软件架构设计
多旋翼无人机的飞行控制算法主要涉及到自动控制器、捷联式惯性导航系统、卡尔曼滤波算法和飞行控制PID算法等部分。 自动控制器是无人机飞行控制的核心部分,它负责接收来自无人机传感器和其他系统的信息,并根据预设的算法和逻辑,对无人机的姿…
(三)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB代码)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、高尔夫优化算法GOA简介
高尔夫优化算法…

电子眼+无人机构建平安城市视频防控监控方案
电子眼(也称为监控摄像机)可以通过安装在城市的不同角落,实时监控城市的各个地方。它们可以用于监测交通违法行为、监控公共场所的安全以及实时监测特定区域的活动情况。通过电子眼的应用,可以帮助警方及时发现并响应各类安全事件…
【番外】在Windows安装Airsim/UE4踩坑合集
在Windows安装Airsim/UE4踩坑合集 1.安装过程中一定要确保Epic Games Launcher是英文环境,保存路径什么的也尽量是英文。2.UE4中的虚幻引擎一定要安装4.27版本以上的,不然的话最后运行vs的时候会报语法错误,网上根本查不到的那种错误。换了版…
RflySim | 滤波器设计实验二
本讲是关于无人机滤波器,其中包括无人机滤波器简介、测量原理、线性互补滤波器设计、线性互补滤波器参数分析、卡尔曼滤波器设计等。 滤波器设计实验2 卡尔曼滤波器是一种递推线性最小方差估计算法,它的最优估计需满足以下三个条件:
1&#…
“华为杯”研究生数学建模竞赛2016年-【华为杯】A题:无人机在抢险救灾中的优化运用(附获奖论文及MATLAB代码实现)
目录 摘 要: 1. 问题重述 1.1. 问题背景 1.2. 需要解决的问题 1.2.1.

无人机管控平台:打破通信限制 助力灾害救援
中国地域广阔,自然灾害频发,时常对通信基础设施造成破坏,传统无人机在紧急救援中受限。为有效解决这一问题,新一代无人机技术与应急通信系统融合形成无人机管控平台,不仅提供了高效的空中监测技术,还配备先…
多无人机编队避障(人工势场法)
matlab2020正常运行,预设编队类型,目标位置,障碍物
多无人机编队避障(人工势场法)资源-CSDN文库
无人机摄像头改造记录
23年5月,改造4G远控车时,因为要用到摄像头模组,早年的摄像头都是 usb 接口输出 mjpg 格式数据,近几年因为无人机的流行,国内很多厂商在原本 usb 摄像头硬件基础上,叠加了一个物联网 wifi 芯片,用…
工业无人机行业研究:预计2025年将达到108.2亿美元
近年来,在技术进步和各行各业对无人驾驶飞行器 (UAV) 不断增长的需求的推动下,工业无人机市场一直在快速增长。该市场有望在未来几年继续其增长轨迹,许多关键趋势和因素推动其发展。 在全球范围内,工业无人机市场预计到 2025 年将…
常用的数字高程模型(DEM)数据介绍,附免费下载
常用的数字高程模型(DEM)数据:
ETOPO(1.8千米) ETOPO是一种地形高程数据,由NGDC美国地球物理中心发布,与大多数高程数据不同的是,它还包含海底地形数据。
SRTM15(450…

智能安防无人机——一种安防巡检新方案
在高新技术的推动下,安防无人机在监控、巡逻等领域的使用频率越来越高,逐渐成为安防救援的重要帮手。安防无人机作为城市安全应急保障体系的重要组成部分,在未来将变得不可或缺。 一、安防无人机的定义及构成
复亚智能无人机全自主巡飞系统由…

yolov5无人机视频检测与计数系统(创新点和代码)
标题:基于YOLOv5的无人机视频检测与计数系统
摘要:
无人机技术的快速发展和广泛应用给社会带来了巨大的便利,但也带来了一系列的安全隐患。为了实现对无人机的有效管理和监控,本文提出了一种基于YOLOv5的无人机视频检测与计数系…

强化学习应用(八):基于Q-learning的无人机物流路径规划研究(提供Python代码)
一、Q-learning简介
Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的问题。它通过学习一个价值函数来指导智能体在环境中做出决策,以最大化累积奖励。
Q-learning算法的核心思想是通过不断更新一个称为Q值的…

(6)蜂鸣器(又称音调报警)
文章目录
6.1 使用有源蜂鸣器而不是无源蜂鸣器
6.2 安装蜂鸣器
6.3 使蜂鸣器安静 蜂鸣器(或音调报警器)可用于以声音指示飞行器的状态变化。根据电路板的能力,它可以是一个有源设备(只需要施加电压来产生一个单一频率的音调&am…
【番外】【Airsim in Windows ROS in WSL2-Ubuntu20.04】环境配置大全
【番外】【Airsim in Windows &ROS in WSL2-Ubuntu20.04】环境配置大全 【前言(可省略不看)】1.在windows上面部署好UE4AirSim联合仿真环境2.在windows上面部署wsl2系统以及在wsl2上面部署ubuntu系统3.安装好ubuntu系统之后,目前只能在命…
超维空间S2无人机使用说明书——41、使用3维雷达进行室内定位——仿真篇(跑数据集)
引言:为了提高无人机室内定位的稳定性和多种定位方案,S系列无人机推出了基于三维雷达激光点云数据的定位方案。该方案的提出是为了改善视觉定位容易受到光照等影响导致的位置漂移。
简介
定位采用fast-lio定位算法,通过修改源码直接发布定位…
超维空间S2无人机使用说明书——31、使用yolov8进行目标识别
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C的yolov3和yolov4,以及yolov7。
简介,为了提高识别速度,系统采用了G…
(二)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、高尔夫优化算法GOA简介
高尔夫优化算法…

基于变色龙算法的无人机航迹规划-附代码
基于变色龙算法的无人机航迹规划 文章目录 基于变色龙算法的无人机航迹规划1.变色龙搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用变色龙算法来优化无人机航迹规划。 1.变色龙…

三位一体,铸就无敌铁军!海陆空协同,开启集群新篇章!
在机器人领域,多机器人系统的研究一直是一大热点,众多高校与研究所逐步投入到机器人集群系统的研究当中,其中无人机编队表演、无人车群园区运输、无人船集群水域监测等集群应用更是进入了大众的视野。但对多机器人集群系统的需求却远不止于此…

(2)(2.9) Holybro Microhard P900无线电遥测设备
文章目录
前言
1 特点
2 规格
3 包装内包括 前言
Holybro Microhard Radio 集成了 microhard Pico 系列射频模块,能够在强大的拓扑结构中提供高性能无线串行通信,如点对点、点对多点和安全 Mesh(P840 不提供 Mesh)。 它采用跳…
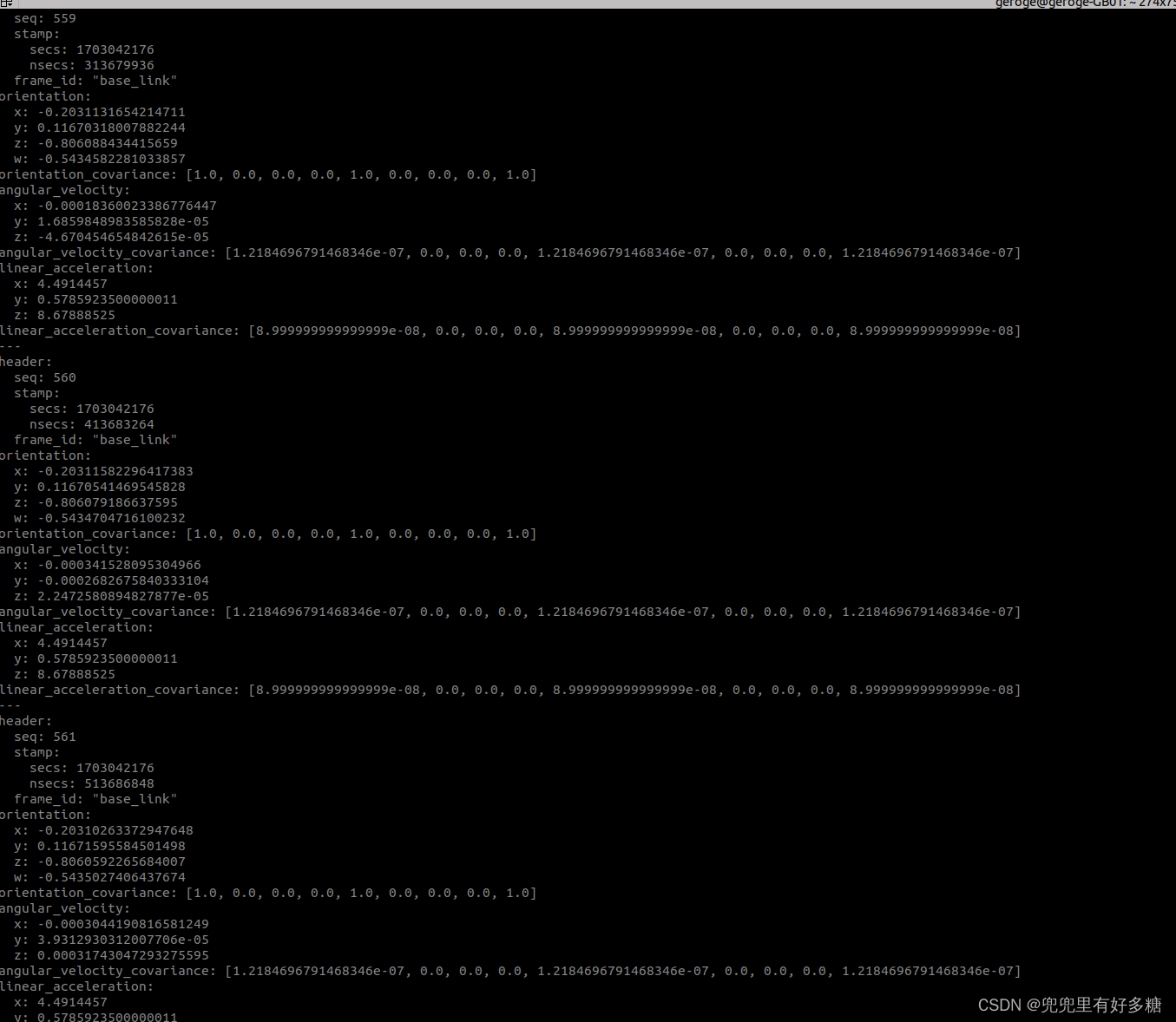
【无人机学习篇】构建mavros机载电脑连接,从机载电脑获取pixhawk数据
(本文基于的pixhawk版本:6X minibase V2.2 ,固件:apm) 整个的步骤(baseline): 具体的每一步都可以在网上查到教程,这里只是梳理出一个流程。并且ubantu与ros的版本也不是…

(1)(1.9) MSP (version 4.2)
文章目录
前言
1 协议概述
2 配置
3 参数说明 前言
ArduPilot 支持 MSP 协议,可通过任何串行端口进行遥测、OSD 和传感器。这样,ArduPilot 就能将遥测数据发送到 MSP 兼容设备(如大疆护目镜),用于屏幕显示&#x…

世界前沿技术发展报告2023《世界航空技术发展报告》(四)无人机技术
(四)无人机技术 1.无人作战飞机1.1 美国空军披露可与下一代战斗机编组作战的协同式无人作战飞机项目1.2 俄罗斯无人作战飞机取得重要进展 2.支援保障无人机2.1 欧洲无人机项目通过首个里程碑2.2 美国海军继续开展MQ-25无人加油机测试工作 3.微小型无人机…
无人机路径优化(八):五种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、五种算法(DBO、LO、SWO、COA、GRO)简介
1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为的启发…

基于人工蜂鸟算法的无人机航迹规划-附代码
基于人工蜂鸟算法的无人机航迹规划 文章目录 基于人工蜂鸟算法的无人机航迹规划1.人工蜂鸟搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用人工蜂鸟算法来优化无人机航迹规划。 …

无人机自主巡检是什么?如何实现自动巡检?
近年来,随着科技不断演进,无人机自主巡检技术在多个领域取得显著进展。那么,无人机自主巡检到底是什么?它又是如何实现自动化的呢? 一、无人机自主巡检的定义
无人机自主巡检技术是利用无人机对目标对象或区域进行巡检…
无人机遥感在农林信息提取中的实现方法与GIS融合制图教程
详情点击链接:无人机遥感在农林信息提取中的实现方法与GIS融合制图
遥感技术作为一种空间大数据手段,能够从多时、多维、多地等角度,获取大量的农情数据。数据具有面状、实时、非接触、无伤检测等显著优势,是智慧农业必须采用的重…
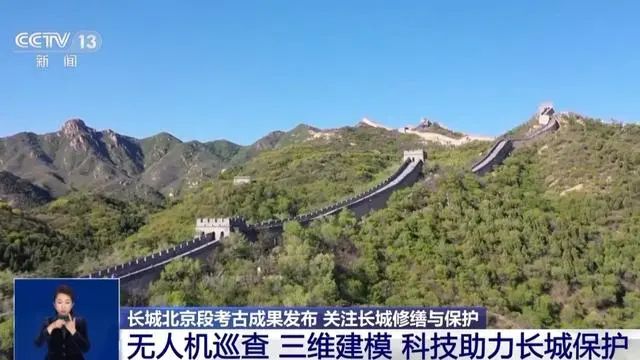
长城之上的无人机:文化遗产的守护者
长城之上的无人机:文化遗产的守护者 在八达岭长城景区,两架无人机分别部署在了长城的南、北楼两点。根据当前的保护焦点和需求,制定了5条无人机综合巡查航线,以确保长城景区的所有开放区域都能得到有效监管。每天,无人…
12.06 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 美团北斗计划持续招募中(内推)
校招 | 美团北斗计划持续招募中(内推) 2、校招 | 京东2024校招这些岗位持续热招中(内推…

(1)(1.8) MSP(MultiWii 串行协议)(4.1 版)
文章目录
前言
1 协议概述
2 配置
3 参数说明 前言
ArduPilot 支持 MSP 协议,可通过任何串行端口进行遥测和传感器。这允许 ArduPilot 将其遥测数据发送到 MSP 兼容设备(如大疆护目镜),用于屏幕显示(OSDÿ…
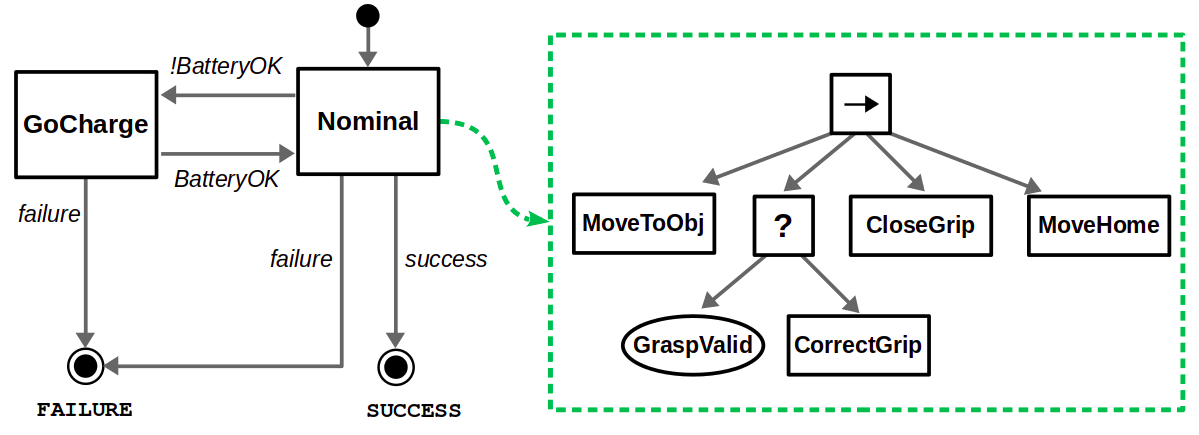
行为树保姆级教程(以机器人的任务规划为例
行为树
目录
什么是行为树(behavior tree)?行为树的相关术语 行为节点和控制节点不同类型的控制结点: 顺序节点选择节点并行节点装饰结点 机器人的例子:物体搜索 1:如果只存在一个地点A,那么行为树很简单࿰…

基础实验篇 | QGC实时调整控制器参数实验
PART 1
实验名称及目的
QGC实时调整控制器参数实验:在进行硬件在环仿真和真机实验时,常常需要在QGC地面站中观察飞行状态,并对控制器参数进行实时调整,以使得飞机达到最佳的控制效果,但是,在Simulink中设…

让智慧城市更进一步,无人机解决方案全面应用
在城市规划中,无人机正在颠覆传统的操作和思维方式。这种技术不仅改变了城市管理获取和分析信息的方式,还提供了前所未有的视角,使城市管理能够更加明智地制定策略。 1. 数据采集的新纪元:
城市规划的核心在于数据的收集和分析。…

(32)测距仪(声纳、激光雷达、深度摄影机)
文章目录
前言
32.1 单向测距仪
32.2 全向性近距离测距仪
32.3 基于视觉的传感器 前言
旋翼飞机/固定翼/无人车支持多种不同的测距仪,包括激光雷达(使用激光或红外线光束进行距离测量)、360 度激光雷达(可探测多个方向的障碍…

交通强国添力量 无人机巡航为何备受期待?
在高速建设交通强国的过程中,交通运输部海事局计划完善“陆海空天”一体化水上交通运输安全保障体系。无人机巡航系统将在提升海事船舶监管和水上搜救能力方面发挥关键作用,以构建更为全面的监管体系。尽管已初步建立了海事监管体系,但仍存在…
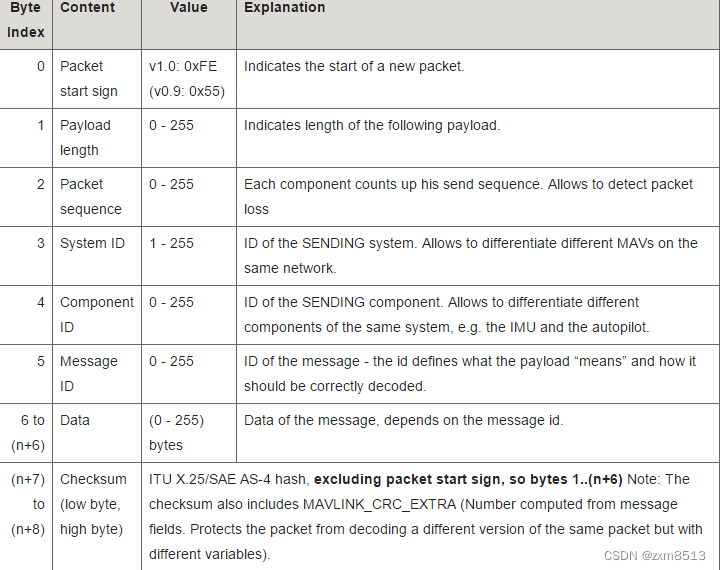
无人机通信协议MAVLink简介
Micro Air Vehicle Link(简称MAVLink)用于无人系统(例如,机器人、无人机、无人车、无人船和无人潜航器)。它定义了一组无人系统和地面站之间的消息交换规则。此协议广泛用于无人驾驶系统中,特别是ArduPilot和PX4无人驾驶系统,MAVLink协议提供了强大的功能,不仅用于监视…

基于萤火虫算法的无人机航迹规划-附代码
基于萤火虫算法的无人机航迹规划 文章目录 基于萤火虫算法的无人机航迹规划1.萤火虫搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用萤火虫算法来优化无人机航迹规划。 1.萤火虫…
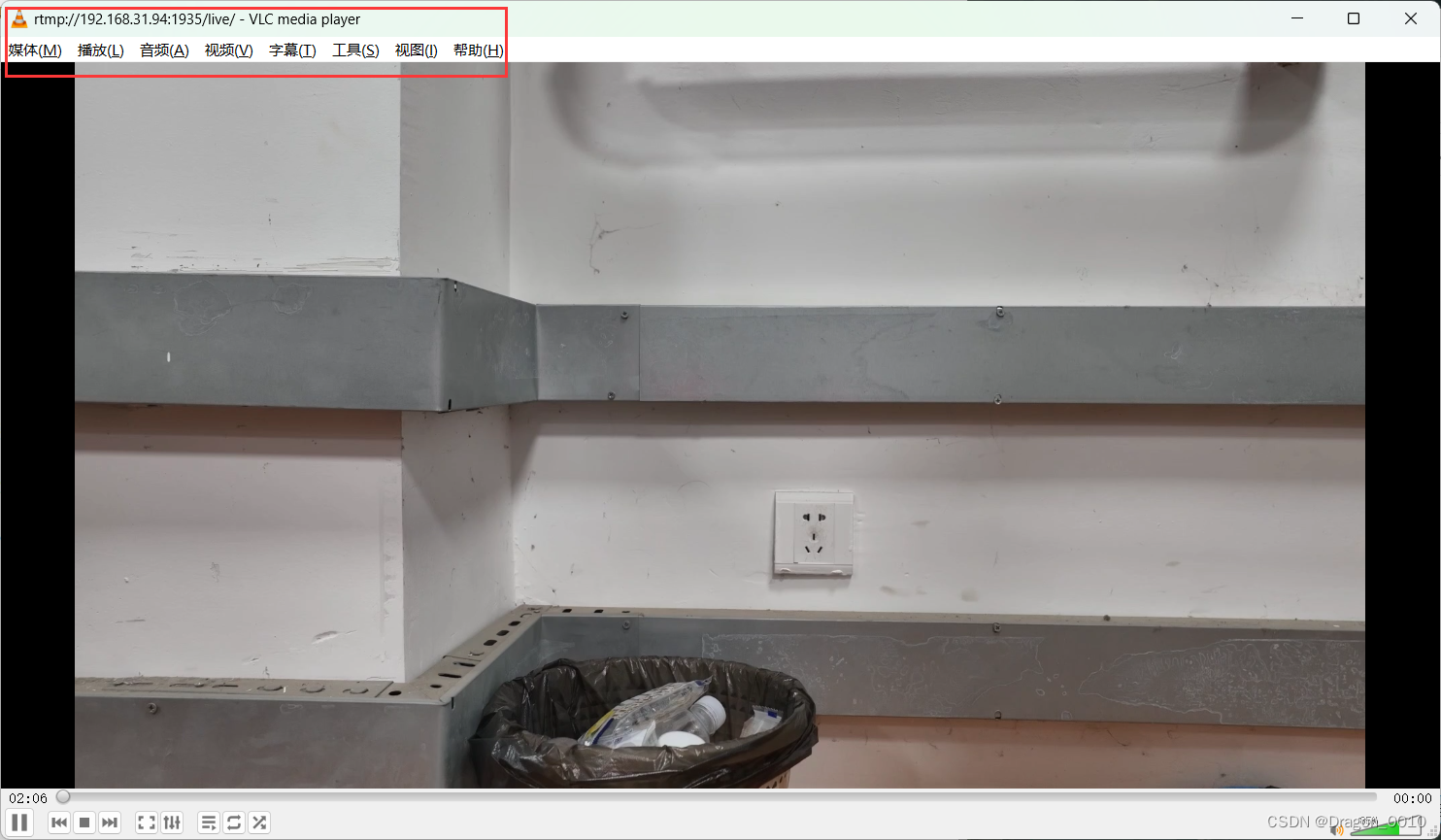
Windows环境下使用VLC获取到大疆无人机的RTMP直播推流
1.环境准备
1.安装nginx 1.7.11.3 Gryphon
下载地址:http://nginx-win.ecsds.eu/download/
下载nginx 1.7.11.3 Gryphon.zip,解压后修改文件夹名称为nginx-1.7.11.3-Gryphon; 2.安装nginx-rtmp-module
下载地址:GitHub - arut…
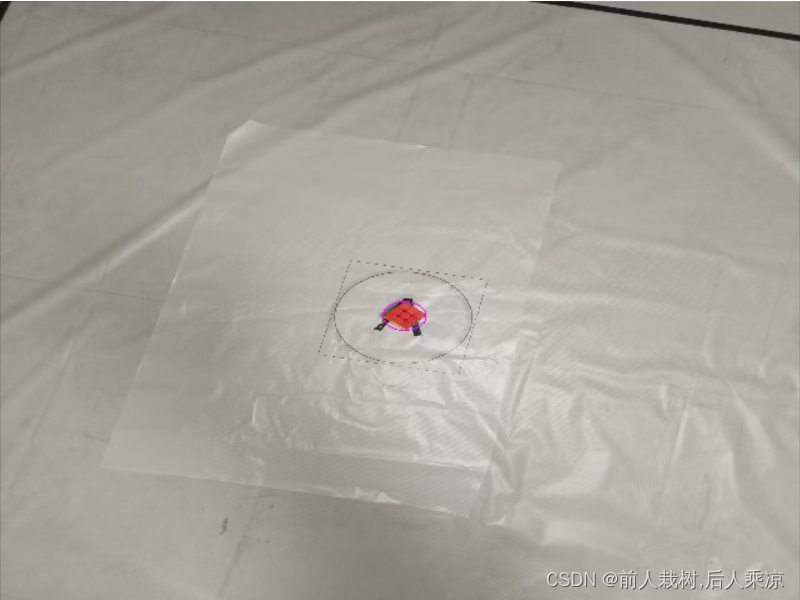
无人机竞赛常用目标检测方法--色块检测
本次开源计划主要针对大学生无人机相关竞赛的视觉算法开发。 开源代码仓库链接:https://github.com/zzhmx/Using-color-gamut-limitations-such-as-HSV-and-RGB-for-object-detection.git 主要使用传统算法,如果想要使用进阶版机器学习算法,请…
(02)Cartographer源码无死角解析-(22) 传感器数据分发→CollatedTrajectoryBuilder
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

史上最简SLAM零基础解读(8.1) - 旋转矩阵、旋转向量、欧拉角推导与相互转换
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(02)Cartographer源码无死角解析-(18) SensorBridge→landmark、Imu、GPS 数据坐标系变换
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(17) SensorBridge→里程计数据坐标系变换与TfBridge分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(14) Node::AddTrajectory()→订阅话题与注册回调函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

史上最简SLAM零基础解读(10.3) - g2o(图优化)→边(Edge)编程细节
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(01)ORB-SLAM2源码无死角解析-(61) 闭环线程→闭环矫正: CorrectLoop→全代码注释
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(60) 闭环线程→闭环矫正: CorrectLoop→地图点融合、共视关系更新
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(19) 重投影误差,卡方检验→CheckFundamental,CheckHomography
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(52) 局部建图线程→剔除关键帧KeyFrameCulling()、整体线程梳理
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

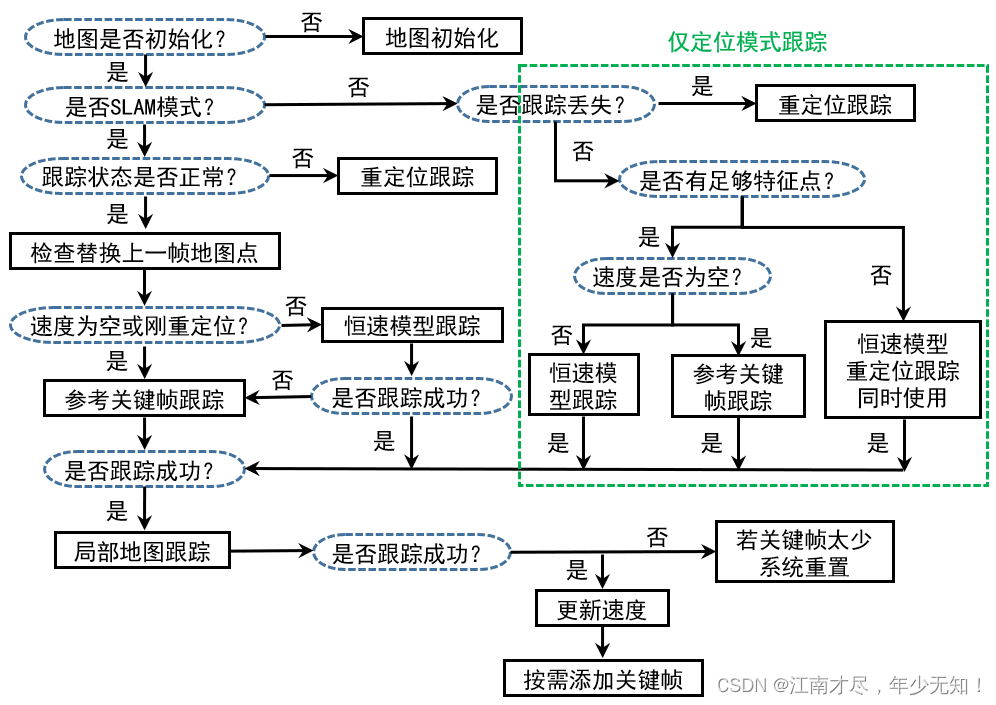
(01)ORB-SLAM2源码无死角解析-(48) 不同跟踪方法的对比、梳理完整跟踪流程→Tracking::Track()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(47) 跟踪线程→局部地图跟踪TrackLocalMap():局部地图点过滤
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(44) EPnP 源代码分析(4)→PnPsolver::qr_solve():QR分解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析-接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正…
(01)ORB-SLAM2源码无死角解析-(41) EPnP 源代码分析(1)→PnPsolver总体流程与思路
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(34) 跟踪线程→初步了解跟踪线程,参考关键帧追踪TrackReferenceKeyFrame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(27) 共视图、本质图、拓展图
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
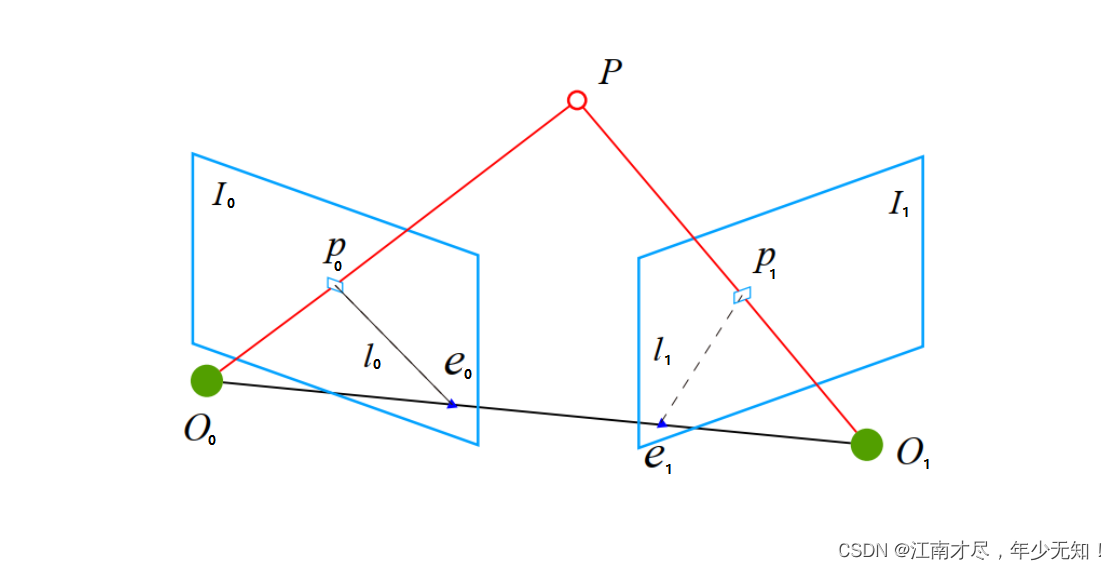
史上最简SLAM零基础解读(5) - Homography,Fundamental,Essential深入浅出→了解适用场景:共面、非共面、仅旋转
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
通过文首的一系列博客,相信大家对于 Homography,Fundamental,Essential 矩阵已经有了一一定认知,比如 单应…
(四)Tiki-taka算法(TTA)求解无人机三维路径规划研究(MATLAB)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、Tiki-taka算法(TTA…

(01)ORB-SLAM2源码无死角解析-(14) 地图初始化→单目初始化MonocularInitialization():尺度不确定性
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(13)追踪总体框架讲解→Tracking::Track()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(12)图像、特征点、关键点去畸变
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(11)ORBextractor::operator()→BRIEF描述子
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(01) 环境搭建,demo运行,ROS一键安装_清除各种疑难杂症
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析-接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_…
【论文阅读】基于鲁棒强化学习的无人机能量采集可重构智能表面
只做学习记录,侵删原文链接 article{peng2023energy, title{Energy Harvesting Reconfigurable Intelligent Surface for UAV Based on Robust Deep Reinforcement Learning}, author{Peng, Haoran and Wang, Li-Chun}, journal{IEEE Transactions on Wireless Comm…
多旋翼无人机能够在空中悬停
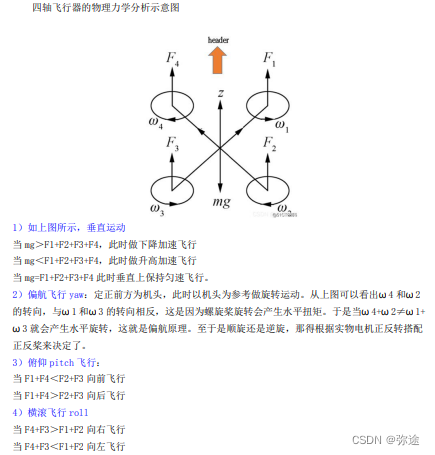
多旋翼无人机能够在空中悬停,主要归功于其独特的动力布局和飞行控制系统。其悬停控制主要通过调整螺旋桨的转速来实现。以下以四轴飞行器为例进行说明:
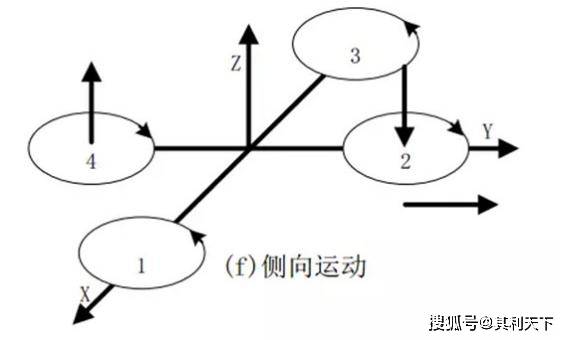
横滚运动控制:通过同时加大1号和4号电机的转速、减小2号和3号电机的转速,产…
(1)(1.11) SiK Radio v2(一)
文章目录
前言
1 概述
2 特点
3 状态LED灯 前言
SiK 遥测无线电是在自动驾驶仪和地面站之间建立遥测连接的最简单方法之一。本文提供了如何连接和配置无线电的基本用户指南。 3DR Radio v2(SiKRadio 的消费者版本)
!Note
本页面以前的…

无人机视频与GIS融合三维实景怎么实现?
无人机视频与GIS融合三维实景怎么实现?无人机三维GIS作为一项新兴的测绘重要手段,具有续航时间长、成本低、机动灵活等优点,为城市的规划建设带来极大便利。 那么此项技术有什么样的特点呢?下面智汇云舟就带大家一起来了解一下。 三维是将采集以及经运…
(二)七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…
四旋翼无人机学习第4节--STM32、MPU9250等器件的绘制
注意:本博客主要是复现小马哥四轴,即从画板、焊接、写code、最后到调试。
0 前言
当画stm32、mpu9250这种多引脚的芯片,就需要参考芯片手册啦。 这里给大家推荐一个芯片手册查询网站。 半导小芯-芯片查询工具 进入网站,输入芯片…
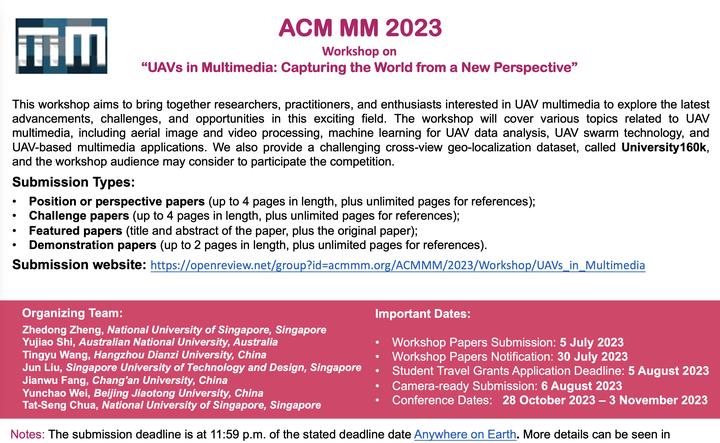
ACM MM23 Workshop|多媒体+无人机
摘要:
无人驾驶飞行器 (UAV),也称为无人机,由于能够从空中捕获高质量的多媒体数据,近年来变得越来越流行。 随着航空摄影、电影摄影和测绘等多媒体应用的兴起,无人机已成为收集丰富多样的多媒体内容的强大工具。 本次…
基于Raspberry Pi和双目摄像头的无人机目标识别、跟踪与实时测距系统开发
硬件选择:
Raspberry Pi 4: 它是一款功能强大的微型计算机,可以轻松地与各种传感器和摄像头配合使用。 双目摄像头: 例如选择Raspberry Pi相容的Arducam双目摄像头,双目摄像头可以捕捉到两个略有差异的图像,这对于空间测距非常重要。 算法: …

很全面 影响无人机自动返航的因素总结
在无人机技术不断成熟的今天,自主返航技术成为保障飞行安全的一种重要工具。无人机在多种情况下能够智能判断,主动实施返航动作,为用户提供更加可靠的飞行保障。以下是一些常见的无人机自动返航场景,让我们深入了解这项技术背后的…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化
在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现…

基于社交网络算法的无人机航迹规划-附代码
基于社交网络算法的无人机航迹规划 文章目录 基于社交网络算法的无人机航迹规划1.社交网络搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用社交网络算法来优化无人机航迹规划。 …
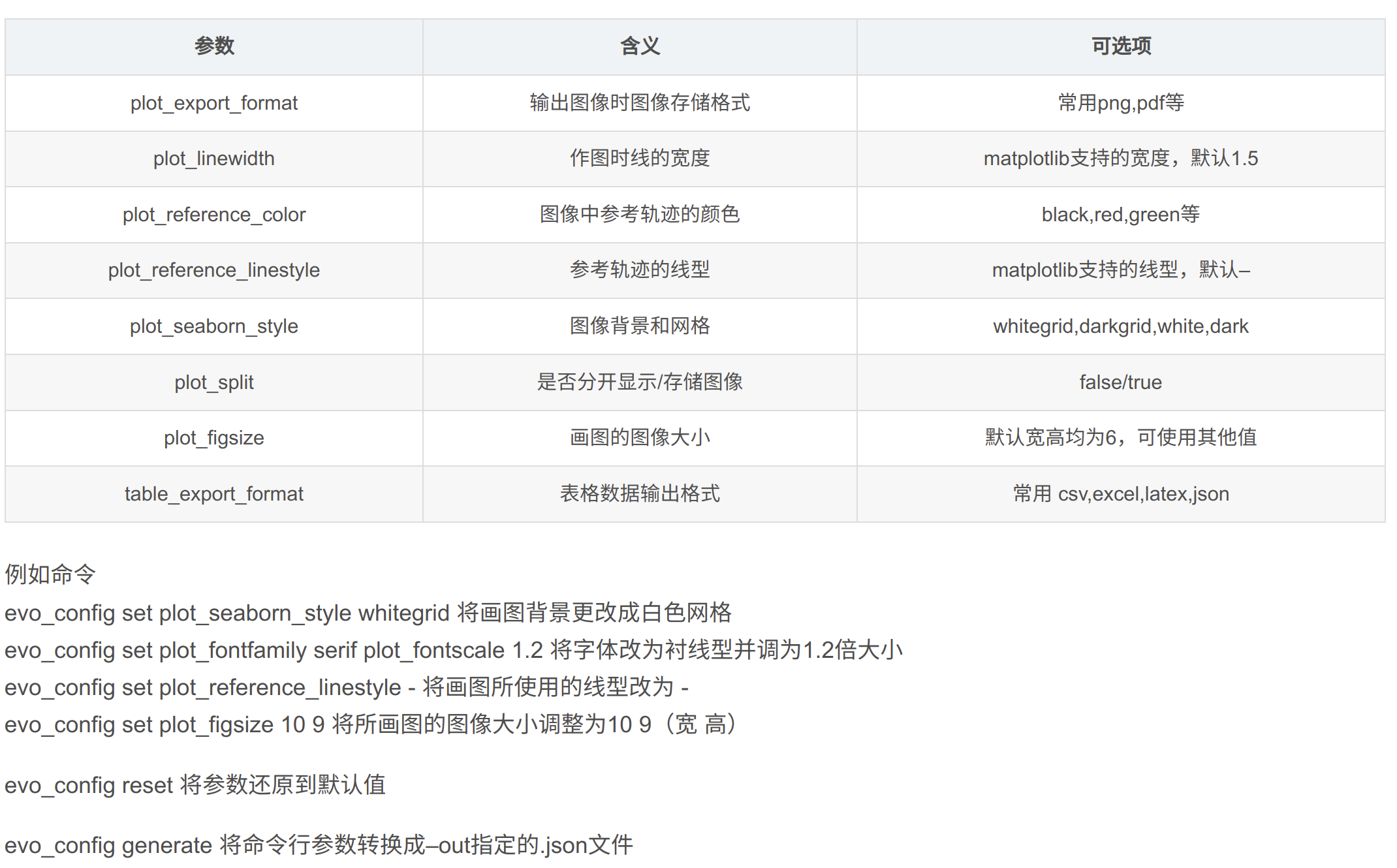
从零入门激光SLAM(十二)——evo工具箱
大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激…

无人机低空视角:针对人群密集场景的检测、跟踪和计数技术
无人机低空视角:针对人群密集场景的检测、跟踪和计数技术 DroneCrowdPaper简介数据集ECCV2020挑战DroneCrowd(完整版) DroneCrowd
Paper
无人机在人群中的检测、跟踪和计数:基准研究。
简介 本文提出了一种时空多尺度注意力网络…
(02)Cartographer源码无死角解析-(31) LocalTrajectoryBuilder2D::AddRangeData()→点云数据重力对齐,Z轴过滤
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
AI:03-基于深度神经网络的低空无人机目标检测图像识别的研究
文章目录 数据集收集与预处理深度神经网络模型设计模型训练与优化目标检测与图像识别代码实现:实验结果与分析讨论与展望低空无人机的广泛应用为许多领域带来了巨大的潜力和机会。为了实现无人机的自主导航和任务执行,准确的目标检测和图像识别是至关重要的。本文旨在研究并提…
优化模型验证24:单车单无人机旅行商、多车单无人机路径问题模型、gurobipy代码及可视化
本文介绍了两类无人机卡车协同配送问题: 第一类是旅行商问题,也即一辆卡车拉着一架无人机服务给定的节点集合第二类是车辆路径问题,这里强制要求了一架卡车只能搭配一架无人机无人机卡车旅行商问题
符号列表: N N N:表示所有节点集合,含起始和终止节点M M M

(02)Cartographer源码无死角解析-(30) LocalTrajectoryBuilder2D::AddRangeData()→激光雷达运动畸变较正
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

在docker环境下从头搭建openvslam/orb_slam3的流程记录以及问题总结
文章目录 0. 前言1. MobaXterm软件2. docker操作2.1. 拉一个ubuntu镜像2.2. 修改名字(可选)2.3. 删除之前的docker镜像(可选) 3. openvslam搭建流程3.1. 起容器3.2. 前置包的安装3.3. 安装Eigen3.4. 安装opencv3.5. 安装DBoW23.6.…
DJI 无人机Onboard SDK ROS 3.8.1 软件默认配置运行问题及解决方法
DJI 无人机Onboard SDK ROS 3.8.1 软件默认配置运行问题及解决方法连接设备启动SDKDJI Onboard SDK ROS 3.8.1是可以直接适配 M210飞机,但是对于A3飞控,由于没有双目相机,直接运行会报错,本篇博客记录遇到的问题,及解决…
【无人机】采用最基本的自由空间路损模型并且不考虑小尺度衰落(多径多普勒)固定翼无人机轨迹规划(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…

基于人工兔算法的无人机航迹规划-附代码
基于人工兔算法的无人机航迹规划 文章目录 基于人工兔算法的无人机航迹规划1.人工兔搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用人工兔算法来优化无人机航迹规划。 1.人工兔…
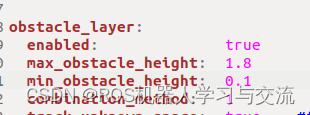
ROS在move_base警告传感器超出界限
警告传感器超出界限,通常是因为雷达的参数设置问题,应该根据雷达所在位置,修改对应的代价地图参数,如下图所示:
将其中的min_obstacle_height由0改成0.1即可。设置为0的话,则会处于代价地图的边缘…
Tello无人机py库函数解析
本文我们针对 djitellopy中的一些和函数进行详细学习
1) 与任务标识板有关的函数
任务标识板(Mission Pad) 是一种用于在机器人和无人机领域进行位置感知和导航的视觉标识工具。任务标识板通常由特定的图案、形状或编码组成,可以被机器人或…

photoscan(metashape)跑GPS辅助的无人机影像SfM(空三)教程
刚打开的photoscan界面如下图所示: 然后,点击工作区左上角的添加堆块选项: 可以看到新增了一个名为“Chunk 1”的堆块,然后,右击“Chunk 1”,依次选择add、添加照片: 即可弹出照…
(02)Cartographer源码无死角解析-(36) PoseExtrapolator→AddImuData()、AddOdometryData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

史上最简SLAM零基础解读(2) - 对极约束→Essential矩阵、Fundamental矩阵推导
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联…

行业分析| 无人机电力巡检技术的应用
随着现代生活水平的不断提升,人们对各行各业的发展都提出了更高的品质要求,对于电力的需求不断上涨,因此也加速了电力行业的转型升级。基于这一发展状况,我国电力行业逐渐开始选择应用无人机电力巡检等现代高科技技术。
无人机电…
(02)Cartographer源码无死角解析-(60) 2D后端优化→ 线程池
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
近地面无人机植被定量遥感与生理参数反演技术
遥感(RS-Remote Sensing)——不接触物体本身,用传感器收集目标物的电磁波信息,经处理、分析后,识别目标物,揭示其几何、物理性质和相互关系及其变化规律的现代科学技术。 换言之,即是“遥远的感…

(02)Cartographer源码无死角解析-(09) gflags与glog简介、及其main函数讲解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
(02)Cartographer源码无死角解析-(20) MapBuilder→MapBuilder()构造函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
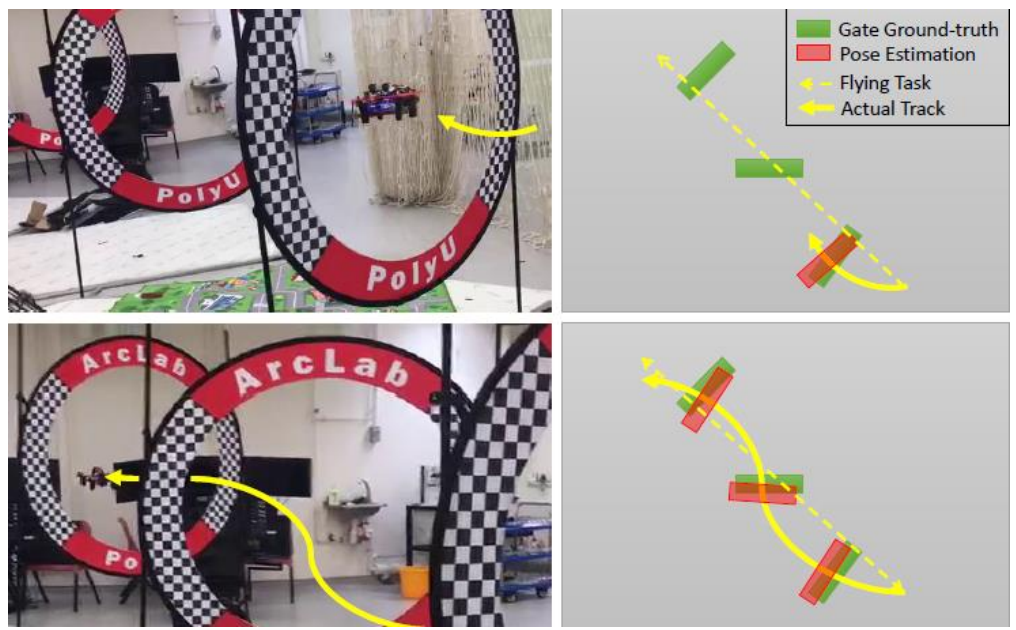
最新干货|面向无人机的自主导航与避障
分享嘉宾 | 鲁鹏文稿整理 | William1、无人机在自主导航方面的挑战无人机在未知环境上导航,面临着很多挑战,由于未知环境下,并不知道当前环境的地图可能会存在一些威胁,主要原因在于没有先验知识。这里主要有两个方面去解决或处理…
RflySim平台使用篇 | Rflysim3D软件使用系列教程(二)
导读:
RflySim3D(支持体验版)和RflySimUE5(支持完整版)为本平台核心三维显示软件, 分别基于UE4 和UE5 引擎开发,具备高逼真虚拟现实显示效果。本视频主要讲解了如何将自定义的三维场景如何加载到RflySim3D…
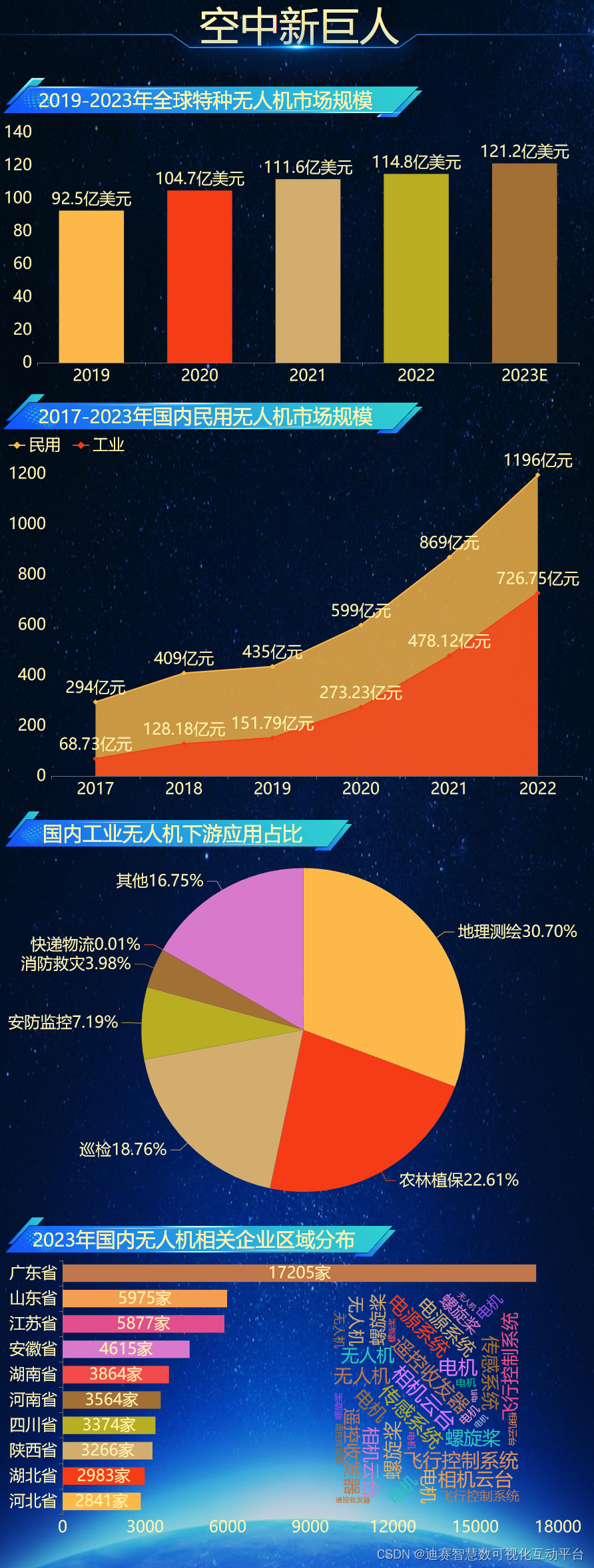
全球特种无人机市场规模逐渐扩大,预计今年将突破120亿美元
翱翔于空中是人们长久的追求,1903年,莱特兄弟发明了第一家螺旋桨飞机,这次飞行标志着飞机时代的开始。科技发展到今天,无人机(英文简称为“UAV”)作为一种高科技产品已经逐渐走进人们的生活中。 无人机技术…
RflySim平台——高可信度的无人控制系统开发、测试与评估平台
01/RflySim平台背景
智能无人系统是一个复杂系统,涉及机械、控制、计算机、通信和材料等多个领域技术,而AI无疑是开发IUS所需的关键技术之一。随着新一代人工智能兴起,我们正面临一场新的工业革命,人类创造了各种无人系统&#x…

无人机巡检输电线路是什么,怎么巡?
在今日科技迅速发展的时代,无人机为输电线路巡检提供了一种高效、安全且准确的解决方案。那么,为什么无人机巡检输电线路如此关键呢?以下是对这一问题的深入剖析。 1. 提高工作效率 传统的巡检模式与现实挑战:在过去,输…

面向未来的无人机巡检方案揭秘,巡检无人机智能高效安全巡检巡逻
无人机技术的飞速发展推动了巡检无人机在各个领域的广泛应用,其中无人机巡检方案尤为引人注目。这一方案不仅提高了日常巡检效率,还能有效降低成本,为各行业带来了实质性的经济和社会效益。无人机智能巡检就是这么安全高效靠谱。 一、无人机巡…
(一)七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…
发布一款将APM日志转换为Excel的开源工具
这几年有不少朋友向我咨询如何将APM日志转换为Excel,我之前的答复是先将日志转换为MATLAB的格式,然后用MATLAB导出为Excel。但是实际上不是每个人都会用MATLAB,并且处理数据也不是非要用MATLAB,更不是说用MATLAB了就显得专业、显得…
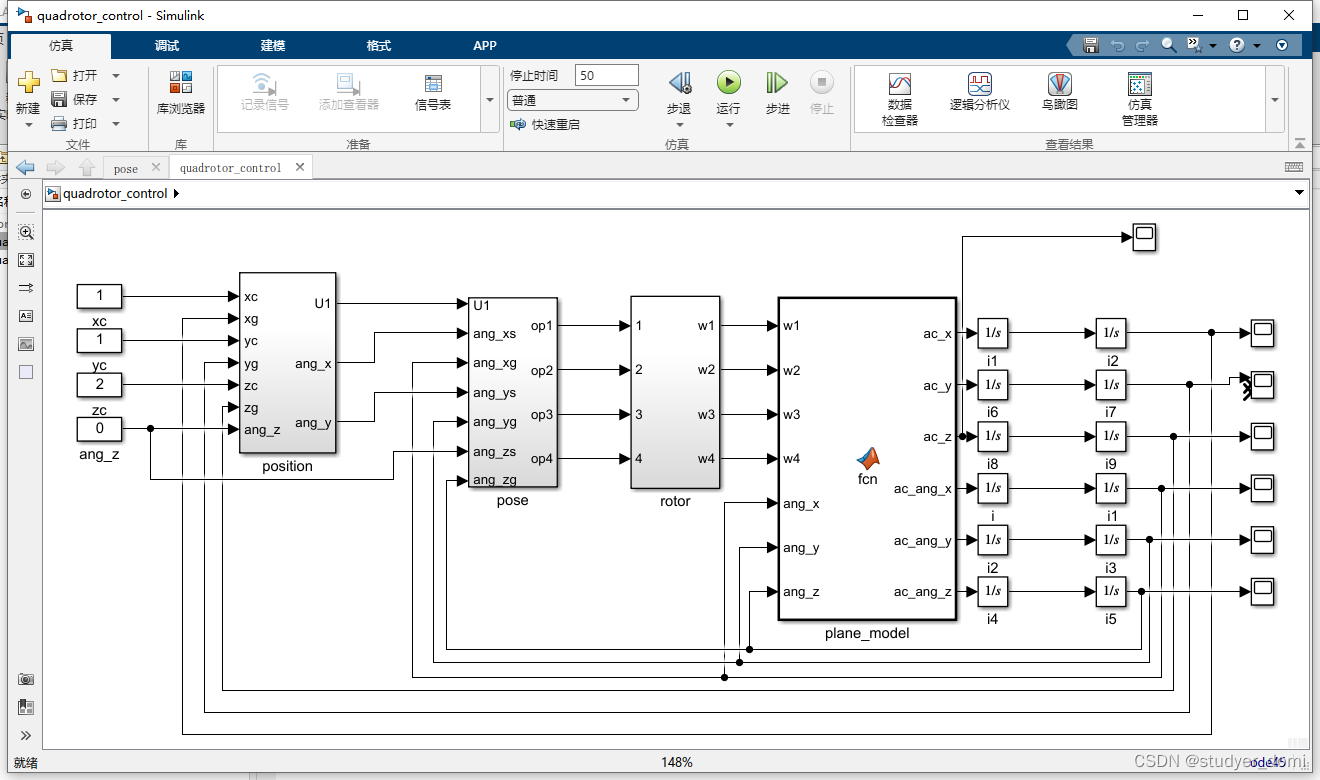
matlab simulink 四旋翼跟拍无人机仿真
1、内容简介
略 7-可以交流、咨询、答疑
2、内容说明
四旋翼跟拍无人机仿真
四旋翼、无人机 需求分析 背景介绍 无人飞行机器人,是无人驾驶且具有一定智能的空中飞行器。这是一种融合了计算机技术、人工智能技术、传感器技术、自动控制技术、新型材料技术、导航…

成都远石无人机航测服务内容
成都远石无人机航测服务致力于为客户提供DEM、DSM、DOM、三维实景模型和机载激光雷达等数据成果,获得的数据成果在各个行业得到了应用和认可。相信大家对于DEM、DSM和DOM这些名词并不陌生,但对其内涵和差别却又比较模糊,接下来就讲一下这些数…
(6)(6.6) 恢复任务回放
文章目录
前言
6.6.1 配置
6.6.2 工作原理
6.6.3 局限性 前言
本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。
!Note
从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。 在某些应用或运行区域,为了消除冲突…

森林无人机高效解决巡查难题,林区防火掀新篇
山东省某市为了强化森林火灾防范,采用了一项新兴手段——复亚智能无人机森林火情监测系统。这套系统在AI飞行大脑的指挥下,让无人机在空中巡逻,实现了无人机森林防火系统的实施落地。 一、AI大脑如何引领森林无人机高空巡逻?
在山…
DWA算法,仿真转为C用于无人机避障
DWA算法,仿真转为C用于无人机避障
链接: 机器人局部避障的动态窗口法(dynamic window approach)
链接: 机器人局部避障的动态窗口法DWA (dynamic window approach)仿真源码详细注释版
链接: 常见路径规划算法代码-Matlab (纯代码篇)
…

APM飞控使用动捕等外部定位
本文初次写于2023.03.03,pixhawk飞控应该是刷写了ArduPilot 4.1以上的版本。
机载计算机通过WIFI和vrpn_ros_client获取动捕系统(vicon或者nokov)的无人机定位数据(x,y,z四元数),然…
无人机牧羊,AI 养猪,未来农业就是高科技产业
无人机在生活中已经很常见,除了在节庆活动带来绚丽「电子烟花」和壮观的航拍大片,无人机还在改变和更多人息息相关的农业和畜牧业。 据《卫报》报道,在新西兰、英国等欧洲国家,越来越多农民正在使用无人机来牧羊。新西兰农民 Core…
【ROS+gazebo】无人机开发一:安装ros+gazebo+创建并初始化ros工作空间
Hello,大家好!最近由于课题需要开始摸索rosgazebo内容,主要做多无人机的协同仿真,准备写成一个系列,想要学习的朋友可以订阅我的频道。
我的电脑配置:ubuntu20.04 目标安装:ROS noetic版本gaze…
无人机工程安全巡检:主要应用与实施策略
无人机工程安全巡检是指使用无人机技术,对工程项目进行系统的、周期性的监测和检查,以确保工程的安全性、稳定性及其与设计的符合性。这包括但不限于建筑物、桥梁、道路、隧道、大坝等各种大型工程项目。无人机工程安全巡检不仅大大提高了效率࿰…
(6)(6.3) 自动任务中的相机控制
文章目录
前言
6.3.1 概述
6.3.2 自动任务类型
6.3.3 创建合成图像 前言
本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal ha…
(02)Cartographer源码无死角解析-(00)目录_最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(02)Cartographer源码无死角解析链接如下(有兴趣的朋友可关注计算机视觉life 进行学习): (02)Cartographer源码无死角解析-(00)目录_最新无死角讲解:https://mp.csdn.net/mp_blo…
(01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
自启动遇到某个节点或者某种环境变量问题导致启动失败
前言:此次记录无人车自启动过程遇到的问题。为了让ROS无人车能够实现飞控进行室外自主航线的问题,将飞控发布的PWM转为ROS无人车对应的速度。为了确保无人车启动后能够使用遥控器控制无人车,所以需要开机自启动。
硬件:
1、star…

基于哈里斯鹰算法的无人机航迹规划-附代码
基于哈里斯鹰算法的无人机航迹规划 文章目录 基于哈里斯鹰算法的无人机航迹规划1.哈里斯鹰搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用哈里斯鹰算法来优化无人机航迹规划。 …

基于松鼠算法的无人机航迹规划-附代码
基于松鼠算法的无人机航迹规划 文章目录 基于松鼠算法的无人机航迹规划1.松鼠搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用松鼠算法来优化无人机航迹规划。 1.松鼠搜索算法
…
Crazyswarm无人机集群套件,为开发者提供一个实验、学习和开发的验证平台
无人机集群技术有着广泛的潜力应用,如搜索和救援、环境监测、农业、建筑、物流等。通过多个无人机的协同工作,可以提高效率、扩展覆盖范围以及执行一些单个无人机难以完成的任务。为实现室内环境无人机集群算法的验证以及更复杂的任务和应用,…
(02)Cartographer源码无死角解析-(36) PoseExtrapolator→AddImuData()、TrimOdometryData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
用 .NET 启动你的 DJI Ryze Tello 无人机
大疆的 DJI Ryze Tello 是入门级的无人机,不仅在 STEM 教育中有非常广泛的应用,也可以作为编程入门的首选。通过 UDP 协议调用 DJI Ryze Tello SDK 可以让 DJI Ryze Tello 无人机执行起飞,降落,转向以及不同的花式动作。本文将会通…
(02)Cartographer源码无死角解析-(46) 2D栅格地图→RayToPixelMask()与贝汉明(Bresenham)算法
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
(02)Cartographer源码无死角解析-(42) 2D栅格地图→Submap、Submap2D、MapLimits
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
Python全自动性能无人机
Python全自动性能无人机研发开发的重要性可以从以下几个方面进行阐述: 编程语言的灵活性:Python是一种高级编程语言,具有简单易学的特点,能够快速地实现想法并进行快速原型设计。这种灵活性使得Python成为开发无人机控制系统的理想…
近地面无人机植被定量遥感与生理参数反演
目录
专题一 近十年近地面无人机植被遥感文献分析、传感器选择、观测方式及质量控制要点
专题二 辐射度量与地物反射特性
专题三 无人机遥感影像辐射与几何处理
专题四 光在植被叶片与冠层中的辐射传输机理及平面模型应用
专题五 植被覆盖度与叶面积指数遥感估算
更多应用…

如何实现无人机识别功能
无人机识别算法可以基于不同的传感器和技术,结合多种方法进行实现。以下是一些常见的无人机识别算法和技术: 视觉识别: 图像处理: 使用计算机视觉技术对无人机图像进行处理,包括特征提取、目标检测和跟踪等。深度学习&…
【无人机】基于灰狼优化算法的无人机路径规划问题研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
科技赋能 高效监管 无人机水利行业应用引领浙江水域环保
浙江省积极借助信息化手段,依托复亚智能无人机水利行业应用系统进行机场网格化布局,涵盖了区域内36条省、市级河流,全面助力无人机水利行业应用环保监测管理,成为生态保护的典范。 复亚智能无人机水利行业应用系统自动执行事先设定…

竞赛无人机搭积木式编程(三)---用户自定义航点自动飞行功能(全局定位,指哪打哪)
竞赛无人机搭积木式编程(三)---用户自定义航点自动飞行功能(全局定位,指哪打哪)
无名小哥 2023年6月10日 用户通过对前面两讲中全国大学生电子设计竞赛真题植保无人机(2021)、送货无人机&#…
强化学习应用(一):基于Q-learning的无人机物流路径规划研究(提供Python代码)
一、Q-learning简介
Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的问题。它通过学习一个价值函数来指导智能体在环境中做出决策,以最大化累积奖励。
Q-learning算法的核心思想是通过不断更新一个称为Q值的…

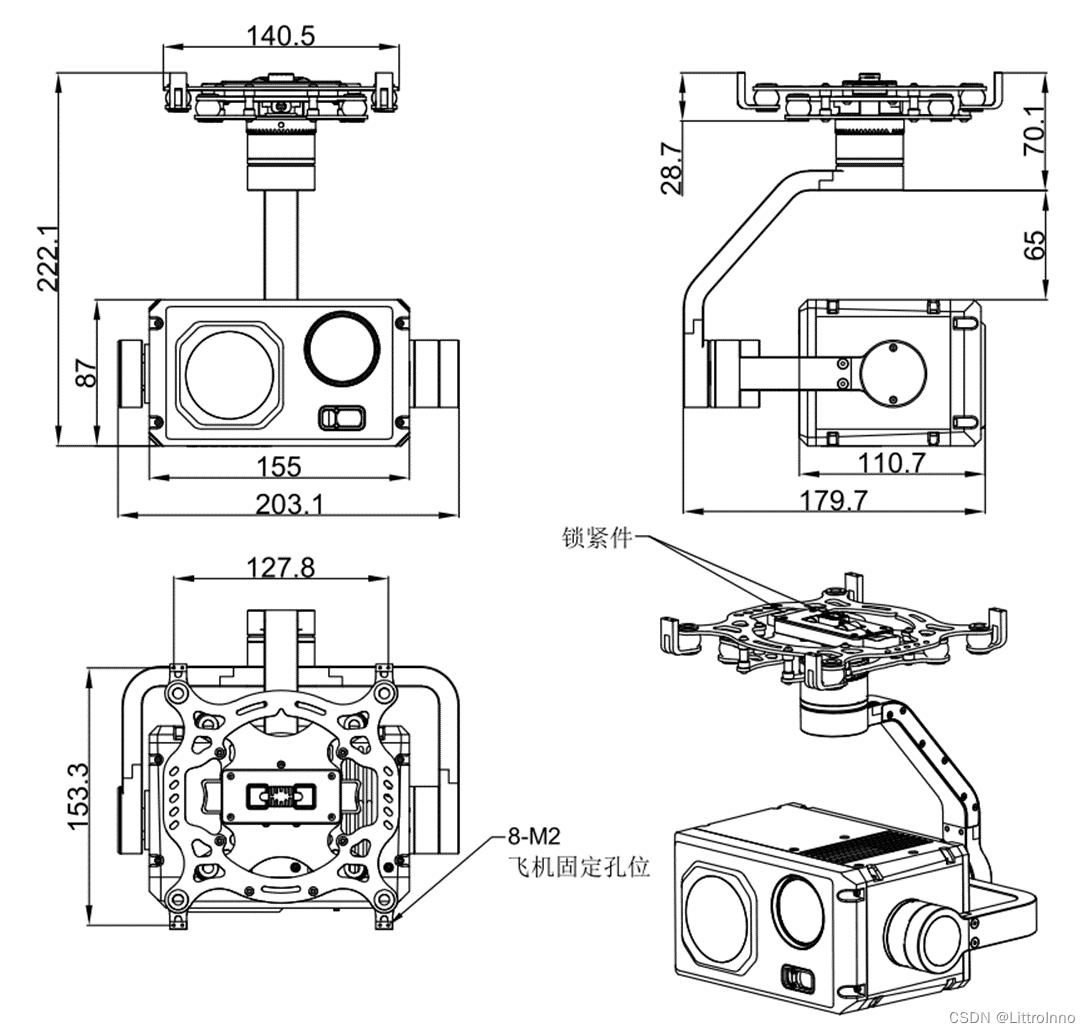
常见无人机吊舱形态-摄像头吊舱
无人机吊舱有几种常见的形式,这些形式根据无人机的用途和设计有所不同。常见的几种无人机吊舱包括: 摄像头吊舱:这是最常见的一种,用于航拍、监视和侦察。这些吊舱通常装备有高分辨率的摄像头,有时还包括热成像和夜视功…
面向植保任务的无人机集群系统及其应用研究
摘 要
随着无线通信技术的发展,无人机在民用和军事上的应用越来越广泛。由于单无人机负重少、体积小、覆盖面积小,不能满足复杂任务需求,近年来,关于无人机集群协同编队控制方面的研究发展迅速。植保无人机在实际作业过程中&…
(15)第一人称视角视频
文章目录 前言
15.1 推荐的零件
15.2 连接图示
15.3 通过任务计划器最小化OSD设置
15.4 集成式OSD
15.5 用户视频/博客
15.6 与FPV飞行特别相关的安全警告
15.7 政府/地方法规 前言
第一人称视角在飞行时为你提供了真正的飞行员视角,它将视频摄像机和发射器…
千巡翼X4轻型无人机 赋能智慧矿山
千巡翼X4轻型无人机 赋能智慧矿山
传统的矿山测绘需要大量测绘员通过采用手持RTK、全站仪对被测区域进行外业工作,再通过方格网法、三角网法、断面法等进行计算,需要耗费大量人力和时间。随着无人机航测技术的不断发展,利用无人机作业可以大…
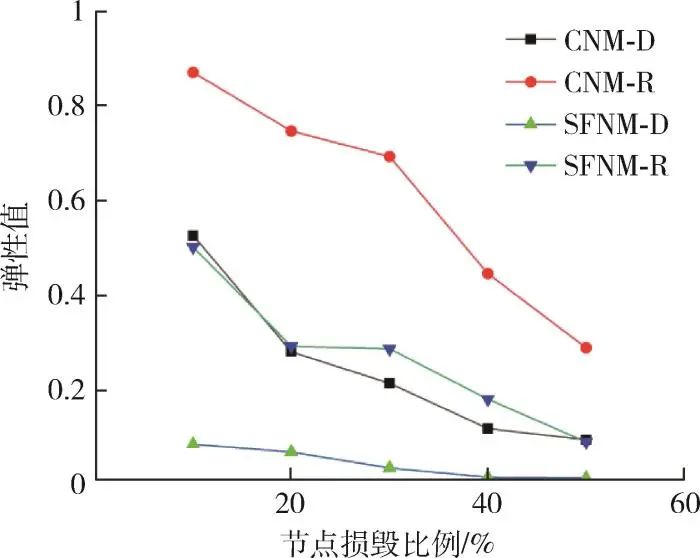
无人机集群社团网络弹性重构研究
源自:现代防御技术
作者:袁国栋 何明 韩伟 禹明刚 成铭洋
“人工智能技术与咨询” 发布
摘 要
无人机集群作战是未来战争的新型作战样式。无人机集群网络弹性重构能力,是评价无人机集群体系作战效能的关键指标。剖析了无人机集群网…
超维空间S2无人机使用说明书——53、进阶版——添加滤波后使用PID算法进行基于yolo的目标跟踪
引言:为了提高识别效果,采用递推均值滤波的算法对图像返回的识别准确度和位置信息进行处理,在实际应用过程中有着不错的表现。本小节内容是在52小节的基础上进行优化,可以先参考52小节,在此基础上再参考此处代码即可。…

揭秘千巡翼X4卫星通讯无人机
揭秘千巡翼X4卫星通讯无人机
在无人机作业的时候,经常遇到这些异常场景,例如通信网络中断,强干扰,导致无人机无法与飞手通信等。而这些给无人机作业带来三大难题:
难题1,山区作业时通信中断,飞…
(1)(1.13) SiK无线电高级配置(六)
文章目录
前言
15 使用FTDI转USB调试线配置SiK无线电设备
16 强制启动加载程序模式
17 名词解释 前言 本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 15 使用FTDI转USB调试线配置SiK无线…
史上最全slam从零开始-总目录
讲解关于slam一系列文章主要分为以下几个板块,其中的序列号代表其学习难度,入门学员建议从01开始学习,相同序列号表示其难度相当 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式…

(02)Cartographer源码无死角解析-(47) 2D栅格地图→总体流程梳理与总结,及核心关键CastRays()讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(37) PoseExtrapolator→AddPose()、旋转向量(求导)变换成角速度
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
(02)Cartographer源码无死角解析-(26) OrderedMultiQueue::Dispatch()→数据排序分发
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(25) 阻塞队列BlockingQueue,与OrderedMultiQueue成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(21) MapBuilder→AddTrajectoryBuilder()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(12) Node类初探→构造函数与开始轨迹
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…

(02)Cartographer源码无死角解析-(05) 程序运行常见错误与解决→模拟错误
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正…

(02)Cartographer源码无死角解析-(02) ROS基础讲解→记录编译过程及常用指令
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …

史上最简SLAM零基础解读(10.2) - g2o(图优化)→顶点 (Vertex)编程细节
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(01)ORB-SLAM2源码无死角解析-(59) 闭环线程→闭环矫正: CorrectLoop→位姿传播,地图点矫正
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(10.4) - g2o(图优化)→示例代码讲解(slam十四讲第二版为例)
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(01)ORB-SLAM2源码无死角解析-(58) 闭环线程→计算Sim3: 源码Sim3Solver::iterate()讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(6) - 卡方分布(chi-square distribution)和()卡方检验(Chi-Squared Test) → 理论讲解与推导
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…

(01)ORB-SLAM2源码无死角解析-(50) 局部建图线程→流程以及处理新关键帧:ProcessNewKeyFrame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(43) EPnP 源代码分析(3)→find_betas_approx(),gauss_newton()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(32) ORB特征匹配→跟踪线程BoW加速匹配,关键帧特征点跟踪SearchByBoW()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(33) ORB特征匹配→局部建图BoW加速匹配,三角化SearchForTriangulation
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(28) 双目Stereo相机立体匹配,SAD算法→深度求解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(21) 基本矩阵Fundamental→本质矩阵Essential 分解恢复 Rt
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(20) 分解Homography,恢复Rt→Faugeras SVD-based decomposition
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最简SLAM零基础解读(3) - 白话来说SVD奇异值分解(1)→原理推导与奇异值求解举例
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
这篇博客,主要使用最通俗的语言来讲解SVD奇异值分解,通过该篇博客,将知道 SVD 的来龙去脉&…
(01)ORB-SLAM2源码无死角解析-(17) 单目初始化Initializer→八点发求解Fundamental矩阵
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(16) 单目初始化Initializer→八点发求解Homography矩阵
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(15) 单目初始化MonocularInitialization()→Initializer
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(10)ORBextractor::operator()→灰度质心法
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(09)ORBextractor::operator()→FAST关键点均匀化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(08)ORBextractor::operator()→FAST关键点提取
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(07)ORBextractor::operator()→构建图像金字塔
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
10.7 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 中航无人机2024届校园招聘正式启动!
校招 | 中航无人机2024届校园招聘正式启动! 2、校招 | 中兵无人机研究院有限公司2024校园招聘
校招 | 中兵无人机研究…
无人机队形控制的算法
无人机队形控制的算法通常有以下几种: 1.长机-僚机法(Leader-Follower):该算法通过设定一架无人机作为长机,其他无人机作为僚机,通过长机的信息来控制僚机的运动,以达到队形控制的目…

基于动物迁徙算法的无人机航迹规划-附代码
基于动物迁徙算法的无人机航迹规划 文章目录 基于动物迁徙算法的无人机航迹规划1.动物迁徙搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用动物迁徙算法来优化无人机航迹规划。 …

基于ESP32设计可以通过 WiFi 控制的基于 ESP32 的定制四轴飞行器
介绍 我想选择一个涉及物联网概念的项目,例如无线通信和服务器端脚本编写。我最终决定建造一架四轴飞行器,使用定制的机载飞行控制器进行飞行,该控制器通过 WiFi 从触摸屏平板电脑接收操纵命令。该项目的最终目标是让四轴飞行器从相机图像中跟踪移动物体并跟随它。
硬件
对…
MultiWii平台Arduino无人机
该无人机飞行非常好,代码基于MultiWii平台,所有组件都在无人机PCB上,所有内容在本教程中进行了说明。 因此,如果要进行相同操作,请遵循本教程。 无线电控制器也基于arduino,我们在上一教程中已经做到了。 该…

睿铂相机同步性控制技术解析
极客睿铂
前几期睿铂给大家分享了一些倾斜相机背后的技术,主要都是的关于镜头光学方面的。但实际上倾斜摄影相机还有很多其他关键性技术有待突破,任何技术的发展都不能一蹴而就,需要根据客户的问题反馈,发现新的问题并解决问题&a…

开源无人机发展简史,让你了解“开源”的由来
导语:你了解开源无人机吗?这次公开课能让你对开源无人机有个简单的了解。无人机产业的发展之快速我们已经报道了数不清的篇幅,在科技媒体对无人机的报道中,多数都会围绕成型的产品来进行,报道的企业也都是一些类似DJI这…
P450进阶款无人机室内定位功能研测
在以往的Prometheus 450(P450)无人机上,我们搭载的是Intel Realsense T265定位模块,使用USB连接方式挂载到机载计算机allspark上,通过机载上SDK驱动T265运行并输出SLAM信息,以此来实现室内定位功能。
为进…
什么是无人机全自动飞行系统?概念、构成、作用深度解析
无人机的工业化应用深入催生出新的痛点,无人机应用飞手培养难、成本高、技术参差不齐,以及应急响应和采集作业价值等没有得到充分释放,由此无人机自动飞行系统、无人机自动机场横空出世,因其无人化、自动化、无人机值守的应用特性…

消防态势标绘工具,为消防基层工作助力
背景介绍
无人机测绘技术在消防领域的应用越来越普及,高清的二维正射影像和倾斜摄影实景三维模型能为消防态势标绘提供高质量的素材,消防队急需一个简便易用的、能够基于这些二三维的高清地图成果进行态势标绘的工具软件,使得消防“六熟悉”…
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---航向控制前言航向控制P控制收敛结果收敛过程PD控制收敛结果收敛过程结果总结前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无线遥控或自主飞行、…
基于matlab城市空中交通场景中的激光雷达与雷达融合仿真(附源码)
目录
一、创建城市空中交通方案
二、定义无人机传感器套件
三、定义跟踪系统
3.1 激光雷达点云处理
3.2 激光雷达跟踪器
3.3 雷达跟踪器
3.4 轨道融合
四、可视化
五、模拟场景
六、跟踪指标
七、总结
八、程序 此示例演示如何使用多对象跟踪器跟踪城市环境中的各…
优化模型验证23:带无人机停靠站的卡车无人机协同配送车辆路径问题、模型、gurobipy验证及结果可视化
带中转hub的卡车无人机车辆路径问题
模型来源为:Wang Z , Sheu J B . Vehicle routing problem with drones[J]. Transportation Research Part B: Methodological, 2019, 122(APR.):350-364.
问题描述:
这篇问题研究了一个带停靠站的卡车无人机路径问题,无人机仅能从起点…

(1)(1.12) LeddarTech LeddarVu8
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
LeddarTech LeddarVu8 是一款长距离(185m)激光雷达,可在 16 度至 99 度视场范围内提供 8 个单独的距离,具体取决于所使用的型号。ArduPilot 始终使用所提供的 8 个距离中最…

【AI视野·今日Robot 机器人论文速览 第五十三期】Thu, 12 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Thu, 12 Oct 2023 Totally 25 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Pixel State Value Network for Combined Prediction and Planning in Interactive Environments Authors Sascha Rosbach, St…
(1)(1.1) Bluetooth
文章目录
前言
1 连接到自动驾驶仪
2 连接Mission Planner快速入门
3 与Mission Planner的详细连接
4 从安卓地面站连接
5 如何更改波特率、设备名称和设备密码
6 故障排除
7 产品规格 前言
蓝牙数据链路(如 HC-06 模块)(HC-06 module)可用于将…

绿色能源守护者:光伏运维无人机
随着我国太阳能光伏产业被纳入战略性新兴产业,光伏发电成为实现“双碳”目标的关键之一。在政策支持下,光伏产业维持高速发展,为迎接“碳达峰、碳中和”大势注入了强大动力。在这一背景下,复亚智能与安徽一家光伏企业合作…
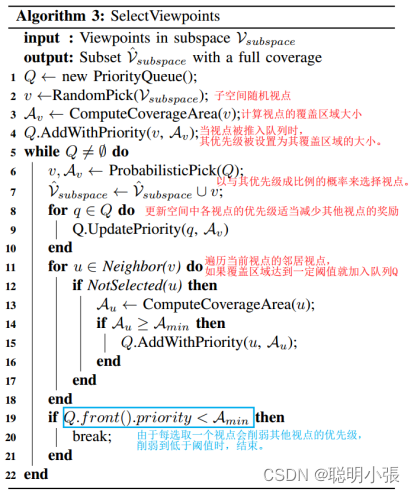
【Hierarchical Coverage Path Planning in Complex 3D Environments】
Hierarchical Coverage Path Planning in Complex 3D Environments 复杂三维环境下的分层覆盖路径规划 视点采样全局TSP 算法分两层,一层高级一层低级: 高层算法将环境分离多个子空间,如果给定体积中有大量的结构,则空间会进一步细…
云台/稳定器/无人机姿态控制之欧拉角与四元数控制优缺点分析
基于欧拉角的姿态控制简述: 通过陀螺仪数据解算出姿态:pitch,roll,yaw(相对航向),根据目标 姿态:dst_pitch,dst_roll,dst_yaw计算出误差姿态pitch_err,roll_err,yaw_err。将误差姿态转换为目标速度e_pitch_rate,e_roll_rate,e_yaw_rate。然后…


精准定位安全续航 无人机解决方案打造交通巡逻新模式
现代城市交通管理是城市现代化的重要组成部分,但传统的交通管理系统存在一系列复杂繁琐的问题,同时,交警执勤也存在较大的安全隐患。为应对这一挑战,复亚智能深入研究无人机技术及应用,推出了一套全面的无人机解决方案…
【AI视野·今日Robot 机器人论文速览 第五十八期】Thu, 19 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Thu, 19 Oct 2023 Totally 25 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
InViG: Benchmarking Interactive Visual Grounding with 500K Human-Robot Interactions Authors Hanbo Zhang, Jie Xu, Yuch…
(8)(8.8) CAN总线设置
文章目录 前言
1 概述
2 配置设置
3 CAN ESCs 前言
本文展示了如何设置 CAN 总线,以及用户有哪些选项来完成适合其特定需求的设置。
!
多旋翼飞控底层算法开发系列实验 | 多旋翼动力系统设计实验2
多旋翼飞控底层算法开发系列实验 | 多旋翼动力系统设计实验2 01/多旋翼动力系统简介
多旋翼无人机的动力系统通常包括螺旋桨、电机、电调以及电池。动力系统是多旋翼最重要的组成部分,它决定了多旋翼的主要性能,如悬停时间、载重能力、飞行速度和飞行距…
(9)基于发射器的调优
文章目录 前言
1 概述
2 调优值
3 用任务规划器设置 前言
你可以在飞行中使用你的遥控发射器进行广泛的参数调优。这是为那些无法使用自动调优功能的高级用户准备的,或者希望通过对每个参数的完全手动调优控制来进行微调。 1 概述
基于发射机的调优允许你在飞行…

(01)ORB-SLAM2源码无死角解析-(06) 图像金字塔_ORB特征点
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(04)单目追踪_总体框架讲解TrackMonocular→GrabImageMonocular
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(03)ORB_SLAM2::System之初构造函数解读
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
超维空间S2无人机使用说明书——52、初级版——使用PID算法进行基于yolo的目标跟踪
引言:在实际工程项目中,为了提高系统的响应速度和稳定性,往往需要采用一定的控制算法进行目标跟踪。这里抛砖引玉,仅采用简单的PID算法进行目标的跟随控制,目标的识别依然采用yolo。对系统要求更高的,可以对…

2014年亚太杯APMCM数学建模大赛A题无人机创造安全环境求解全过程文档及程序
2014年亚太杯APMCM数学建模大赛
A题 无人机创造安全环境
原题再现 20 国集团,又称 G20,是一个国际经济合作论坛。2016 年第 11 届 20 国集团峰会将在中国召开,这是继 APEC 后中国将举办的另一个大型峰会。此类大型峰会,举办城市…
【无人机】无人机平台的非移动 GPS 干扰器进行位置估计的多种传感器融合算法的性能分析(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
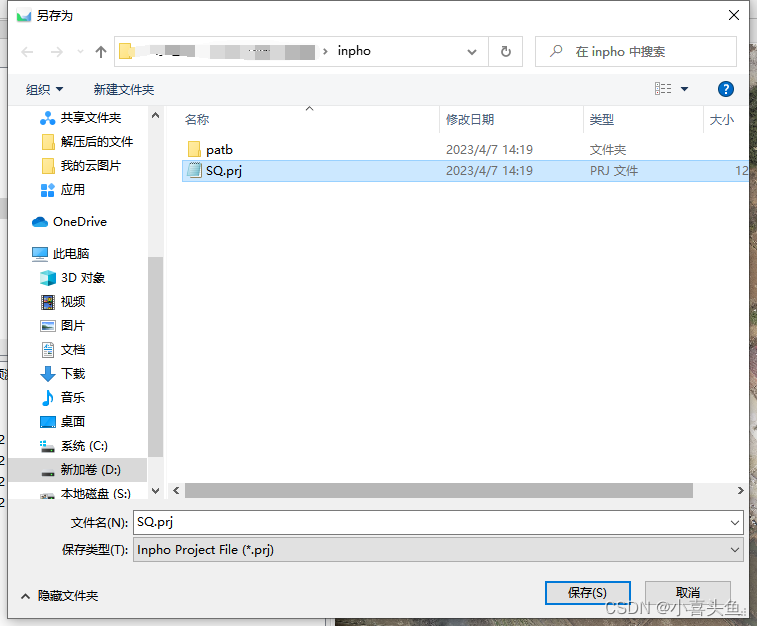
Agisoft Metashape 空三导入inpho(带连接点和控制点)
Agisoft Metashape 空三导入inpho(带连接点和控制点) 文章目录 Agisoft Metashape 空三导入inpho(带连接点和控制点)前言一、导出工程二、导入工程三、导入连接点四、导入控制点和创建航带五、查看连接点前言
本文讲解通过Agisoft Metashape空三出来的连接点导入inpho。Ag…
【无人机】PIXHAWK、PX4、APM区别
PIXHAWK、PX4、APM APM固件专为Arduupilot开发的固件,现也用于PIXHAWK。有ArduCopter社区支撑、开放,功能全、迭代升级快,适合直接用。由于有较多的历史兼容性需求,软件代码体系相对杂乱,还封装了PX4的内核,…
浙江启用无人机巡山护林模式,火灾扑救效率高
为了保护天然的森林资源,浙江当地林业部门引入了一种创新技术:林业无人机。这些天空中的守护者正在重新定义森林防火和护林工作的方式。 当下正值天气干燥的季节,这些无人机开始了它们的首次大规模任务。它们在指定的林区内自主巡逻ÿ…

城市安全守护者:分析无人机在交通领域的应用
随着科技的进步,无人机在交通领域的应用不断增加,为智慧交通管理提供了新便利。无人机凭借其灵活性,在违章取证、交通事故侦查、交通疏导等方面展现出巨大的应用潜力。无人机在交通领域的应用有哪些?跟着我们一探究竟。 1、违章取…

无人机石油管道巡检方案新亮点:灵活准确又高效
在当前石油工业的安全管理中,无人机技术逐渐成为一种不可或缺的工具。随着我国油气管道里程的持续增长,确保这些关键基础设施的安全运行变得越来越重要。传统的巡检方法已经无法满足现代油气行业的需求,而无人机石油管道巡检技术的应用提供了…

报名倒计时!| 基于RflySim平台飞控底层算法开发专题培训(第二期)
RflySim 暑期学校
飞思实验室“基于RflySim平台飞控底层算法开发”系列专题培训第二期开启报名了!专题培训由戴训华副教授以及飞思实验室学生&工程师团队主讲,采用“线上线下”集中授课形式,培训时间为8月28日-9月3日;课程内…

基于头脑风暴算法的无人机航迹规划-附代码
基于头脑风暴算法的无人机航迹规划 文章目录 基于头脑风暴算法的无人机航迹规划1.头脑风暴搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用头脑风暴算法来优化无人机航迹规划。 …
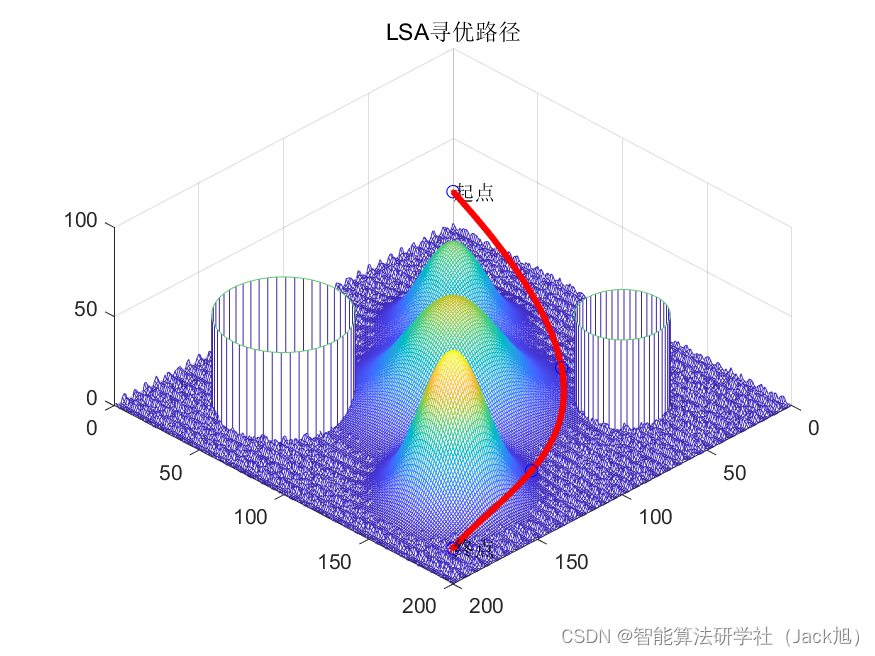
基于闪电搜索算法的无人机航迹规划-附代码
基于闪电搜索算法的无人机航迹规划 文章目录 基于闪电搜索算法的无人机航迹规划1.闪电搜索搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用闪电搜索算法来优化无人机航迹规划。 …

基于法医调查算法的无人机航迹规划-附代码
基于法医调查算法的无人机航迹规划 文章目录 基于法医调查算法的无人机航迹规划1.法医调查搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用法医调查算法来优化无人机航迹规划。 …
无人机航迹规划:小龙虾优化算法COA求解无人机路径规划MATLAB(可以修改起始点,地图可自动生成)
一、小龙虾优化算法COA
小龙虾优化算法(Crayfsh optimization algorithm,COA)由Jia Heming 等人于2023年提出,该算法模拟小龙虾的避暑、竞争和觅食行为,具有搜索速度快,搜索能力强,能够有效平衡…

基于浣熊算法的无人机航迹规划-附代码
基于浣熊算法的无人机航迹规划 文章目录 基于浣熊算法的无人机航迹规划1.浣熊搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用浣熊算法来优化无人机航迹规划。 1.浣熊搜索算法
…
![助力森林火情烟雾检测预警,基于YOLOv5全系列模型[n/s/m/l/x]开发构建无人机航拍场景下的森林火情检测识别系统](https://img-blog.csdnimg.cn/8294e1006ef04d148dba191db6b34def.png)
助力森林火情烟雾检测预警,基于YOLOv5全系列模型[n/s/m/l/x]开发构建无人机航拍场景下的森林火情检测识别系统
森林防火一直是非常重要的事情,火情的早发现早预警就能及早扑灭,对社会安全有着重要的意义,近些年来随着AI技术的快速发展,AI与各行各业有了很多成功的合作案例,这里主要的思想就是在无人机航拍视角的场景构想下开发构…
复杂背景下的低空无人机检测与跟踪算法
doi:10.11884/HPLPB202335.230026 大视场中的目标丢失后需要再次检测,但是大视场的检测比较耗时。但是根据实验发现丢失目标通常发生在无人机运动区域的320x320范围内,所以设计辅助网络,当目标丢失后,以320x320区域图像…

基于协作搜索算法的无人机航迹规划-附代码
基于协作搜索算法的无人机航迹规划 文章目录 基于协作搜索算法的无人机航迹规划1.协作搜索搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用协作搜索算法来优化无人机航迹规划。 …
利用无人机图像进行大豆田杂草检测的实例分割方法
Instance segmentation method for weed detection using UAV imagery insoybean fields 摘要1、介绍2、可见颜色指数3、结论摘要
作物杂草检测是精确农业的一个新领域,它可以区分理想和不理想的作物。 准确、高效的杂草检测与识别是精确杂草治理的基础。 本研究提出一种结合…
(四)七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖…
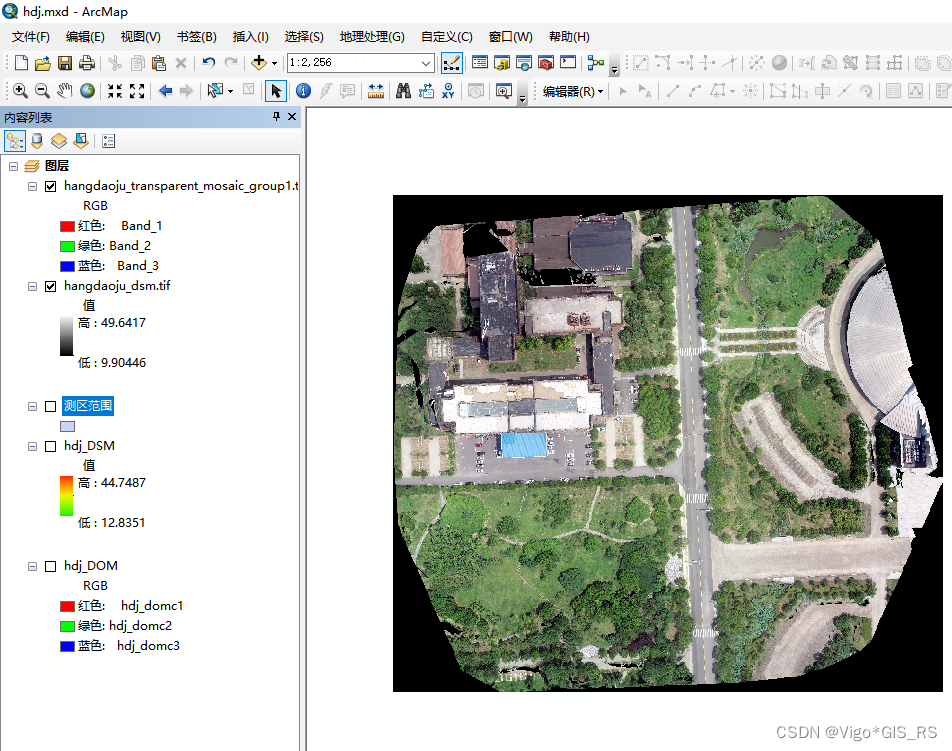
基于Pix4D使用无人机光学影像制作正射影像(DOM)和数字表面模型(DSM) 操作步骤
基于Pix4D使用无人机光学影像制作正射影像(DOM)和数字表面模型(DSM) 操作步骤 0. 前言1.获取无人机光学影像2.DOM和DSM3.操作步骤3.1 初始界面3.2 新建项目3.3查看处理过程报告3.4查看处理进度和成果 4.在ArcMap中打开DSM和DOM 0.…
2023年五一杯数学建模A题无人机定点投放问题求解全过程论文及程序
2023年五一杯数学建模
A题 无人机定点投放问题
原题再现: 随着科学技术的不断发展,无人机在许多领域都有着广泛的应用。对于空中执行定点投放任务的无人机,其投放精度不仅依赖于无人机的操作技术,而且还与无人机执行任务时所处状…
(五)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB代码)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、高尔夫优化算法GOA简介
高尔夫优化算法…
【AI视野·今日Robot 机器人论文速览 第五十九期】Fri, 20 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 20 Oct 2023 Totally 29 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
CCIL: Continuity-based Data Augmentation for Corrective Imitation Learning Authors Liyiming Ke, Yunchu Zhang, Abhay D…

无人巡检 | AIRIOT变电站无人机运防一体管理解决方案
传统的变电站安全管理存在着人力成本高、效率低、安全风险难以全面控制等问题,主要依靠人工巡检和监控设备,往往存在如下的运维问题和管理痛点:
巡检监控能力差:传统变电站管理系统无法对变电站进行全面的巡检监控,以…

复亚智能无人机机场适配最新大疆无人机
无人机已经在各个领域得到广泛应用,但由于操作难度、起降场地等问题,其应用范围和效率受到了一定限制。随着无人机机场研发技术的成熟,许多实际操作中的难题得以解决,使得无人机应用变得更加高效。接下来,我们将深入了…

第四期丨酷雷曼无人机技能培训
第4期无人机技能培训 2023年10月25日,酷雷曼无人机技能培训及执照考试第四期成功举办,自7月份首期开办以来,已按照每月一期的惯例连续举办四期,取得了极为热烈的反响。 随着无人机培训的重要性及影响力逐渐扩大,参加培…
(一)Tiki-taka算法(TTA)求解无人机三维路径规划研究(MATLAB)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、Tiki-taka算法(TTA…

阿木实验室PrometheusV1.1安装+Ubuntu 20.04
1. 安装ros-noetic 2. 安装Mavros包
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras3. GeographicLib
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh这里可以使用代理 :wg…
强化学习应用(六):基于Q-learning的无人机物流路径规划研究(提供Python代码)
一、Q-learning简介
Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的问题。它通过学习一个价值函数来指导智能体在环境中做出决策,以最大化累积奖励。
Q-learning算法的核心思想是通过不断更新一个称为Q值的…
基于群居蜘蛛算法的无人机航迹规划
基于群居蜘蛛算法的无人机航迹规划 文章目录 基于群居蜘蛛算法的无人机航迹规划1.群居蜘蛛搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用群居蜘蛛算法来优化无人机航迹规划。 …

守护青山绿水 千巡翼Q20无人机变身护林员
守护青山绿水 千巡翼Q20无人机变身护林员
无人机目前在林业上的应用主要在森林资源调查、森林资源监测、森林火灾监测、森林病虫害监测防治、野生动物监测等方面。传统手段在森林资源调查中需要耗费大量人力物力,利用无人机技术可快速获得所需区域高精度信息&#…
ROS无人机初始化GPS定位漂移误差,确保无人机稳定飞行
引言: 由于GPS在室外漂移的误差比较大,在长时间静止后启动,程序发布的位置可能已经和预期的位置相差较大,导致无法完成任务,尤其是气压计的数据不准,可能会导致无人机不能起飞或者一飞冲天。本文主要是在进…
(四)五种最新算法(SWO、COA、LSO、GRO、LO)求解无人机路径规划MATLAB
一、五种算法(SWO、COA、LSO、GRO、LO)简介
1、蜘蛛蜂优化算法SWO
蜘蛛蜂优化算法(Spider wasp optimizer,SWO)由Mohamed Abdel-Basset等人于2023年提出,该算法模型雌性蜘蛛蜂的狩猎、筑巢和交配行为&…
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---水平位置控制
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---水平位置控制前言水平位置控制串级P控制收敛结果收敛过程串级PID控制收敛结果收敛过程结果总结前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无…
基于STM32F1-C8T6无人机(二)——舵机/电调/空心杯电机/飞控/机架/subs接收机/充电器和电池(给出链接和思考)
文章目录一、关于电机的选择二、关于飞控三、看懂原理图的接线四、电机和桨叶五、机架六、sbus接收机的选择七、转向问题八、充电器和电池的选择主要参考STM32F103C8T6开发板GY521加速度计模块制作有刷四轴飞控,改造空心杯小四轴 b站up主:北郊强哥 一、关…
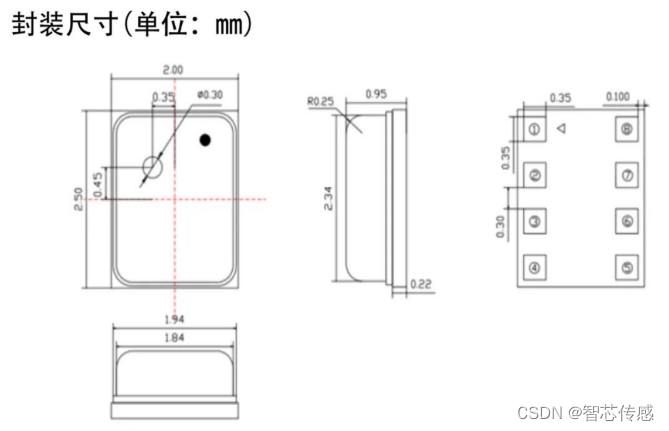
智芯传感MEMS压力传感器促进无人机跨入极其广阔的应用市场
2022年11月8日至13日,第十四届中国国际航空航天博览会在广东珠海国际航展中心举办。伴随着人工智能技术的进步,全球无人化装备的发展如火如荼。各式各样的无人机在无人化装备中可谓是一枝独秀,广受外界的高度关注。 据美国《Aviation Week&am…
(4)全局路径切换、换道策略
系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加 TODO:写完再整理 文章目录系列文章目录前言一、全局路径切换、换道策略(1)无人车整体路线切换策略(2)无人机切换到特定路径…
第三期丨酷雷曼无人机技能培训
第3期无人机技能提升培训
2023年9月15日,第三期酷雷曼合作商无人机技能提升培训圆满举办,数十位来自各地的合作商齐聚北京,在酷雷曼总部的帮助下学习无人机理论及实操知识,并成功取得权威认可的无人机飞行执照。本届培训会的新晋…
无人机集群飞行控制思考
说明: 该仅作为对无人机集群的控制的思考,并未进行实际测试,是一个笔记。 背景: 共有2架无人机(至少),需要完成起飞、执行任务、返回的一系列操作。起飞:使用RTK定位,保证…

无人机航测行业中常见名词解释,你都知道吗?
无人机航测具有机动灵活、高效快速、作业成本低、适用范围广、生产周期短等优势,目前主要应用于地形测绘、工程建设、土地资源调查、地质灾害应急处理、城市数字化建设等方面。下面就来了解一下无人机航测行业中的常见名词吧。
1、航片:利用航空摄影器拍…
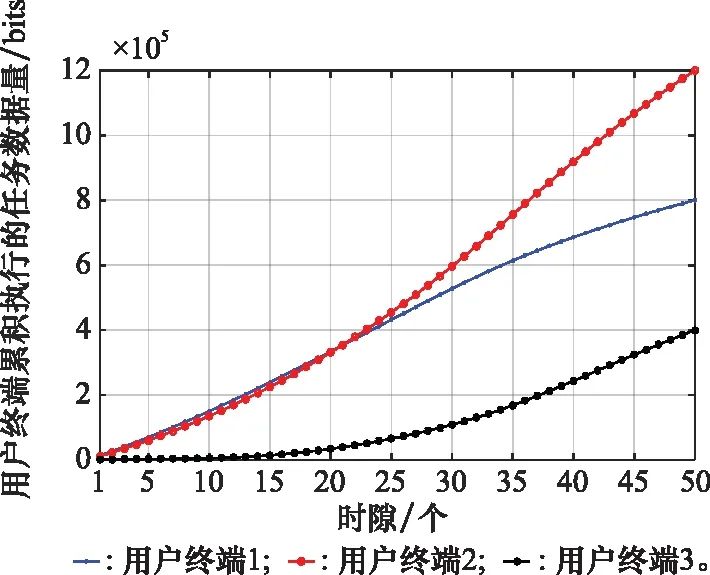
基于无人机辅助边缘计算系统的节能卸载策略
源自:《系统工程与电子技术》
作者:余雪勇 朱烨 邱礼翔 朱洪波
摘 要
针对复杂地形中地面基础设施无法有效提供可靠通信和密集算力的问题,首先提出一种基于无人机(unmanned aerial vehicle, UAV)托管计算资源的卸载方案。考虑用户终端的计算需…
11.6 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 乾元实验室2024届校招
校招 | 乾元实验室2024届校招 2、校招|国网电力空间技术有限公司2024届高校毕业生招聘
校招|国网电力空间技术有限公司2024届高校毕…
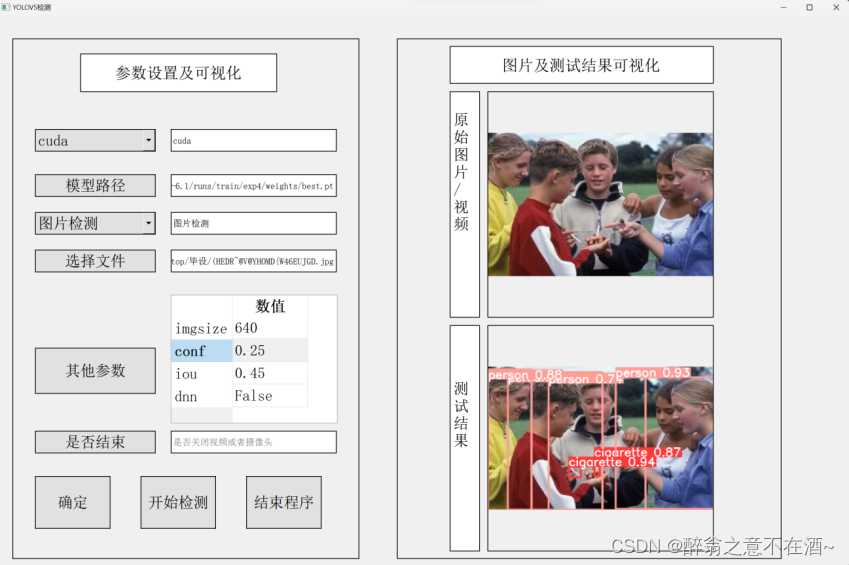
DjiTello + YoloV5的无人机的抽烟检测
一、效果展示 注:此项目纯作者自己原创,创作不易,不经同意不给予搬运权限,转发前请联系我,源码较大需要者评论获取,谢谢配合!
1、未启动飞行模型无人机的目标检测。 DjiTello YOLOV5抽烟检测 …
(5)(5.4) 给新飞行员的建议
文章目录 前言 1 首次飞行 2 首次飞行的建议 3 关于低电池的警告 前言
本页为那些只有有限或没有遥控飞机或多旋翼飞机飞行经验的人提供一些初始飞行策略的建议。 1 首次飞行
将旋翼飞机放在平地上,连接电池--在陀螺仪校准完成之前(LED 灯闪烁红色和蓝…

无人机飞行原理,多旋翼无人机飞行原理详解
多旋翼无人机升空飞行的首要条件是动力,有了动力才能驱动旋粪旋转,才能产生克服重力所必需的升力。使旋翼产生升力,进而推动多旋翼无人机升空飞行的一套设备装置称为动力装置,包括多旋翼无人机的发动机以及保证发动机正常工作所必…
超维空间S2无人机使用说明书——52、使用PID算法进行基于yolo的目标跟踪
引言:在实际工程项目中,为了提高系统的响应速度和稳定性,往往需要采用一定的控制算法进行目标跟踪。这里抛砖引玉,仅采用简单的PID算法进行目标的跟随控制,目标的识别依然采用yolo。对系统要求更高的,可以对…
Tello无人机飞控(Python)程序设计
Tello无人机飞控(Python)程序设计总结
1.py飞控库介绍
tello的几个不同的飞控库有什么区别吗,用哪个好些? Tello的几个不同飞控库主要是针对Python开发者提供的控制无人机的工具包,它们各有特点和使用方式。以下是对…

空中“千里眼” 复亚环保监测无人机助力生态保护
生态环境保护是全球共同关注的重要议题,为了持续改善环境、加强执法效能,复亚智能环保监测无人机在环保领域大显身手。该智能系统为环境执法人员提供了全新的工具,使其能够在无人机的“千里眼”下,及时发现和制止环境违法行为&…

基于人工大猩猩部队算法的无人机航迹规划-附代码
基于人工大猩猩部队算法的无人机航迹规划 文章目录 基于人工大猩猩部队算法的无人机航迹规划1.人工大猩猩部队搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用人工大猩猩部队算法…
(02)Cartographer源码无死角解析-(16) SensorBridge→回调函数之数据流向分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下(有兴趣的朋友可关注计算机视觉life 进行学习): (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

六旋翼无人机(飞行器)设计(lunwen+任务书+开题+文综+翻译及原文+cad图纸)
目 录 1 概论 1 1.2 国内外研究现状 1 1.3 主要研究内容 1 2六旋翼无人飞行器的结构分析与选择 3 2.1结构形式 3 2.2工作原理 3 2.3机架及桨叶的选择 4 2.3.1 单个桨叶空气动力分析及桨叶的选择 4 2.3.2材料的选择 6 2.3.3机架结构分析与优化 6 3电机 7 3.1电机的分类与介绍 7 …
10.机器人系统仿真(urdf集成gazebo、rviz)
目录 1 机器人系统仿真的必要性与本篇学习目的
1.1 机器人系统仿真的必要性
1.2 一些概念
URDF是 Unified Robot Description Format 的首字母缩写,直译为统一(标准化)机器人描述格式,可以以一种 XML 的方式描述机器人的部分结构,比如底盘…

基于入侵杂草算法的无人机航迹规划-附代码
基于入侵杂草算法的无人机航迹规划 文章目录 基于入侵杂草算法的无人机航迹规划1.入侵杂草搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用入侵杂草算法来优化无人机航迹规划。 …
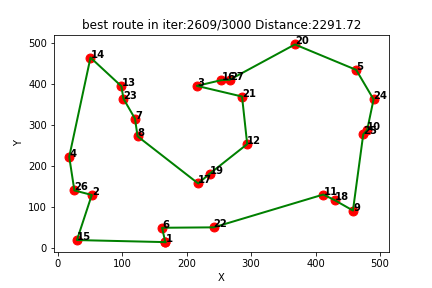
2023年深圳杯数学建模C题之无人机协同避障航迹规划附思路及参考代码
一、题目
平面上A、B两个无人机站分别位于半径为500 m的障碍圆两边直径的延长线上,A站距离圆心1 km,B站距离圆心3.5 km。两架无人机分别从A、B两站同时出发,以恒定速率10 m/s飞向B站和A站执行任务。飞行过程中两架无人机必须避开障碍圆、并且不得碰面(即两架无人机的连线必…

复亚消防无人机 智能守护浙江安防
在党中央高度重视防灾减灾救灾工作的背景下,浙江省深化消防救援保障体系建设,借助智慧消防举措,提高了城市的战勤保障能力。特别是在古城区,复亚助力浙江打造智慧消防系统,通过消防无人机全自动飞行系统,成…
Ubunutu18.04 ROS melodic 无人机 XTDrone PX4 仿真平台配置
一、依赖安装
sudo apt install ninja-build exiftool ninja-build protobuf-compiler libeigen3-dev genromfs xmlstarlet libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python-pip python3-pip gawk
pip2 install pandas jinja2 pyserial cerberus pyulog0.7.0 n…
一种改进多旋翼无人机动态仿真的模块化仿真环境研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
什么!复杂环境下的编队控制问题还能这样解决?
恭喜南京航空航天大学-王志伟同学,在参与阿木实验室校园赞助-Prometheu技术文章创作活动中成功入选,将获得阿木实验室现金奖励500元!现将相关文章内容分享给大家,鼓励更多的同学加入到我们校园赞助活动中来!
近年来&a…
10.12 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 2024届秋招,美团哪些校招岗位最缺人?(内推)
校招 | 2024届秋招,美团哪些校招岗位最缺人?(内推&…

基于减法平均算法的无人机航迹规划-附代码
基于减法平均算法的无人机航迹规划 文章目录 基于减法平均算法的无人机航迹规划1.减法平均搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用减法平均算法来优化无人机航迹规划。 …
11.1 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招|盒马未来星计划启动招聘
校招|盒马未来星计划启动招聘 2、校招 | 中科南京创研院2024校招启航
校招 | 中科南京创研院2024校招启航 3、校招|普门…

无人机新手防炸飞行技巧
不要在室内飞行,容易撞墙。起飞前设置好避障和返航模式。使用模拟器熟练掌握操控。选择开阔环境目视起飞。使用低速档平稳飞行。合理使用避障功能,不要盲目依赖。使用九宫格避障法。留意电量,及时返航。极低电量时放弃强行返航。飞行后及时为电池充电保养。
无人机航迹规划:五种最新智能优化算法(GRO、SWO、COA、LSO、KOA)求解无人机路径规划MATLAB
一、五种算法(GRO、SWO、COA、LSO、KOA)简介
1、淘金优化算法GRO
淘金优化算法(Gold rush optimizer,GRO)由Kamran Zolf于2023年提出,其灵感来自淘金热,模拟淘金者进行黄金勘探行为。VRPTW&am…

智慧港口与无人机巡逻技术:走进未来的海上交通枢纽
在21世纪,随着全球贸易的日益繁荣,港口作为连接世界各地的重要交通枢纽显得尤为重要。为了提高港口的效率和安全性,智慧港口和无人机巡逻技术成为了最前沿的选择。其中,复亚智能无人机技术在智慧港口的建设和日常运营中扮演了至关…

基于黑寡妇算法的无人机航迹规划-附代码
基于黑寡妇算法的无人机航迹规划 文章目录 基于黑寡妇算法的无人机航迹规划1.黑寡妇搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用黑寡妇算法来优化无人机航迹规划。 1.黑寡妇…
10.17 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 优必选科技2024届校园招聘(内推)
校招 | 优必选科技2024届校园招聘(内推) 2、2023校招总结--SLAM算法 -15
2023校招总结--SLAM算法…
多目标应用:基于非支配排序的蜣螂优化算法NSDBO求解微电网多目标优化调度(MATLAB)
一、微网系统运行优化模型
微电网优化模型介绍:
微电网多目标优化调度模型简介_IT猿手的博客-CSDN博客
二、基于非支配排序的蜣螂优化算法NSDBO
基于非支配排序的蜣螂优化算法NSDBO简介:
https://blog.csdn.net/weixin46204734/article/details/128…
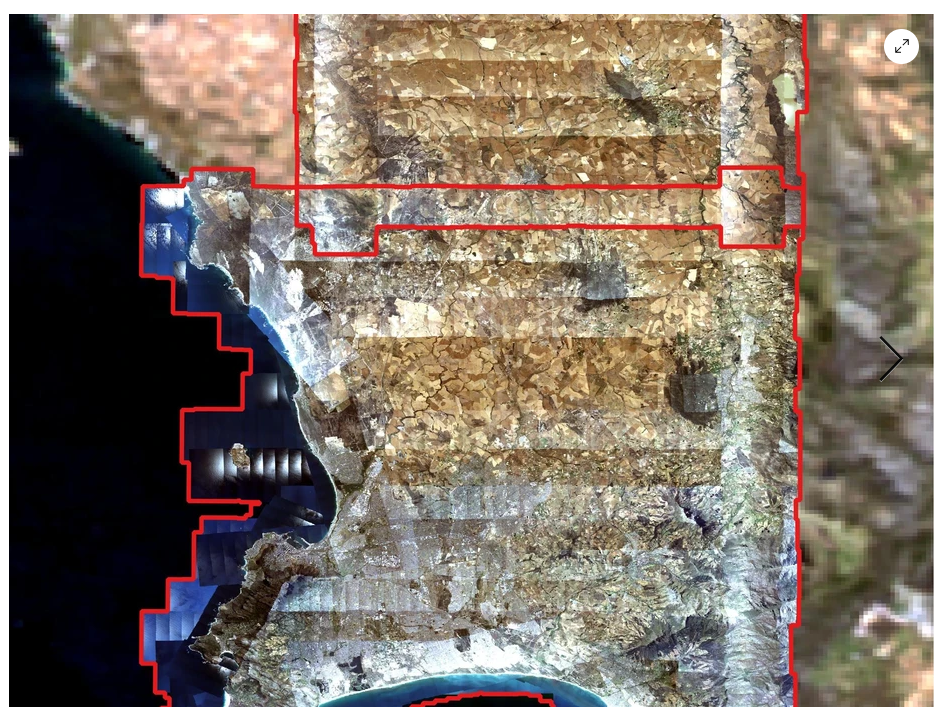
正射影像矫正--基于无人机图片
1.大致总体过程
这是通过为每个较小的正射影像定义一个多边形来实现的,这些多边形由接缝线分隔。要创建初始的接缝线网络,可以使用 Voronoi 图算法。
以下是该过程的概述:
小正交图像: 从一些较小的正交图像开始。
接缝线&…
多目标水母搜索算法(MOJS)求解微电网优化MATLAB
一、微网系统运行优化模型
微电网优化模型介绍:
微电网多目标优化调度模型简介_IT猿手的博客-CSDN博客
二、多目标水母搜索算法MOJS
多目标水母搜索算法(Multi-Objective Jellyfish Search algorithm,MOJS)由Jui-Sheng Chou等…

四川开启智能巡河形式,无人机水利行业应用再创新
在四川省某区域,复亚智能无人机系统以其独特的机场网格化部署得到成功应用,覆盖了该区域内多条市级、省级河流,成为水利行业的新亮点。这一先进系统以无人机水利行业应用为核心,通过网格化和信息化手段,实现了对水域环…

如何精准操作无人机自动停机坪?
无人机自动停机坪通过自主导航和避障功能,实现了无人机的自主降落和起飞,在无人机技术领域起到了至关重要的作用。停机坪不仅仅是无人机的起降平台,还具备自动换电或充电等功能,为无人机的自动化提供了关键支持。为更有效地操作无…
(一)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、高尔夫优化算法GOA简介
高尔夫优化算法…

复亚智能落地江苏化工,安防巡逻无人机守牢“安全线”
化工业是国民经济的重要组成部分,但其生产环境和条件充满了挑战。大部分化学反应发生在高温、高压且有毒的环境中,而近70%的原料、中间体和终产品都带有易燃、易爆、有毒、有害以及腐蚀性的特性。在这样的情境下,安全生产不仅仅是一项日常任务…
多旋翼无人机组合导航系统-多源信息融合算法(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
(1)(1.4) ESP32 wifi telemetry
文章目录
前言
1 用于ESP32的DroneBridge
2 推荐的硬件
3 下载和烧录固件
4 为ESP32配置DroneBridge 前言
ESP32 是现成的 Wi-Fi 模块,具有完整的 TCP/IP 协议栈和微控制器功能。它们提供专用的 UART、SPI 和 I2C 接口。它们可与任何 ArduPilot 自动驾驶控制器…

无人机巡山护林,林业无人机智能助力绿色守护
随着全球环保意识的不断提高,无人机巡山护林已经成为解决森林巡检难题的一种独特而高效的方式。在我国,各地正积极探索无人机在森林防火、病虫害监测以及生态调查等领域的创新应用。随着无人机技术的不断演进,其在推动森林保护和可持续发展方…

单目标应用:蜣螂优化算法DBO与麻雀搜索算法SSA求解无人机三维航迹规划(提供Matlab代码)
一、无人机三维航迹规划
三维航迹规划是无人机在执行任务过程中的非常关键的环节,三维航迹规划的主要目的是在满足任务需求和自主飞行约束的基础上,计算出发点和目标点之间的最佳航路。
1.1路径最短约束
无人机航迹规划的首要目标是寻找起飞点和目标点…
(02)Cartographer源码无死角解析-(55) 2D后端优化→ComputeLocalToGlobalTransform()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(56) 2D后端优化→class MapById、MapById::lower_bound
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
无人机动力测试台:150kg级-Flight Stand 150
“飞行汽车”被人们广泛视为下一代交通工具。从2022年初至今,eVTOL(电动垂直起降飞行器)产业乃至整个UAM(城市间空中交通)市场呈现爆发式增长——各国航空制造企业纷纷入局,不断有新产品问世、试飞或试运行…
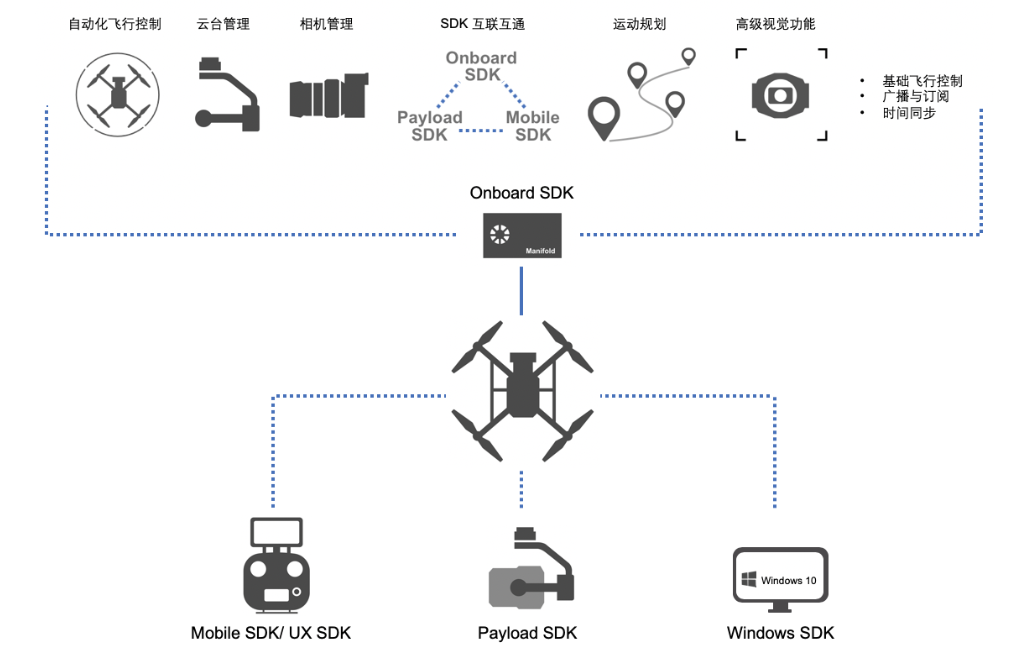
DJI ROS dji_sdk 源码分析|整体框架
DJI ROS dji_sdk 源码分析|整体框架launch文件CMakeLists.txtcpp文件main.cppOSDK 是一个用于开发无人机应用程序的开发工具包,基于OSDK 开发的应用程序能够运行在机载计算机上(如Manifold 2),开发者通过调用OSDK 中指定的接口能够…
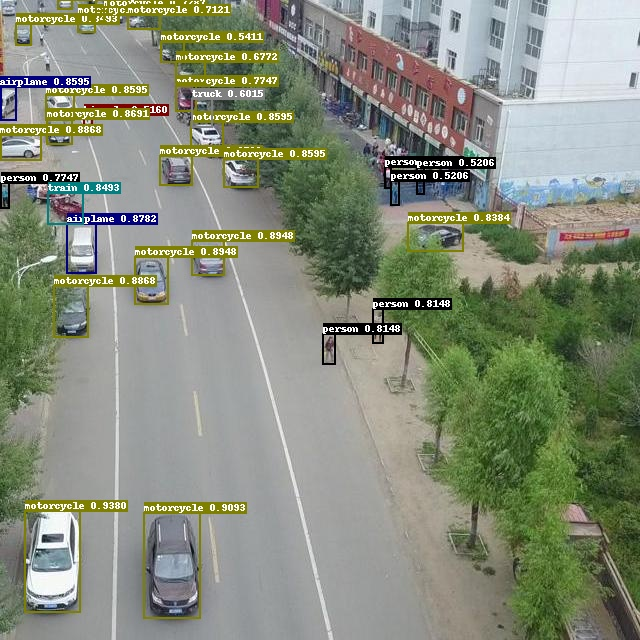
无人机巡检场景小目标检测与量化加速部署方案详解
在社会活动和社会生产中,巡检是一个必不可少的环节。然而,传统的人工巡检方式存在效率低下、成本高昂、安全风险大等问题,限制了巡检的效果和范围。无人机巡检因其高效、灵活、安全的特点被越来越多的企业采用。但是,如何在无…
【SCI征稿】2区无线网络类SCIEI, CCF推荐,3个月左右录用~
一、期刊简介:
2区无线网络类SCI &EI
【期刊概况】IF:2.0-3.0, JCR2/3区, 中科院4区;
【终审周期】走期刊部系统,3个月左右录用;
【检索情况】SCI&EI双检;
【数据库收录年份】1967年;
【国人…

固定翼无人机1:500地籍
引言 上几期,睿铂为大家推送了两篇相对精度验证的文章,其优秀的成果引来了业界人士不少的赞叹。同时,许多客户朋友又提出了更高的要求。目前,在地籍精度的项目中,使用多旋翼无人机挂载倾斜摄影相机作业,是能…
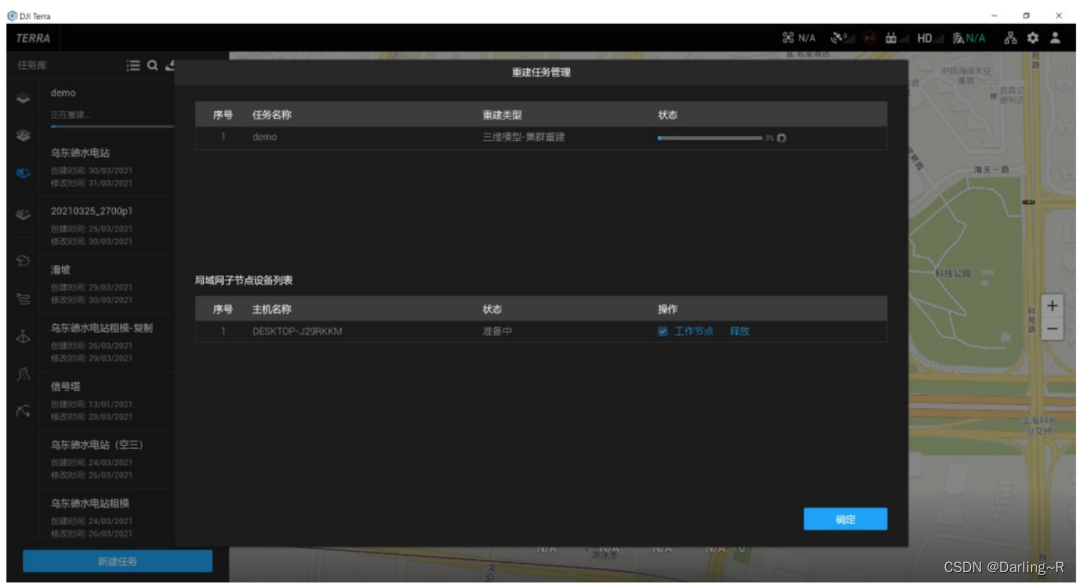
大疆无人机空三建模干货分享(大疆智图集群建模超详细教程)
Part 01 大疆无人机空三建模干货分享(大疆智图集群建模超详细教程) 大疆智图集群简介
大疆在今年5月推出的智图3.0.0及以上版本中加入了集群功能,有集群版许可的用户可以使用此功能。智图集群是由一台主节点分配任务控制多台同局域网内子节点设备进行空三和建模。集…
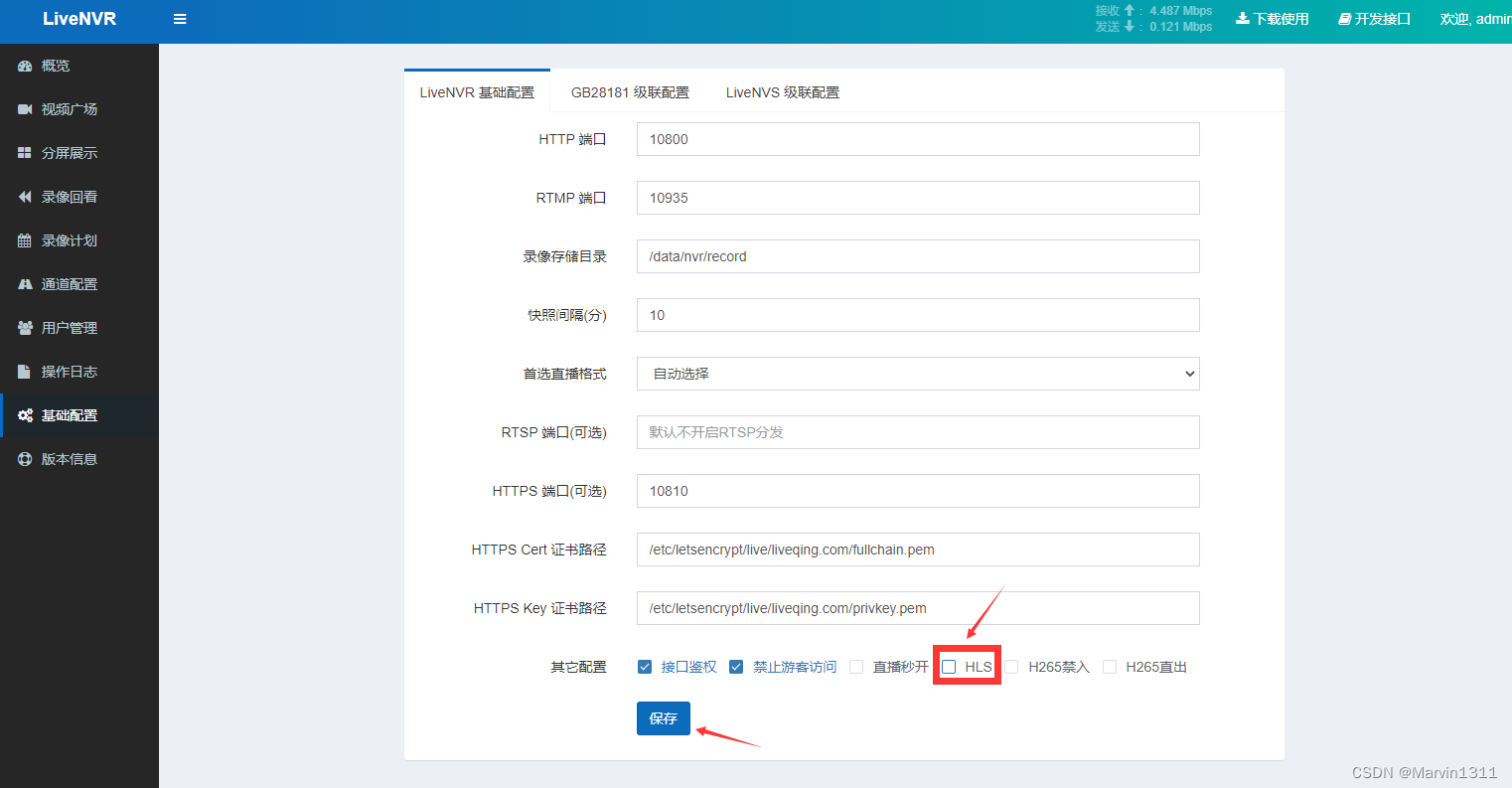
LiveNVR视频平台接收无人机等移动终端RTMP推流后转成GB28181协议输出级联到GB28181视频平台的操作说明...
1、需求介绍 目前很多移动终端设备(如无人机等)只支持RTMP推流输出,不支持GB28181协议。但是又有需要通过GB28181协议接入到视频平台的需求。比如有些大疆无人机产品不能直接注册国标平台,只能rtmp推流。那么,项目中如果将无人机的rtmp的推流…
多旋翼无人机振动分析与减振方法
多旋翼无人机振动分析与减振方法 振动分析无人机减振设计机械减振数字滤波减振 振动分析
振动机制包括:
激励(振动源)系统响应
无人机振动机制:
激励 —— 动力系统(旋翼电机)系统 —— 机架响应 —— …
(01)ORB-SLAM2源码无死角解析-(02)C++命名规范_总体框架解读
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

基于北方苍鹰算法的无人机航迹规划-附代码
基于北方苍鹰算法的无人机航迹规划 文章目录 基于北方苍鹰算法的无人机航迹规划1.北方苍鹰搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用北方苍鹰算法来优化无人机航迹规划。 …
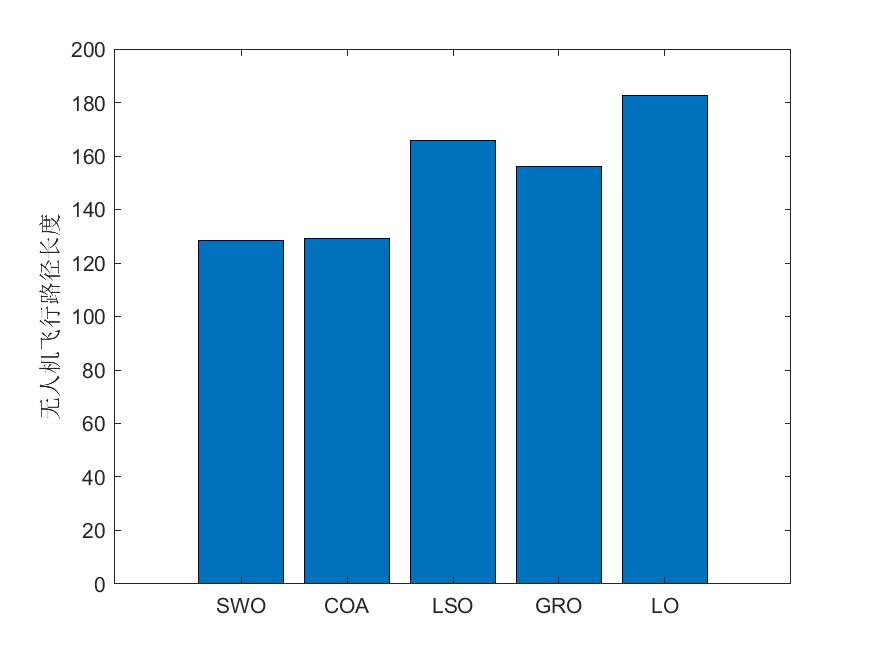
(二)五种最新算法(SWO、COA、LSO、GRO、LO)求解无人机路径规划MATLAB
一、五种算法(SWO、COA、LSO、GRO、LO)简介
1、蜘蛛蜂优化算法SWO
蜘蛛蜂优化算法(Spider wasp optimizer,SWO)由Mohamed Abdel-Basset等人于2023年提出,该算法模型雌性蜘蛛蜂的狩猎、筑巢和交配行为&…
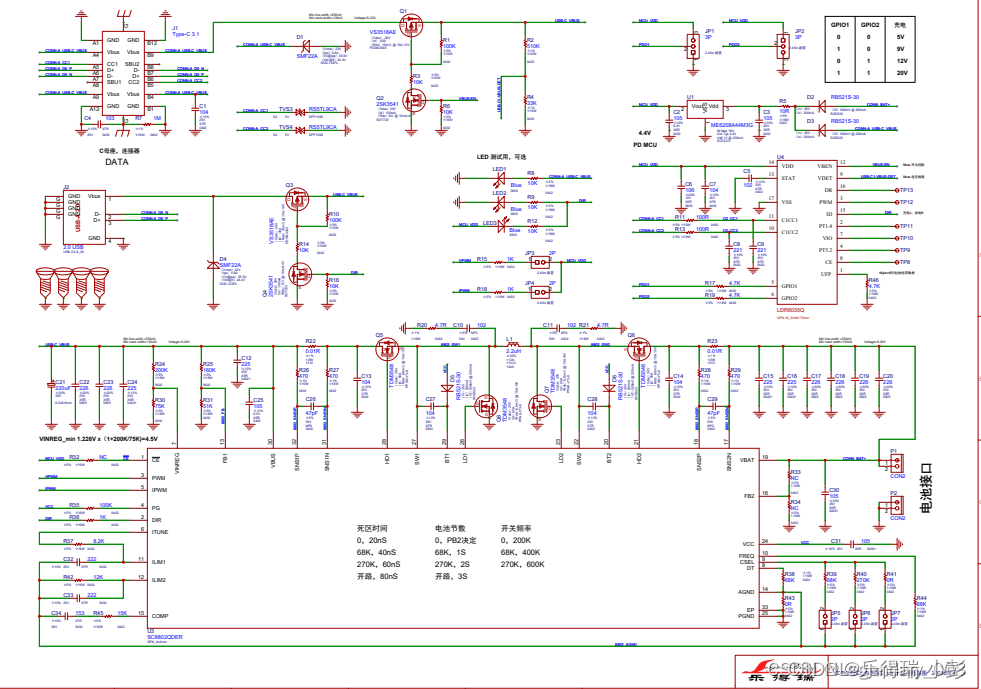
TYPE-C接口设备实现DRP+OTG功能芯片
随着USB-C接口的普及,欧盟的法律法规强制越来越多的设备开始采用这种接口。由于 USB-C接口的高效性和便携性,使各种设备之间的连接和数据传输变得非常方便快捷,它们不仅提供了强大的功能,还为我们的日常生活和工作带来了极大的便利…

yolov5旋转目标检测-遥感图像检测-无人机旋转目标检测(附代码和原理)
目前,无人机技术的快速发展带来了遥感图像处理领域的革命性改变。然而,由于无人机在飞行时可能会出现旋转的情况,因此对于旋转目标的检测也成为了一个重要的问题。针对这个问题,yolov5可以提供一种高效的解决方案。 以下是介绍的分…
Ubunutu18.04 ROS melodic 无人机 XTDrone PX4 Vins-Fuison 运行配置
一、PX4飞控EKF配置
PX4默认使用的EKF配置为融合GPS的水平位置与气压计高度。如果我们想使用视觉定位,就需要把修改配置文件。让EKF融合来自mavros/vision_pose/pose的数据
1.1修改rcS配置文件
gedit ~/PX4_Firmware/ROMFS/px4fmu_common/init.d-posix/rcS 通过注…
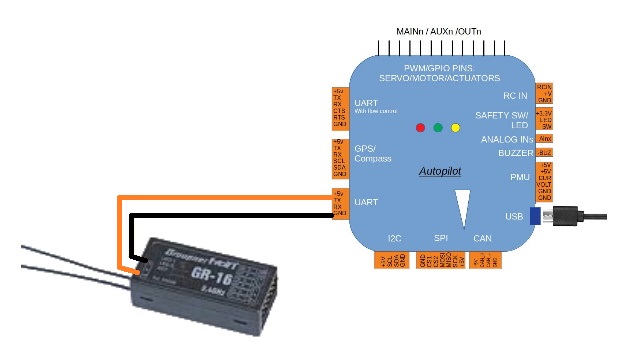
(1)(1.7) HOTT telemetry
文章目录
前言
1 布线和设置
2 参数说明 前言
Plane-4.0.0(及更高版本)、Copter-4.0.4(及更高版本)和 Rover-4.1.0(及更高版本)支持 Graupner HOTT 遥测技术。 1 布线和设置
与自动驾驶仪的连接可通过…
无人机在融合通信系统中的应用
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,现今无人机在航拍、农业、快递运输、测绘、新闻报道多个领域中都有深度的应用。 在通信行业中,无人机广泛应用于交通,救援,消…
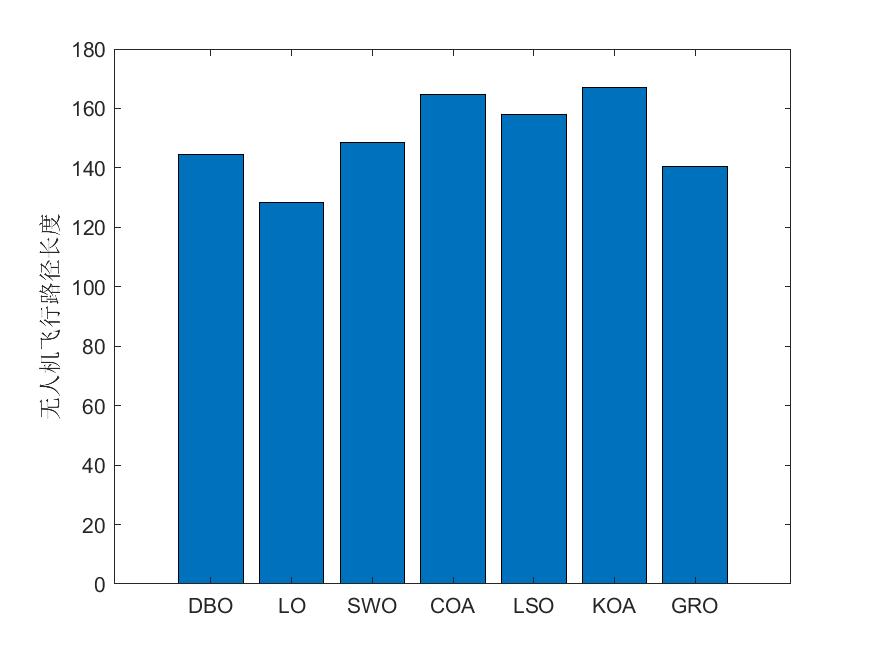
无人机航迹规划(五):七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…

无人机除冰保障电网稳定运行
无人机除冰保障电网稳定运行
近日,受低温雨雪冰冻天气影响,福鼎市多条输配电线路出现不同程度覆冰。
为保障福鼎电网安全可靠运行,供电所员工运用无人机飞行技术,通过在无人机下方悬挂器具,将无人机飞到10千伏青坑线…
(2)(2.11) RFD900
文章目录
前言
1 概述
2 主要功能
3 状态LED指示灯
4 接口
5 使用Mission Planner进行配置
6 支持不同国家/地区
7 讨论论坛 前言
RFD900 无线电调制解调器是一款高功率 900Mhz ISM 波段无线电调制解调器,设计用于远距离串行通信。据报道,其通信…

【全网首发】【Python】Python控制parrot ARDrone 2.0无人机
🎉欢迎来到Python专栏~Python控制parrot ARDrone 2.0无人机 ☆* o(≧▽≦)o *☆嗨~我是小夏与酒🍹 ✨博客主页:小夏与酒的博客 🎈该系列文章专栏:Python学习专栏 文章作者技术和水平有限,如果文中出现错误…
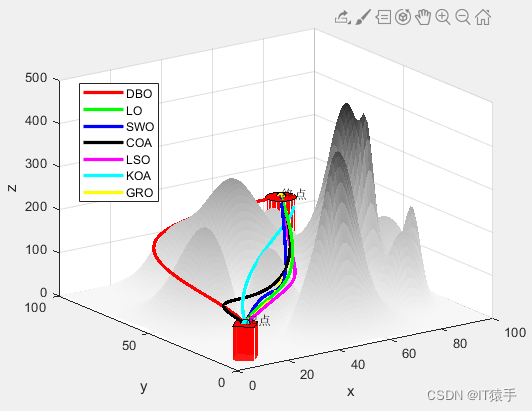
无人机航迹规划MATLAB:七种优化算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…

DL/T1578-2021电力线路多旋翼无人机巡检系
DL/T1578-2021电力线路多旋翼无人机巡检系
DL/T 1578—2021标准的发布和实施对于架空电力线路的巡检工作具有里程碑式的意义。它不仅填补了多旋翼无人机巡检系统在行业标准方面的空白,还为电力行业提供了一套完整、科学的测试和评估方法。这将有助于提高架空电力线…

无人机交付:跨境电商的数字化未来
随着科技的不断进步,跨境电商行业正经历着前所未有的数字化变革。其中,无人机交付正成为这一领域的未来之路,为电商企业和消费者带来了新的便利和机遇。本文将深入探讨无人机交付在跨境电商中的应用,以及它如何塑造数字化未来。 无…
超维空间S2无人机使用说明书——21、VINS视觉定位仿真
引言:为了实现室内无人机的定位功能,S系列无人机配置了VINS-FUSION定位环境,主要包含了仿真跑数据集和实际操作部分。为了提前熟悉使用原理,可以先使用仿真环境跑数据集进行学习和理解
硬件:1080P显示器、Jetson orin…
航母编队反无人机蜂群作战能力需求分析
源自:指挥控制与仿真
作者:樊辉锦、巫银花、毕月、苏泽亚
“人工智能技术与咨询” 发布 声明:公众号转载的文章及图片出于非商业性的教育和科研目的供大家参考和探讨,并不意味着支持其观点或证实其内容的真实性。版权归原作者所有ÿ…

无人机遥感技术在地质灾害监测应用分析,多旋翼无人机应急救援技术探讨
地质灾害是指在地球的发展演变过程中, 由各种自然地质作用和人类活动所形成的灾害性地质事件。给人民的生命和财产安全带来严重威胁,因此有必要开展地质灾害预测预报、灾害应急和风险区划
遥感技术的快速发展为我们提供了一种获取实时灾害信息的可靠手段…

(2)(2.13) Rockblock Satellite Modem
文章目录
前言
1 支持的MAVLink命令信息
2 设置
3 使用方法
4 数据成本
5 参数 前言
!Note
该功能仅适用于 ArduPilot 4.4 或更高版本,并且要求飞行控制器支持 LUA 脚本(LUA Scripts)。 RockBLOCK 卫星调制解调器可实现与 ArduPilot 飞行器的全球…

揭秘!SpireCV如何实现低延时推流、视频保存!
引言
视频推流是指将实时的音视频数据通过网络传输到服务器或其他终端设备的过程。
在无人机上则是通过搭载摄像头或录像设备,通过无线网络将实时拍摄到的视频数据传输到地面站或其他终端设备,使操作人员能够实时监视无人机所处位置的环境,…
全套军事和民用监听系统
Python全套军事和民用监听系统的研发开发具有重要性的原因如下: 监听系统在军事和民用领域中具有广泛的应用。军事方面,监听系统可用于收集敌方情报、监测通信网络、进行电子战等,对于提高作战效能和获取情报优势至关重要。民用方面ÿ…

系留无人机的发展与应用场景分析,系留旋翼无人机技术难点分析
传统无人机的局限
随着无人机民用市场的扩大,无人机的功能愈加多样化,被广泛应用于搜救、公共安全、农林、摄像娱乐等多领域。民用市场的扩大使传统无人机面临很多技术难题,诸如定位、通讯、交互技术等等,其中最主要的是续航问题…

不同控制方式下的无人机二维码识别降落对比
无人机技术的快速发展正在推动众多行业的革新,从农业监测、灾害响应到城市规划和物流配送,无人机的应用前景无限广阔。随着应用场景的多样化,无人机精准降落成为一大挑战。基于PX4飞控固件和ROS系统的开源自主无人机平台Prometheus应运而生。…
2024.2.4 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | OPPO 2024届春招 研发类岗位专场(内推)
校招 | OPPO 2024届春招 研发类岗位专场(内推) 2、校招 | 中电智能科技有限公司2024校园…
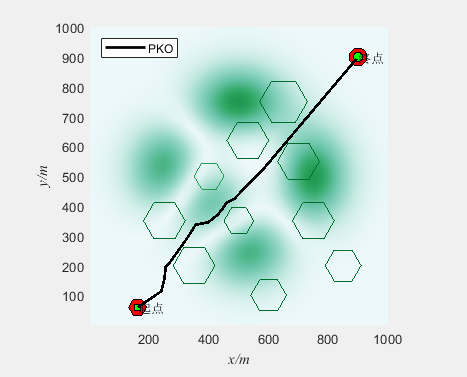
基于斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO)的无人机三维路径规划(MATLAB)
一、无人机路径规划模型介绍 二、算法介绍
斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO),是由Abdelazim Hussien于2024年提出的一种基于群体的新型元启发式算法,它从自然界中观察到的斑翠鸟独特的狩猎行为和共生关系中汲取灵…
(3)(3.5) 遥测无线电区域条例
文章目录
前言
1 支持不同国家/地区 前言
本专题列出了每个国家/地区可用的主要频率,并列出了无线电设备。
!Note
合规是你的责任。检查无线电是否符合所在地区/国家的频率、跳频信道和功率级别规定。 !Tip
我们很乐意在此表中添加更多…

IMU用于无人机故障诊断
最近,来自韩国的研究团队通过开发以IMU为中心的数据驱动诊断方法,旨在多旋翼飞行器可以自我评估其性能,即时识别和解决推进故障。该方法从单纯的常规目视检查跃升为复杂的诊断细微差别,标志着无人机维护的范式转变。
与依赖额外传…
无人机自主寻优降落在移动车辆
针对无人机寻找并降落在移动车辆上的问题,一套可能的研究总体方案: 问题定义与建模: 确定研究的具体范围和目标,包括无人机的初始条件、最大飞行距离、允许的最大追踪误差等。建立马尔科夫决策过程模型(MDP)…

0_项目git地址——正点原子minifly与crazyflie
1、说明:
在每个专栏的第一篇文章,笔者都会贴出项目的git地址,方便后来者学习和复现; 下面介绍两个项目的官网资料和git地址,最后给出两者的对比;
2、正点原子minifly
(1)minifly官网资料下载中心&#…

ROS无人机开发常见错误
飞控部分
一、解锁时飞控不闪红灯,无任何反应,地面站也无报错
解决办法:
打开地面站的遥控器一栏
首先检查右下角Channel Monitor是否有识别出遥控各通道的值,如果没有,检查遥控器是否打开,遥控器和接收…

0基础学习VR全景平台篇第137篇:720VR全景,DJI无人机遥控器调参
上课!全体起立~
大家好,欢迎观看蛙色官方系列全景摄影课程!
这节课以御2为例 介绍的是无人机调参
步骤一:下载DJI Go 4并注册账号
步骤二:拿下遥杆并装好,展开遥控天线。将无人机与遥控器相连ÿ…
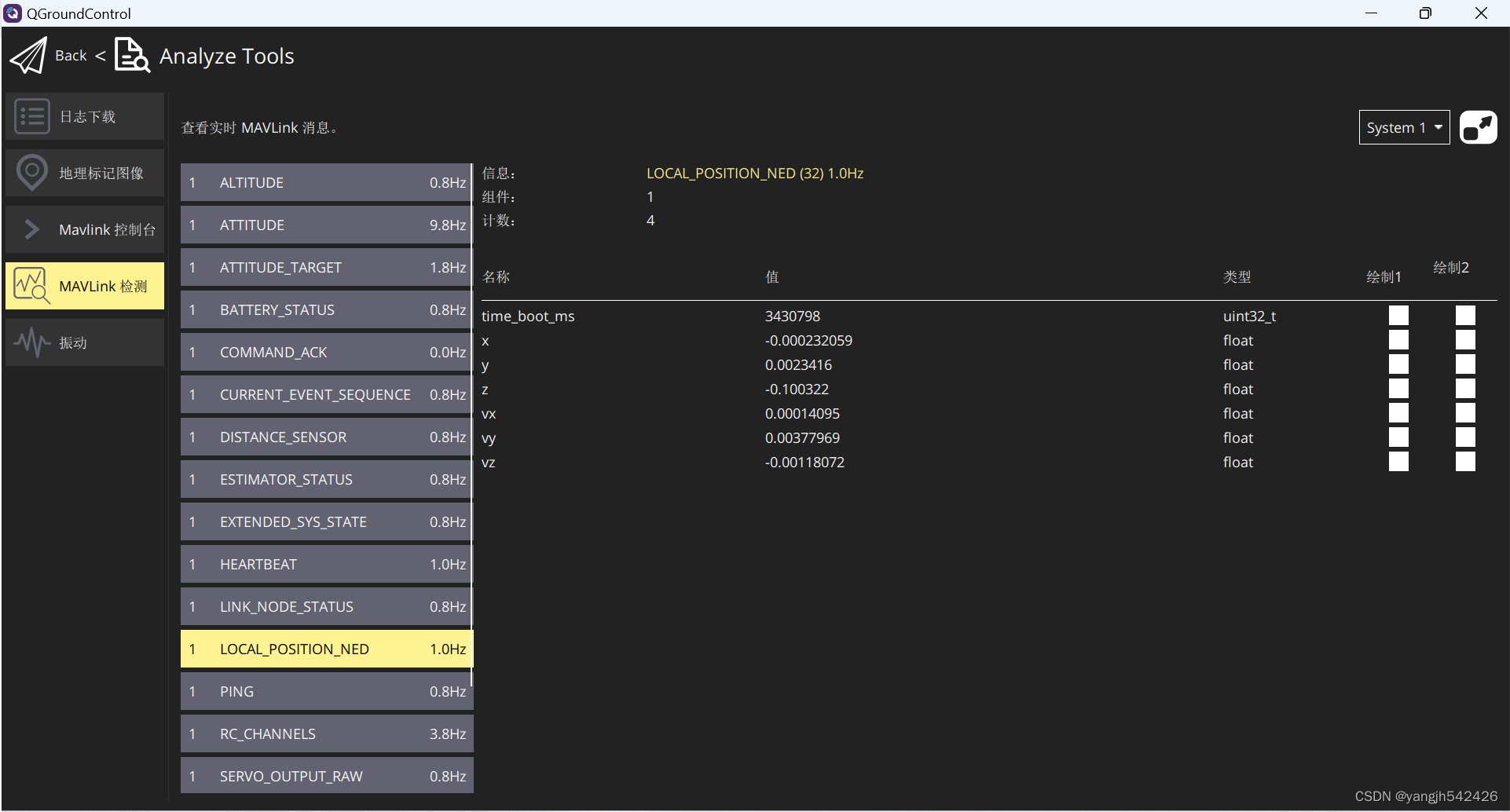
PX4|基于FAST-LIO mid360的无人机室内自主定位及定点悬停
目录 前言环境配置运行fast-lio修改px4位置信息融合方式编写位置坐标转换及传输节点 前言
在配置mid360运行环境后,可使用mid360进行室内的精准定位。
环境配置
在livox_ros_driver2的上级目录src下保存fast-lio的工程
git clone https://github.com/hku-mars/F…
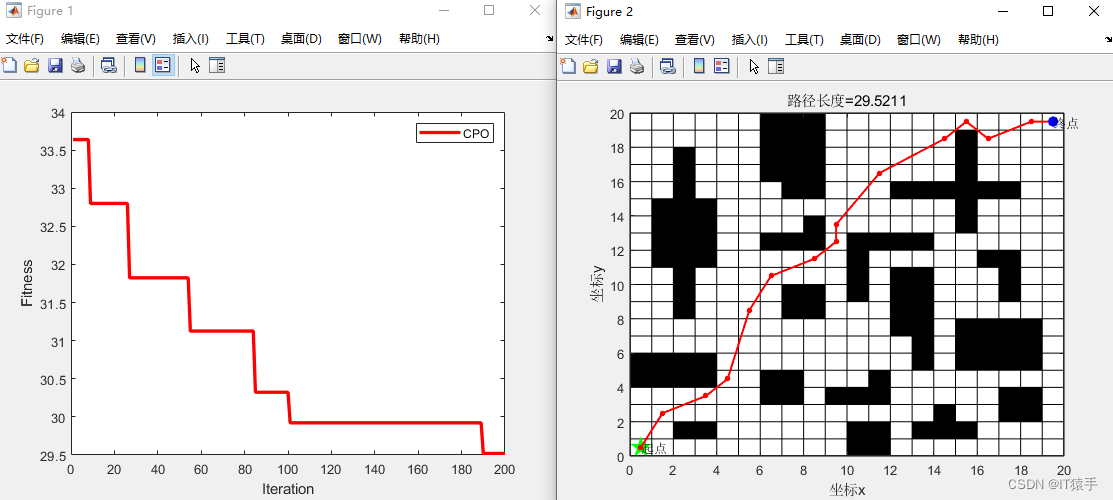
机器人路径规划:基于冠豪猪优化算法(Crested Porcupine Optimizer,CPO)的机器人路径规划(提供MATLAB代码)
一、机器人路径规划介绍
移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或…
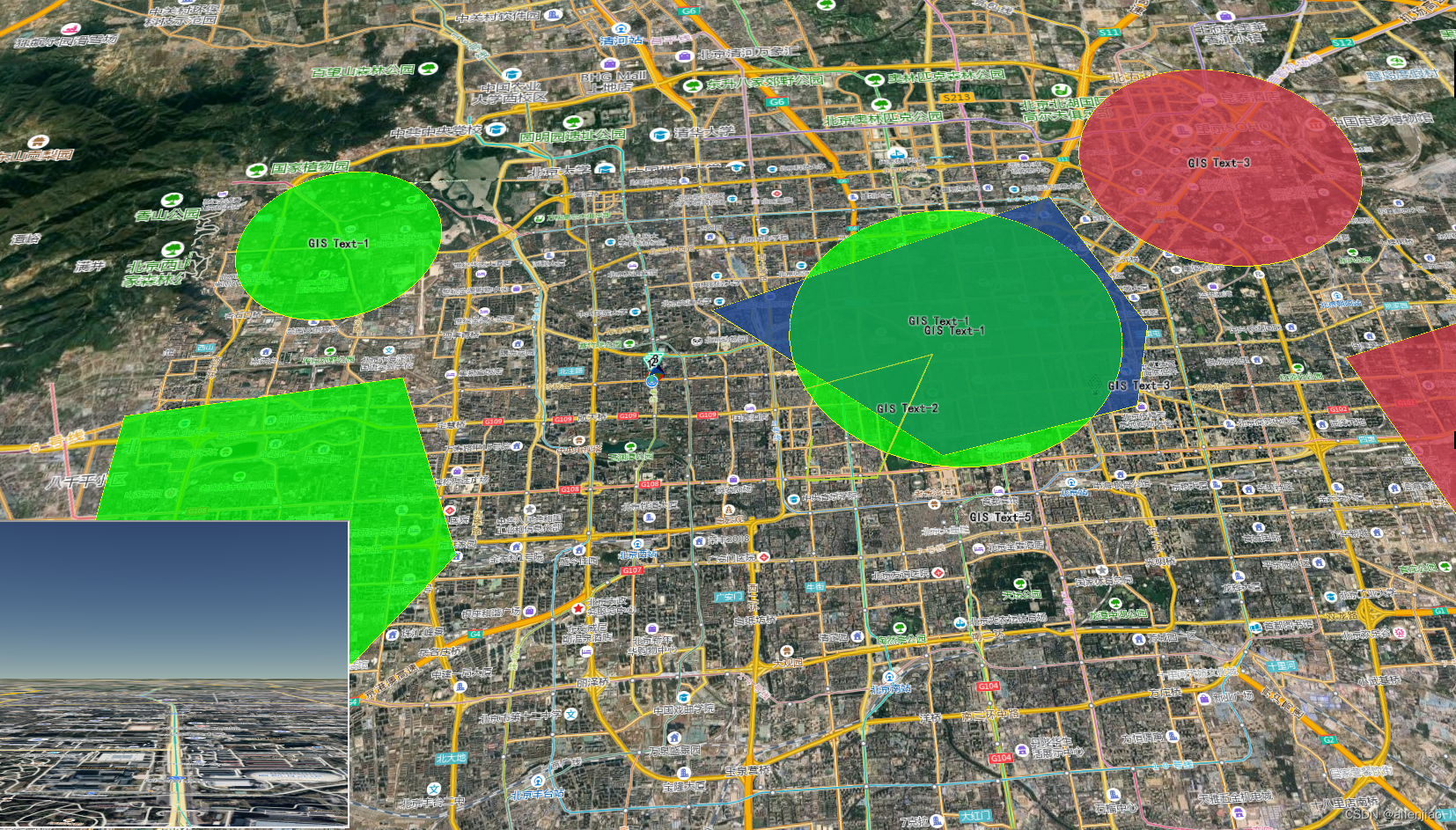
WebGIS航线编辑器(无人机航线规划)
无人机航点、航线规划,实现全自动航点飞行作业及飞行航拍。禁飞区、作业区功能保障飞行安全。 GIS引擎加载 const viewer new Cesium.Viewer("cesiumContainer", { imageryProvider: new Cesium.IonImageryProvider({ assetId: 3872 }), });
const im…
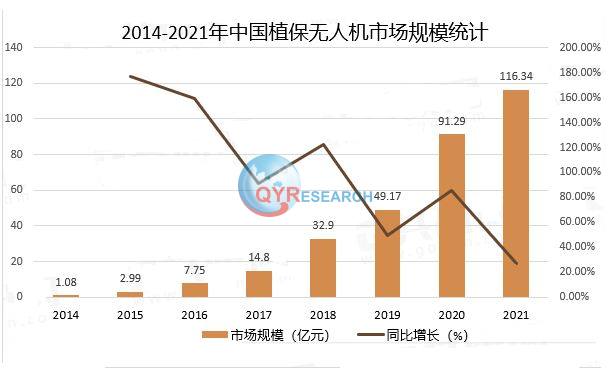
农业无人机行业分析:单年内作业量突破13亿亩次
面对我国18亿亩的耕地植保市场需求,未来我国植保无人机将依然保持快速发展态势,预计2022年我国植保无人机销量将增长至8万架。
植保无人机市场呈现爆发式增长,同时也吸引了不少企业进入,我们从2022年植保无人机企业网络热度榜中可…

(2)(2.4) TerraRanger Tower/Tower EVO(360度)
文章目录
前言
1 安装传感器并连接
2 通过地面站进行配置
3 参数说明 前言
TeraRanger Tower 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用距离约为 4.5m。
TeraRanger Tower EVO 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用…
Python在小型无人机
Python在小型无人机的发展和研发中具有重要性。以下是几个原因: 简单易学:Python是一种简单易学的编程语言,具有简洁的语法和易于理解的语言结构。这使得开发人员可以更快速地理解和编写代码,从而加快了研发的进程。 多用途性&am…

无人机应用场景和发展趋势,无人机技术的未来发展趋势分析
随着科技的不断发展,无人机技术也逐渐走进了人们的生活和工作中。无人机被广泛应用于很多领域,例如遥感、民用、军事等等。本文将围绕无人机技术的应用场景和发展趋势,从多角度展开分析。
无人机技术的应用场景
无人机在遥感方面的应用&…
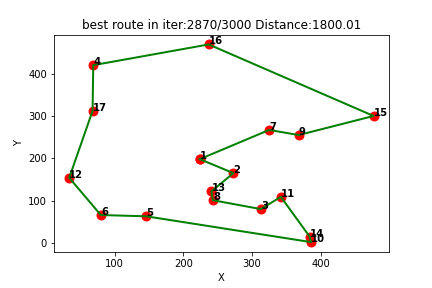
强化学习应用(五):基于Q-learning的无人机物流路径规划研究(提供Python代码)
一、Q-learning简介
Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的问题。它通过学习一个价值函数来指导智能体在环境中做出决策,以最大化累积奖励。
Q-learning算法的核心思想是通过不断更新一个称为Q值的…
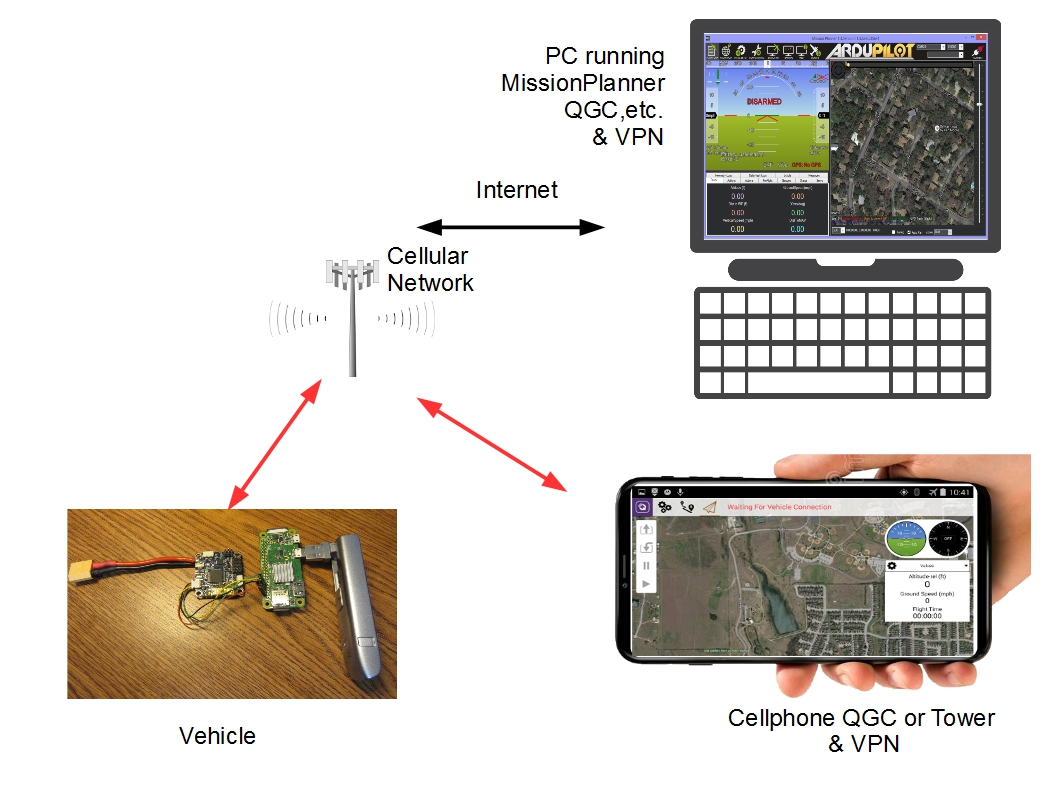
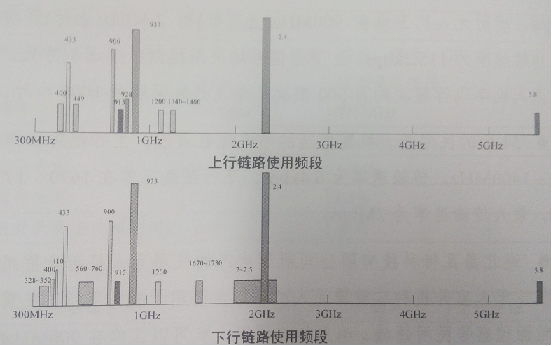
无人机概述及系统组成,无人机系统的构成
无人机的定义 无人驾驶航空器,是一架由遥控站管理(包括远程操纵或自主飞行)的航空器,也称遥控驾驶航空器,以下简称无人机。 无人机系统的定义
无人机系统,也称无人驾驶航空器系统,是指一架无人…
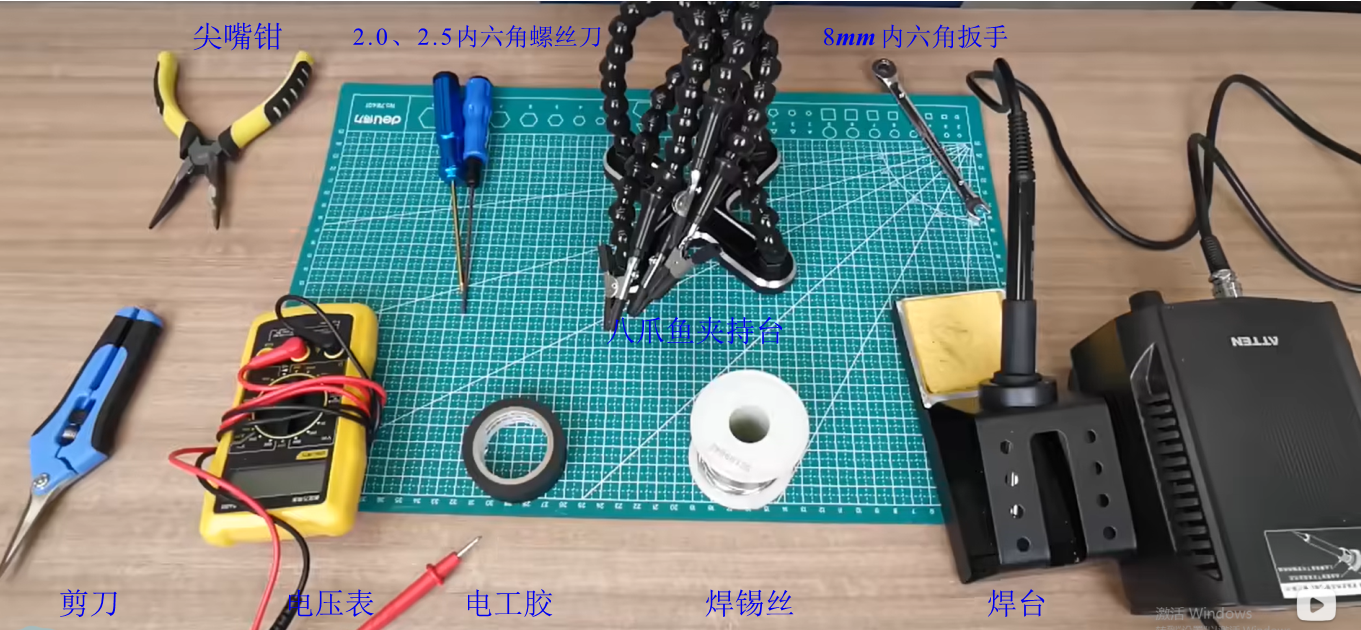
动手做个无人机—材料篇
基于浙江大学Fast-Lab(高飞,潘能)和深蓝学院合作课程:第二课:动力套焊接_哔哩哔哩_bilibili 无人机材料1: 1、NUC 猛虎峡谷 准系统 i5薄款: 一款机载电脑,使用i5-1135G7 ,最大内存64Gÿ…


基于材料生成算法的无人机航迹规划-附代码
基于材料生成算法的无人机航迹规划 文章目录 基于材料生成算法的无人机航迹规划1.材料生成搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用材料生成算法来优化无人机航迹规划。 …
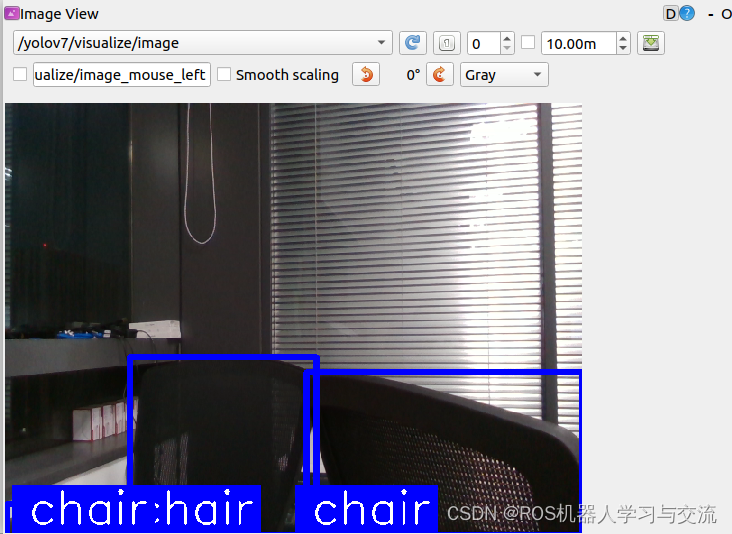
超维空间S2无人机使用说明书——32、使用yolov7进行目标识别
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov7进行物体识别,同时系统兼容了低版本的yolo,包括基于C的yolov3和yolov4,也有更高版本的yolov8。
简介,为了提高识别速度,系…
无人机集群反制与对抗技术探讨
源自:指挥与控制学报
作者:任 智 张 栋 唐 硕 王孟阳 李智军
“人工智能技术与咨询” 发布
摘要
无人机集群系统是现代信息化战争体系对抗中重要的新质作战力量, 是未来网络化、智能化作战的关键发展方向. 随着无人集群系统装备实战化技术的突…
植保无人机在作业过程中如何保证安全性?
植保无人机在作业过程中需要保证安全性,以避免发生意外事故。以下是一些保障植保无人机安全性的措施:
作业前检查:在作业前对植保无人机进行全面检查,包括机身、部件、电池、喷洒系统等,确保无人机处于良好状态&#…

(2)(2.14) SPL Satellite Telemetry
文章目录
前言
1 本地 Wi-Fi(费用:30 美元以上,范围:室内)
2 蜂窝电话(费用:100 美元以上,范围:蜂窝电话覆盖区域)
3 手机卫星(费用ÿ…
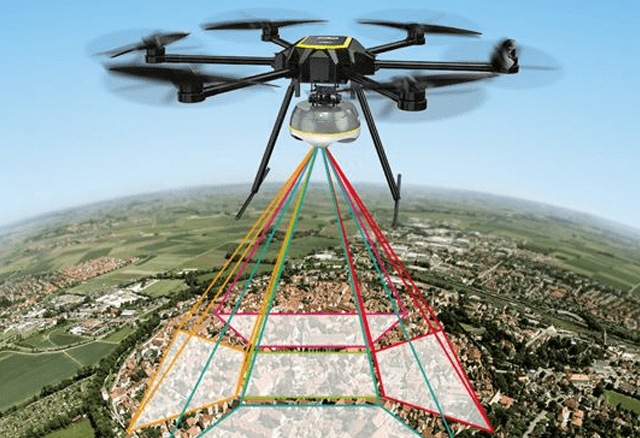
无人机倾斜摄影技术在智慧城市中的应用
随着智慧城市的不断发展和完善,新兴热门技术也不断崛起。无人机技术作为其中之一,具有操作简单、应用灵活等优势,受到了各个行业的青睐。现阶段,无人机技术与5G移动通信系统、人工智能系统深度融合,实现了无人机技术的…

(2)(2.1) Andruav Android Cellular(一)
文章目录
前言
1 Andruav 是什么?
2 Andruav入门
3 Andruav FPV
4 Andruav GCS App 前言
Andruav 是一个基于安卓的互联系统,它将安卓手机作为公司计算机,为你的无人机和遥控车增添先进功能。 1 Andruav 是什么ÿ…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现原理…
无人机数据链技术,无人机数据链路系统技术详解,无人机数传技术
早期的无人机更多的为军事应用服务,如军事任务侦查等,随着技术和社会的发展,工业级无人机和民用无人机得到快速的发展,工业级无人机用于农业植保、地理测绘、电力巡检、救灾援助等;民用无人机用于航拍、物流等等领域。…
Webots实现大疆Mavic2pro无人机定点飞行
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、将无人机当成一个对象1.1定义无人机相关属性1.2定义用于控制无人机运动的代码1.3主函数实现无人机的点位固定和飞行检测 二、用键盘控制测试代码三、效果展…
无人机激光雷达标定板
机载激光雷达标定板是用于校准和验证机载激光雷达系统的设备。由于机载激光雷达系统在测量地形、建筑物和植被等方面具有广泛的应用,因此标定板的使用对于确保测量结果的准确性和可靠性至关重要。 标定板通常由高反射率的材料制成,如镀金的玻璃或陶瓷&am…

加固平板电脑在无人机的应用|亿道三防onerugged
无人机技术的快速发展已经在许多领域展现出巨大潜力,而加固平板电脑的应用在无人机领域中扮演着重要角色。
首先,加固平板电脑在无人机探测设备中发挥着关键作用。无人机探测设备通常需要实时传输高清图像和数据,以支持各种监测、勘测和检测…

负重20kg复合翼垂直起降无人机应用,复合翼无人机技术分析
主要任务应用
1.管线巡查
挂载可见光/红外二合一光电载荷和小型SAR设备,对既定线路进行昼夜巡视侦察,利用图像实时传回指挥控制中心,可用于石油管路、电力线路、舰艇航线及周围态势感知,利于依据现场实情进行战略决策和指令传达…
六轴陀螺仪在游戏手柄中的应用及中国市场展望
随着电子竞技的兴起和虚拟现实技术的发展,游戏手柄作为重要的交互设备,其性能和功能日益受到重视。六轴陀螺仪作为一种高精度的运动传感器,其在游戏手柄中的应用,不仅提升了用户的游戏体验,也为游戏手柄市场带来了新的…
组装无人机需要哪些工具?
组装无人机需要以下工具:
螺丝刀:用于固定无人机各个部件的螺丝。扳手:用于固定无人机各个部件的螺丝。钳子:用于剪断线缆或夹持小型部件。剪刀:用于剪断线缆或夹持小型部件。螺丝起子:用于组装无人机各个…

(1)(1.13) SiK无线电高级配置(五)
文章目录
前言
10 可用频率范围
11 DUTY_CYCLE 设置
12 低延迟模式
13 先听后说 (LBT)
14 升级无线电固件
15 MAVLink协议说明 前言 本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 1…

中国农业无人机行业市场现状分析与投资前景预测研究报告
全版价格:壹捌零零
报告版本:下单后会更新至最新版本
交货时间:1-2天
第一章农业无人机行业发展综述
第一节农业无人机行业定义及分类
一、农业无人机行业的定义
农业无人机是一种无人驾驶的飞行器来帮助优化农业经营,增加作…

2024第八届全国青少年无人机大赛暨中国航空航天科普展览会
2024第八届全国青少年无人机大赛暨中国航空航天科普展览会
邀请函
主办单位:
中国航空学会
重庆市南岸区人民政府
招商执行单位:
重庆港华展览有限公司
为更好的培养空航天产业人才,汇聚航空教育产业创新科技,丰富和完善航…

【NTN 卫星通信】卫星和无人机配合的应用场景
1 场景概述 卫星接入网是一种有潜力的技术,可以为地面覆盖差地区的用户提供无处不在的网络服务。然而,卫星覆盖范围对于位于考古或采矿地点内部/被茂密森林覆盖的村庄/山谷/靠近山丘或大型建筑物的用户可能很稀疏。因此,涉及卫星接入和无人驾…
路径优化算法 | 基于A_Star算法实现复杂地形下无人机威胁概率地图最短路径避障三维航迹规划
概述
A* (A-Star) 算法是一种广泛使用的路径搜索和图形遍历算法,用于在给定起点和终点的情况下找到最短路径。对于无人机在复杂地形下的三维航迹规划,A* 算法可以与其他技术结合,例如威胁概率地图(Threat Probability Map),以实现避障和最短路径规划。
以下是一个基于 …
【故事】无人机学习之旅
今天是清明假期最后一天,晚上在看无人机的东西,翻到了欣飞鸽的知乎主页,读了他的一些文章。虽不曾相识,但感觉我们有很多相似的经历,也想记录一下自己的无人机学习之旅。
青铜:从使用开源飞控开始
我在大…
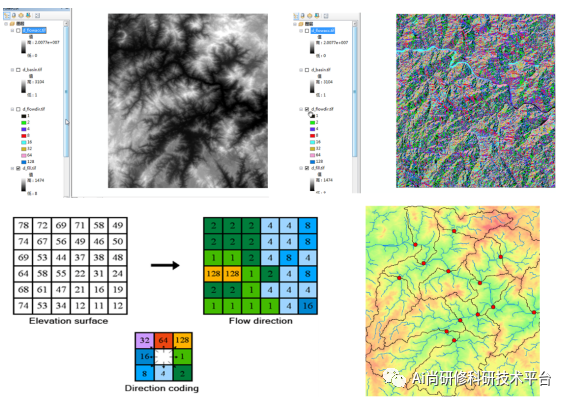
无人机生态环境监测、图像处理与GIS数据分析
构建“天空地”一体化监测体系是新形势下生态、环境、水文、农业、林业、气象等资源环境领域的重大需求,无人机生态环境监测在一体化监测体系中扮演着极其重要的角色。通过无人机航空遥感技术可以实现对地表空间要素的立体观测,获取丰富多样的地理空间数…
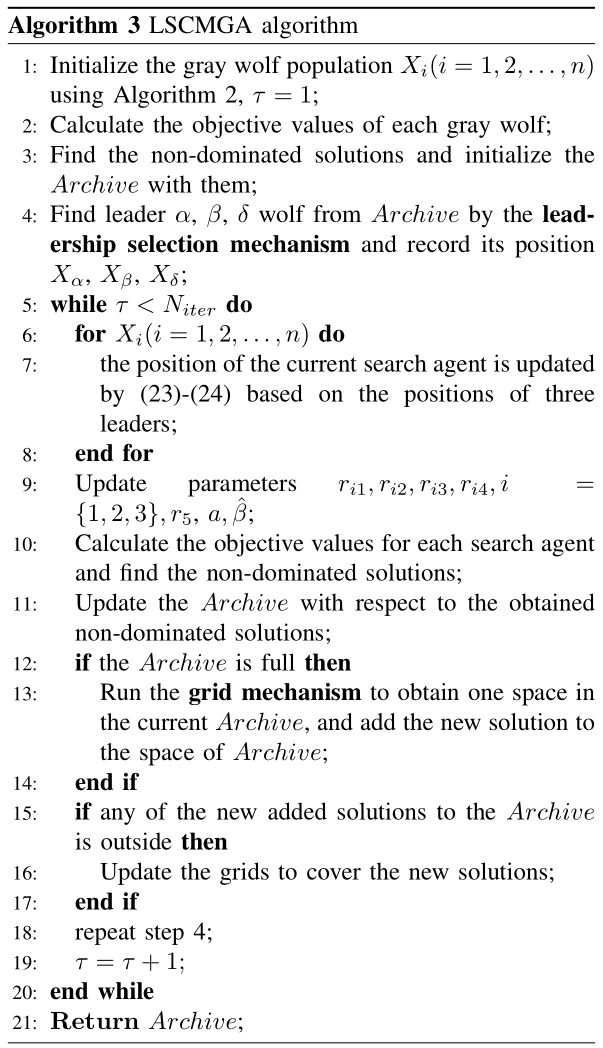
论文研读_多目标部署优化:无人机在能源高效无线覆盖中的应用(ImMOGWO)精简版
此篇文章为Multi-objective Deployment Optimization of UAVs for Energy-Efficient Wireless Coverage的论文学习笔记,只供学习使用,不作商业用途,侵权删除。并且本人学术功底有限如果有思路不正确的地方欢迎批评指正!
创新点
RD算法
混合…
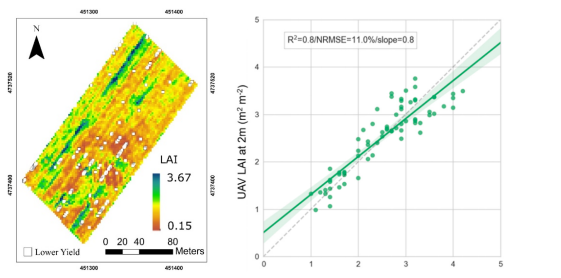
近地面无人机植被定量遥感与生理参数反演技术应用
李老师(副教授),长期从事无人机近地面植被遥感,植被生理参数,多角度遥感,RGB/多光谱/高光谱数据处理,LiDAR点云处理等领域研究工作,具有资深的技术底蕴和专业背景。
专题一、近十年…
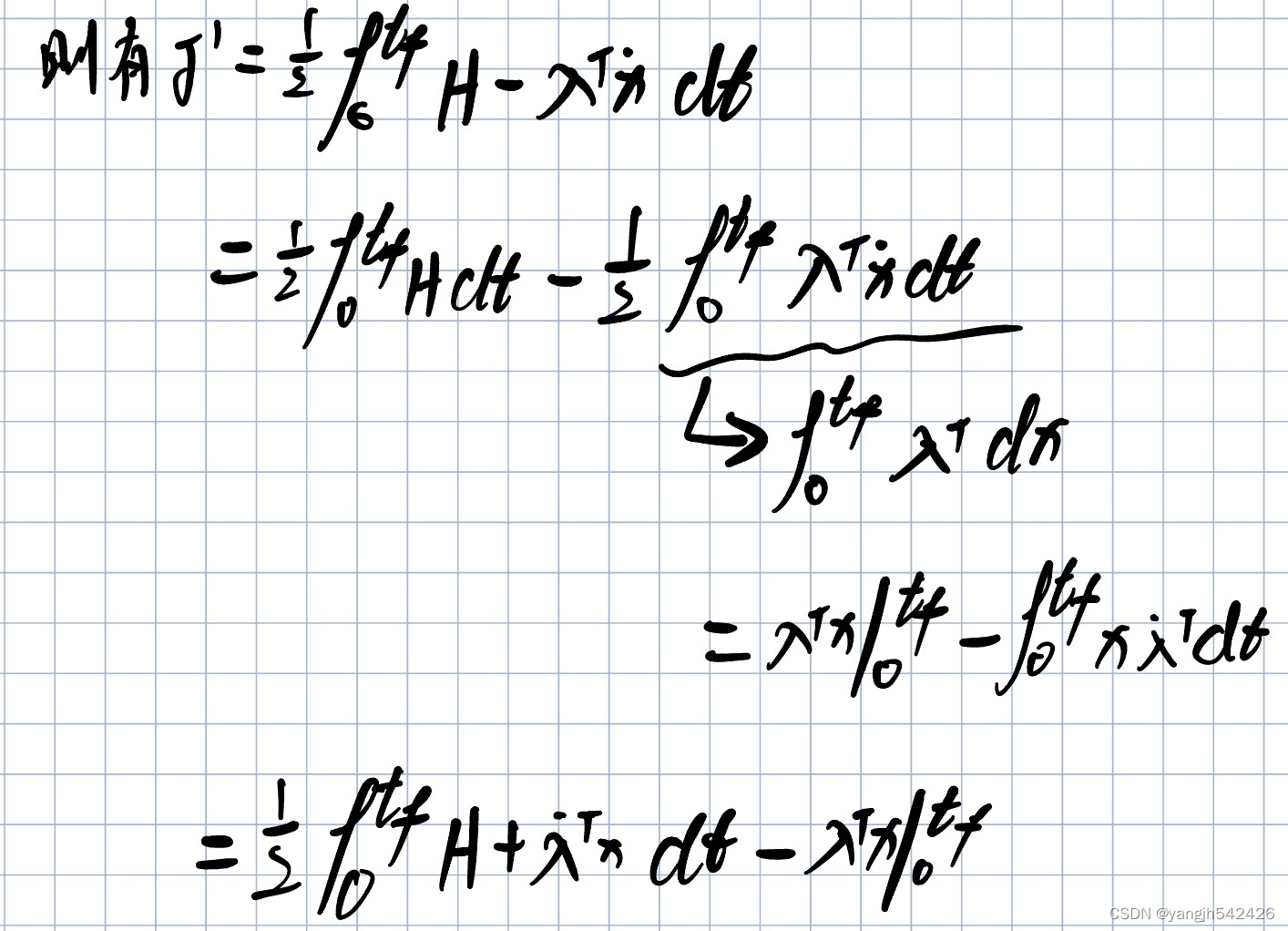
无人机|LQR控制算法及其无人机控制中的应用仿真
前言
LQR全称Linear Quadratic Regulator(线性二次调节器),顾名思义用于解决形如 x ˙ A x B u y C x D u \begin{aligned}\dot{x}&AxBu\\y&CxDu\end{aligned} x˙yAxBuCxDu 线性时不变系统的一种线性控制方法,…
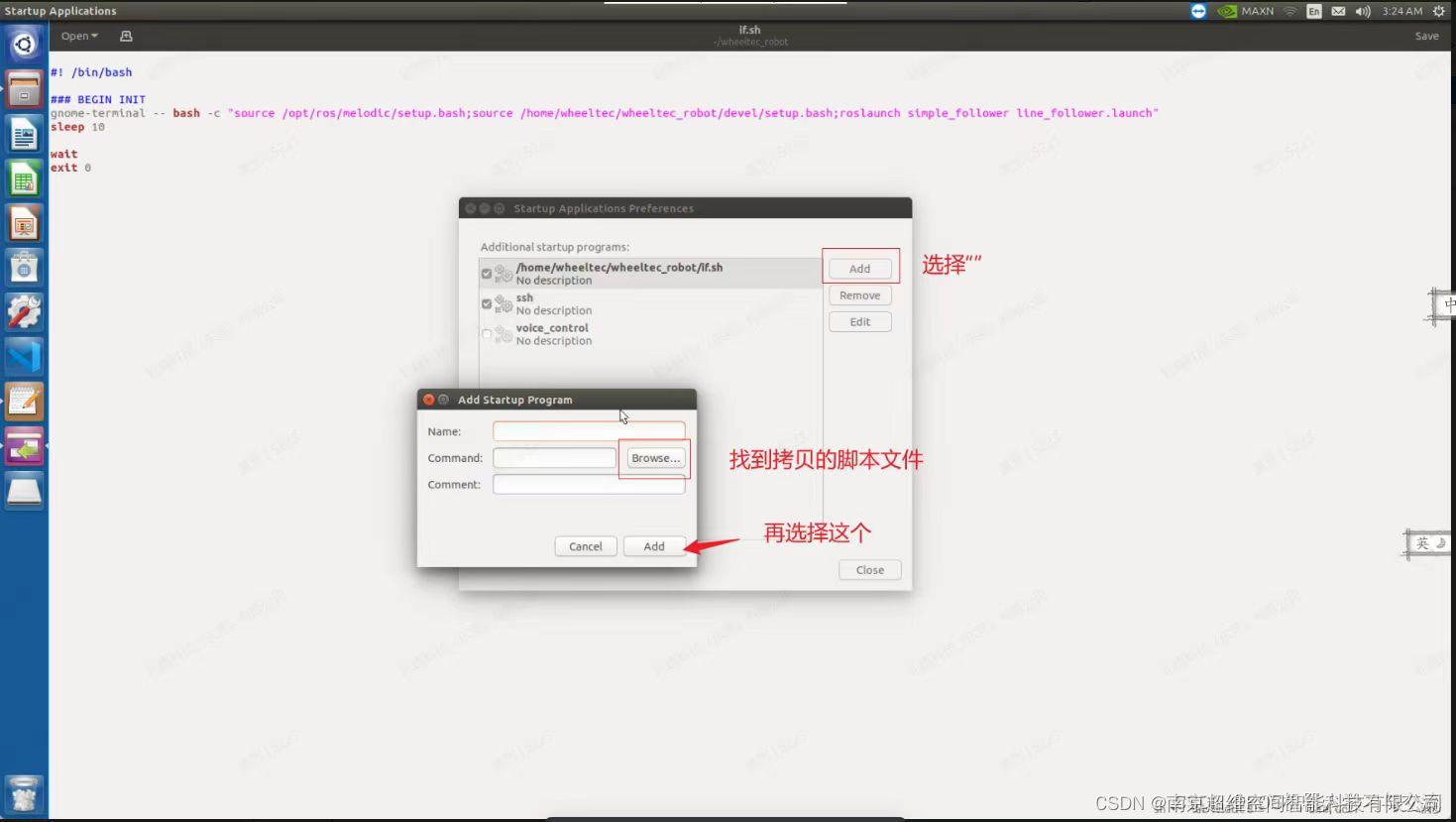
Jetson orin nano 8G设置ROS下launch文件开机自启动脚本文件
一、新建xxx.sh文件,将以下文件复制,需要根据自己的工作空间修改
###gmapping with abot###
gnome-terminal --window -e bash -c "source ~/cwkj_ws/devel/setup.bash;roslaunch robot_bringup px4.launch; exec bash" \
--tab -e bash -c &…

0基础学习VR全景平台篇第138篇:无人机航拍实操
上课!全体起立~
大家好,欢迎观看蛙色官方系列全景摄影课程!
为了使全景的概念体现得更为广阔和大气,我们也需要在天空上运用无人机进行全景拍摄,而无人机的拍摄相对于地面来说也是较为简单,掌握其基本的拍…
无人机竞赛视觉算法开发流程开源计划(询问大家意见)
本科中参加过一系列的无人机机器人竞赛,像电赛、工训赛、机器人大赛这些,有一些比较常用的方案打算开源一下。现在读研了,也算是对本科的一个总结,但是还是想看看大家意见,大家有什么需求可以在评论区说,我…

无人机编队 | 基于自适应航迹评价函数权重的动态窗口法长机-僚机法实现多无人机路径规划附matlab代码
基本概述
实现基于自适应航迹评价函数权重的动态窗口法(Dynamic Window Approach, DWA)的长机-僚机(Leader-Follower)多无人机路径规划是一个复杂的任务,涉及到多个算法的组合与改进。这里我会简要介绍其原理,并提供一个基础的Matlab代码框架,但请注意,这只是一个起点…

光伏无人机:绿色能源与航空技术的融合创新
在可再生能源和无人机技术快速发展的背景下,光伏无人机作为一种新兴的绿色航空器,正逐渐展现出其独特的优势和广阔的应用前景。本文将深入探讨光伏无人机的原理、优势以及其在多个领域的应用,展望其未来的发展趋势。 一、光伏无人机的原理
光…

【PX4学习笔记】13.飞行安全与炸机处理
目录 文章目录 目录使用QGC地面站的安全设置、安全绳安全参数在具体参数中的体现安全绳 无人机炸机处理A:无人机异常时控操作B:无人机炸机现场处理C:无人机炸机后期维护和数据处理D:无人机再次正常飞行测试 无人机飞行法律宣传 使…

PX4FMU和PX4IO最底层启动过程分析(下)
PX4FMU和PX4IO最底层启动过程分析(下)
PX4FMU的系统启动函数为nash_main(int argc,char *argv[]) PX4IO的系统启动函数为nash_start(int argc,char *argv[])
PX4FMU启动函数nash_main(int argc,char *argv[])
首先分析一下nash_main(int argc,char *a…
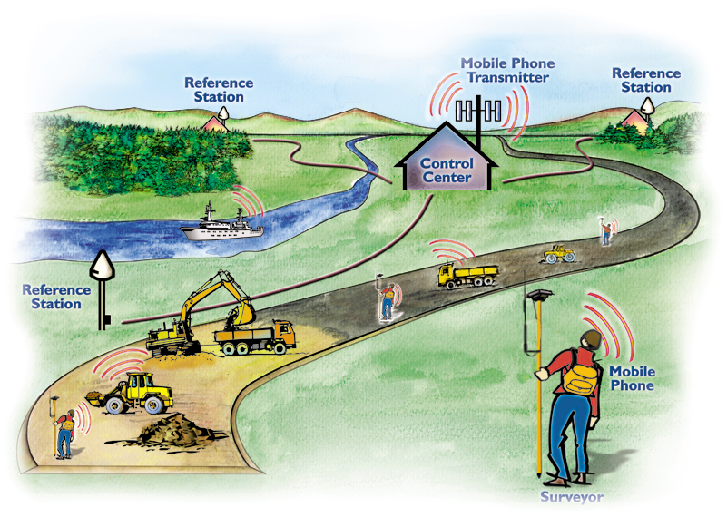
无人机精准定位技术,GPS差分技术基础,RTK原理技术详解
差分GPS的基本原理
差分GPS(Differential GPS,简称DGPS)的基本原理是利用一个或多个已知精确坐标的基准站,与用户(移动站)同时接收相同的GPS卫星信号。由于GPS定位时会受到诸如卫星星历误差、卫星钟差、大…
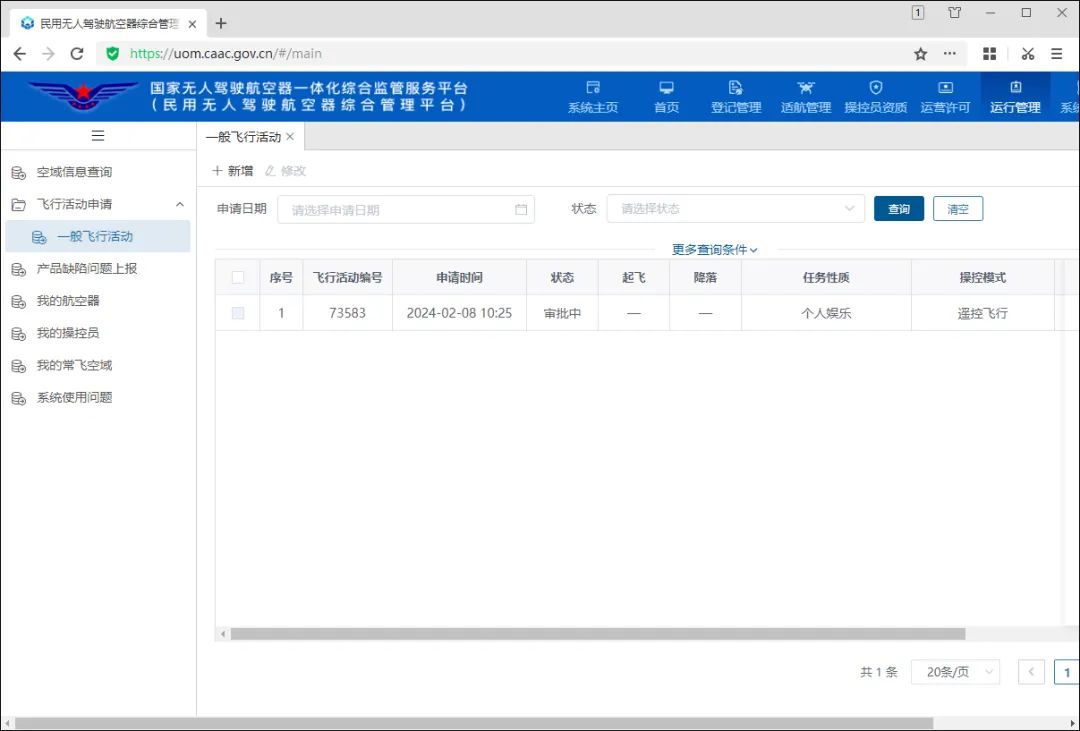
个人玩航拍,如何申请无人机空域?
我们在《年会不能停》一文中,有分享我们在西岭雪山用无人机拍摄的照片和视频,有兴趣可以去回顾。
春节的时候,趁着回老家一趟,又将无人机带了回去,计划拍一下老家的风景。
原本以为穷乡僻壤的地方可以随便飞…
基于单片机负载控制的无人机电气设备监测系统设计
摘要:为深入分析无人机电气设备的电子负载性能,实现对传输电子量的合理性监管与控制,设计基于单片机负载控制的无人机电气设备监测系统;利用电气信号发生电路,构建负载网络控制器与以太网模块运行所需的电气设备负载环境,借助PCB监控板建立PLC扩展负载模块与核心监控主机…

(3)(3.1) FlightDeck FrSky发射器应用程序
文章目录
前言
1 概述
2 Turnkey Packages
3 参数说明 前言
Craft and Theory 的 FlightDeck 可让你轻松查看飞行模式、高度、速度、姿态和关键系统警报,包括故障保护和电池错误,如电池不平衡警告和发射机低电量警报。 1 概述 Craft and Theory 的…

无人机镜头稳定的原理和相关算法
无人机的镜头稳定主要基于两个关键技术:镜头平衡技术和实时电子稳像。无人机镜头稳定的原理和相关算法主要是通过镜头平衡技术和实时电子稳像技术来保持摄像镜头的稳定性,从而拍摄出清晰、稳定的画面。无人机镜头稳定的原理主要是通过传感器和算法来实现…

四川无人机测绘 无人机测量 无人机航测服务
目前,无人机测绘已经成为土地测量、建筑等行业的重要组成部分,它是以低成本和现场时间获得准确数据的有效应用。那么无人机测绘有哪些优势呢?
1、高效性
和传统测绘方法相比,无人机测绘具有高效性。传统测绘方法通常需要人员手持…
从SPI协议学习PX4源码
一、SPI类
SPI类的参数:设备名称,devname设备节点名称,总线,device片选信号线,SPI模式,时钟频率,中断。SPI类继承VDev类。 SPI协议在spi.cpp文件中,涉及到了cdev和device的操作。c…

反无人机电子护栏:原理、算法及简单实现
随着无人机技术的快速发展,其在航拍、农业、物流等领域的应用日益广泛。然而,无人机的不规范使用也带来了安全隐患,如侵犯隐私、干扰航空秩序等。为了有效管理无人机,反无人机电子护栏技术应运而生。
目录
一、反无人机电子护栏…

无人机手持地面站软件功能详解,无人机手持地面站软件开发人员组成及成本分析
无人机手持地面站软件是专为无人机操控和任务管理设计的移动应用,它通常集成在智能手机、平板电脑或其他便携式设备上,使得用户可以在远离无人机的地方对飞行器进行实时监控与远程控制。 主要功能详解:
1. 飞行控制与姿态显示:
…
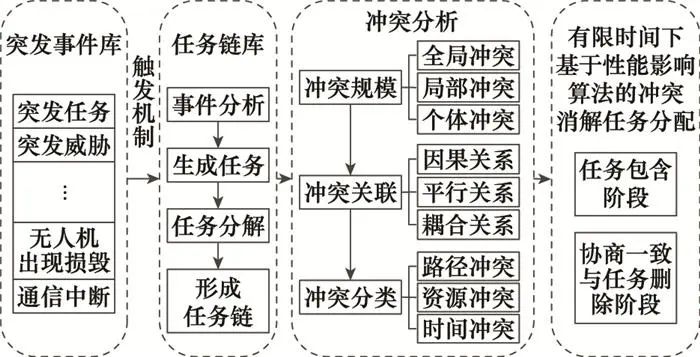
无人机集群任务分配技术研究综述
源自:系统工程与电子技术
作者:毕文豪 张梦琦 高飞 杨咪 张安
“人工智能技术与咨询” 发布
摘 要
任务分配是无人机集群实现高效遂行作战任务的关键技术。随着无人机集群技术的发展和作战样式的转变, 无人机集群的作战任务领域不断拓展, 任务分…
【无人机综合题】+题解
在没有遮挡的山地、水面、沙漠,那个对遥控的距离影响最大??(水面,因为飞机在一大片水体上飞行会产生下沉效应坐飞机限制携带的电池容量是多少?坐飞机限制携带的电池容量是160Wh.多旋翼机由几个部分组成?分】多旋翼机由机架、电调、电机、电池&#x…
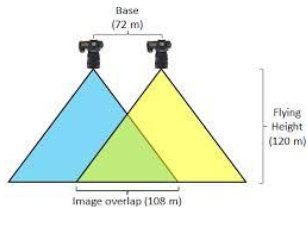
无人机采集图像的相关知识
1.飞行任务规划 一般使用飞行任务规划软件进行飞行任务的设计,软件可以自动计算相机覆盖和图像重叠情况。比如ArduPilot (ArduPilot - Versatile, Trusted, Open) 和UgCS (http://www.ugcs.com)是两个飞行任务规划软件,可以适用大多数无人机系统。
2.图…
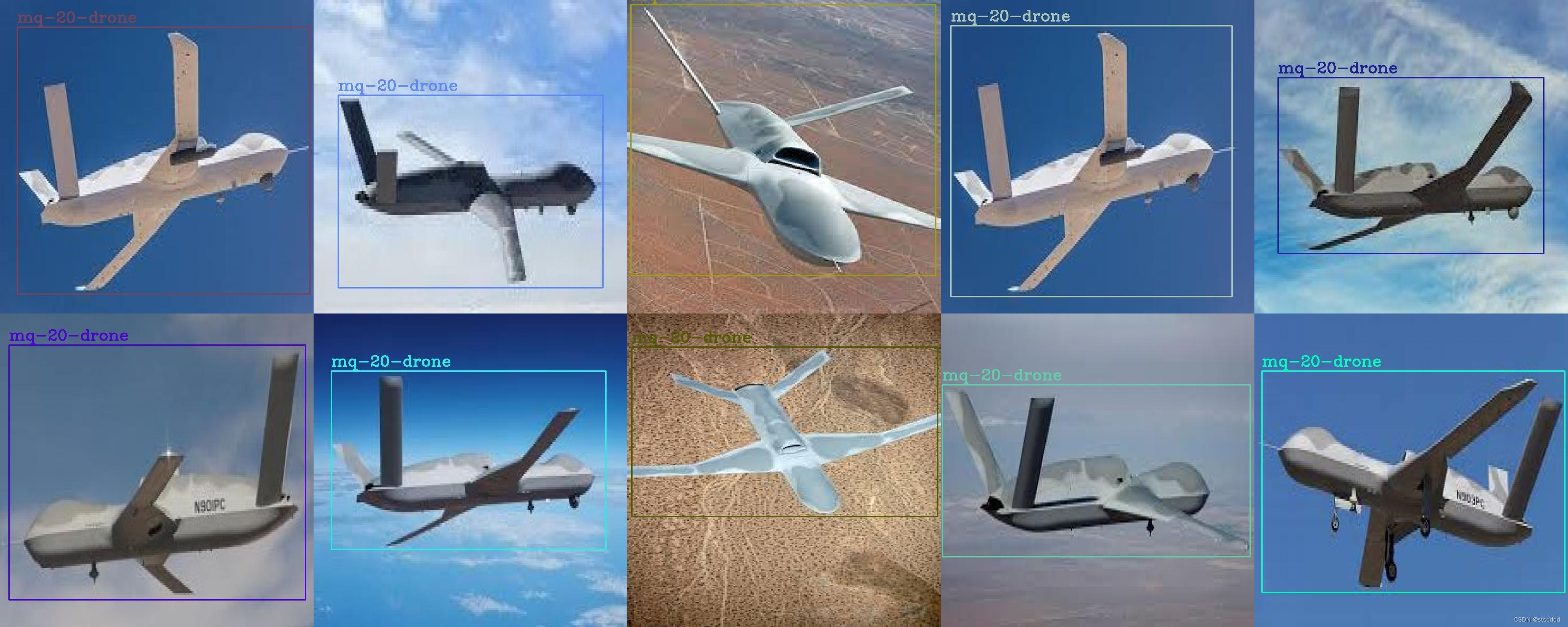
【 yolo红外微小无人机-直升机-飞机-飞鸟目标检测】
yolo无人机-直升机-飞机-飞鸟目标检测 1. 小型旋翼无人机目标检测2. yolo红外微小无人机-直升机-飞机-飞鸟目标检测3. yolo细分类型飞机-鸟类-无人机检测4. yolo红外大尺度无人机检测5. 小型固定翼无人机检测6. 大型固定翼无人机检测7. yolo航空俯视场景下机场飞机检测 1. 小型…

机器人路径规划:基于双向A*算法(bidirectional a star)的机器人路径规划(提供Python代码)
一、双向A*算法简介
传统A*算法是一种静态路网中求解最短路径最有效的方法, 它结合了BFS 算法和迪杰斯特拉算法(Dijkstra)的优点。 和迪杰斯特拉算法(Dijkstra)一样, A*算法能够用于 搜索最短路径; 和BFS 算法一样, A*算法可以用…
无人机飞行控制、导航和路径规划的原理、技术和相关算法
无人机飞行控制、导航和路径规划是无人机技术的核心组成部分,其原理和技术涉及多个学科领域。这些技术和算法的不断发展和优化,为无人机的应用和发展提供更强有力的支持。下面解释它们的原理、技术和相关算法。 飞行控制: 无人机飞行控制的基…
无人机群全局一致性后端优化
视觉全局一致性
目的:不同无人机看到同一个路标点时,可以构建重投影误差来优化位姿 重点学习参考vins前端图像跟踪
双目模式vins
VIO 入口为rosNodeTest.cpp,首先利用sync_process()中先读取配置文件,再调用estimator.inputIma…
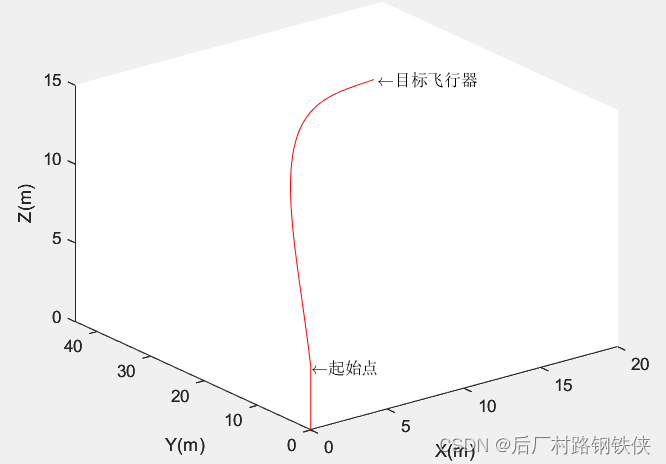
基于Rflysim平台的无人机拦截三维比例导引算法仿真
【后厂村路钢铁侠出品】
一、Rflysim简介
RflySim是一套专为科研和教育打造的Pixhawk /PX4 和MATLAB/Simulink生态系统或工具链,采用基于模型设计(Model-Based Design, MBD)的思想,可用于无人系统的控制和安全测试。…

LabVIEW无人机大气数据智能测试系统
LabVIEW无人机大气数据智能测试系统
随着无人机技术的迅速发展,大气数据计算机作为重要的机载设备,在确保飞行安全性方面发挥着重要作用。设计了一套基于LabVIEW的无人机大气数据智能测试系统,通过高效、稳定的性能测试,及时发现…
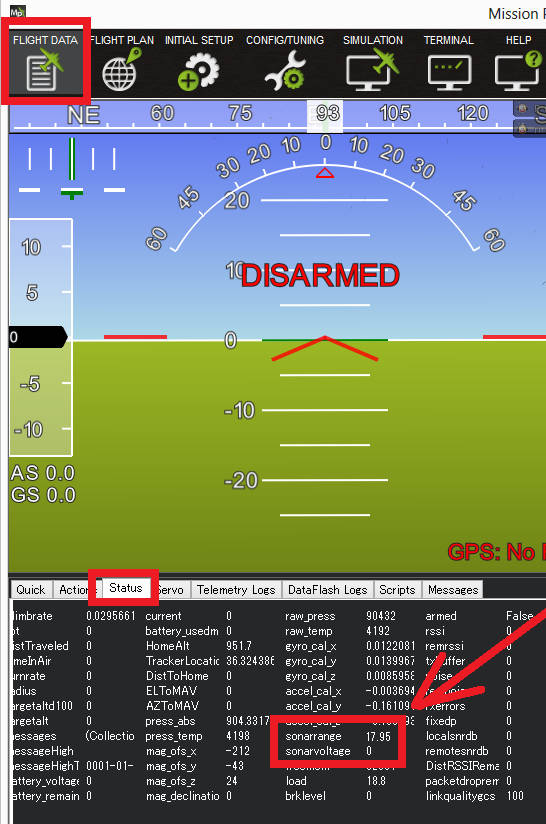
(4)(4.3) Kogger Sonar
文章目录
前言
1 推荐硬件
2 配置回声探测仪模块
3 连接ArduPilot硬件
4 参数说明 前言
KOGGER 声纳(KOGGER Sonar)是一款结构紧凑、成本低廉的水下回声测深仪模块,带有 UART 接口,电源电压为 5-14v。 1 推荐硬件 CP210x USB->UART 转换器和安装…
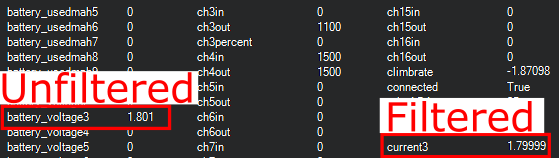
(16)燃油流量和液位传感器
文章目录 前言
16.1 燃油流量传感器
16.1.1 连接到自动驾驶仪
16.2 燃油液位传感器
16.2.1 PWM油位传感器
16.2.2 模拟油位传感器 前言
在 4.0 及以后的固件版本中,ArduPilot 提供了使用燃油流量和液位传感器的能力,此外还有电池监控器。支持脉冲输…
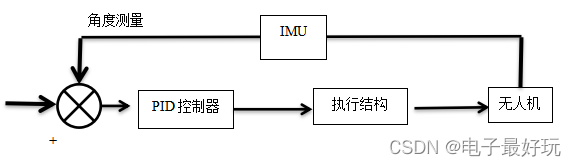
多旋翼无人机试验系统设计与实现
摘 要 世界的航空业的大门被20世纪莱特兄弟制造的“飞行者一号”开启,直至今日处于飞速发展的阶段。随着时代的进步,各种微电子、微传感、通信技术的飞速发展,让无人机在时代内成为一种新型的空中力量。除了军用方面的多种用途,无…
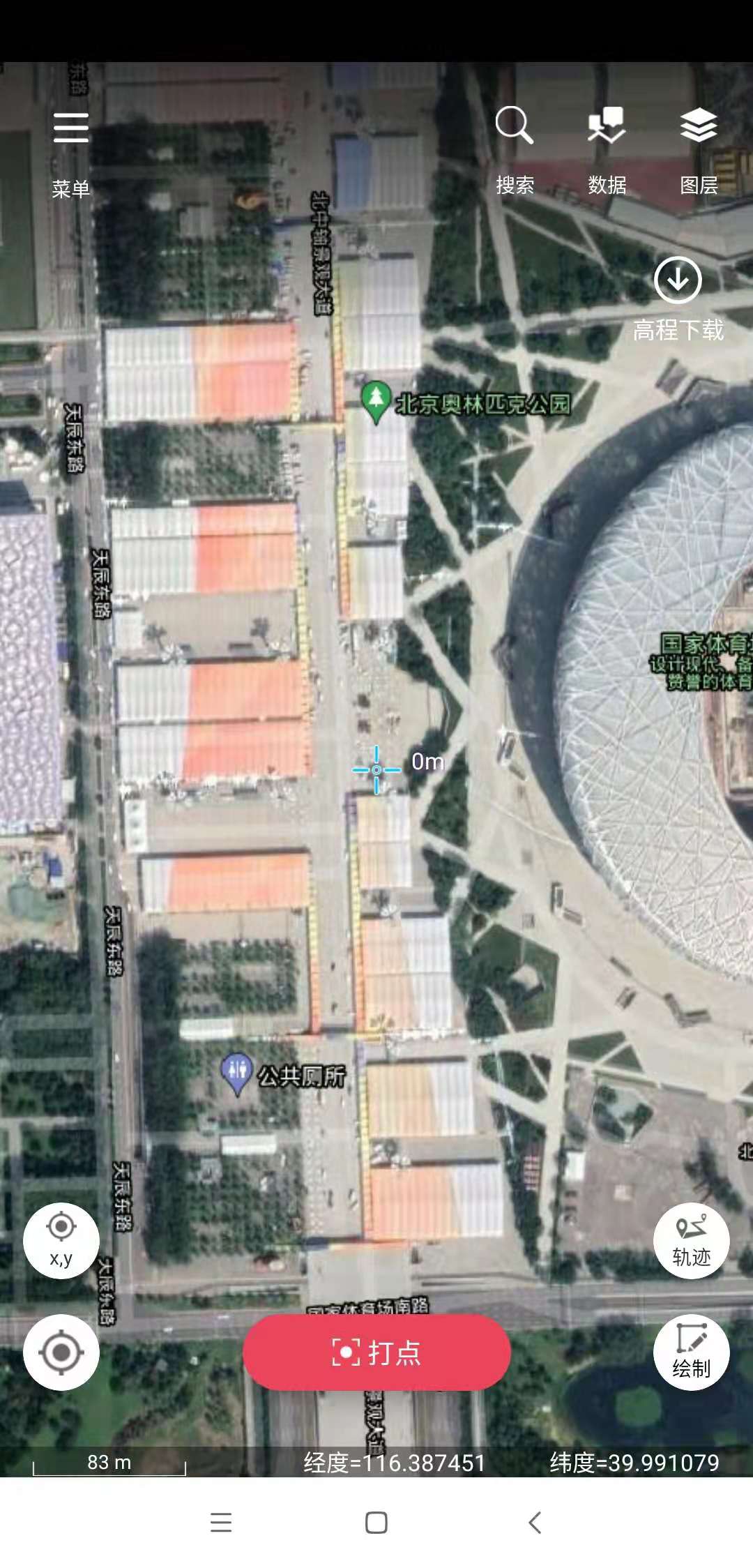
大体积mbtiles影像地图文件用什么软件浏览?
mbtiles格式简称mbt,是一种影像地图文件。PC端和手机端都有软件可以加载留着mbt格式的影像地图。
电脑桌面端
电脑端上的软件可以使用“图新地球”,直接把mbt文件拖到地图上即可,非常简便。 手机端
可以从华为应用商店下载“外业精灵”app…

(02)Cartographer源码无死角解析-(71) 2D后端优化→OptimizationProblem2D::Solve() - 优化准备工作,参数块
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
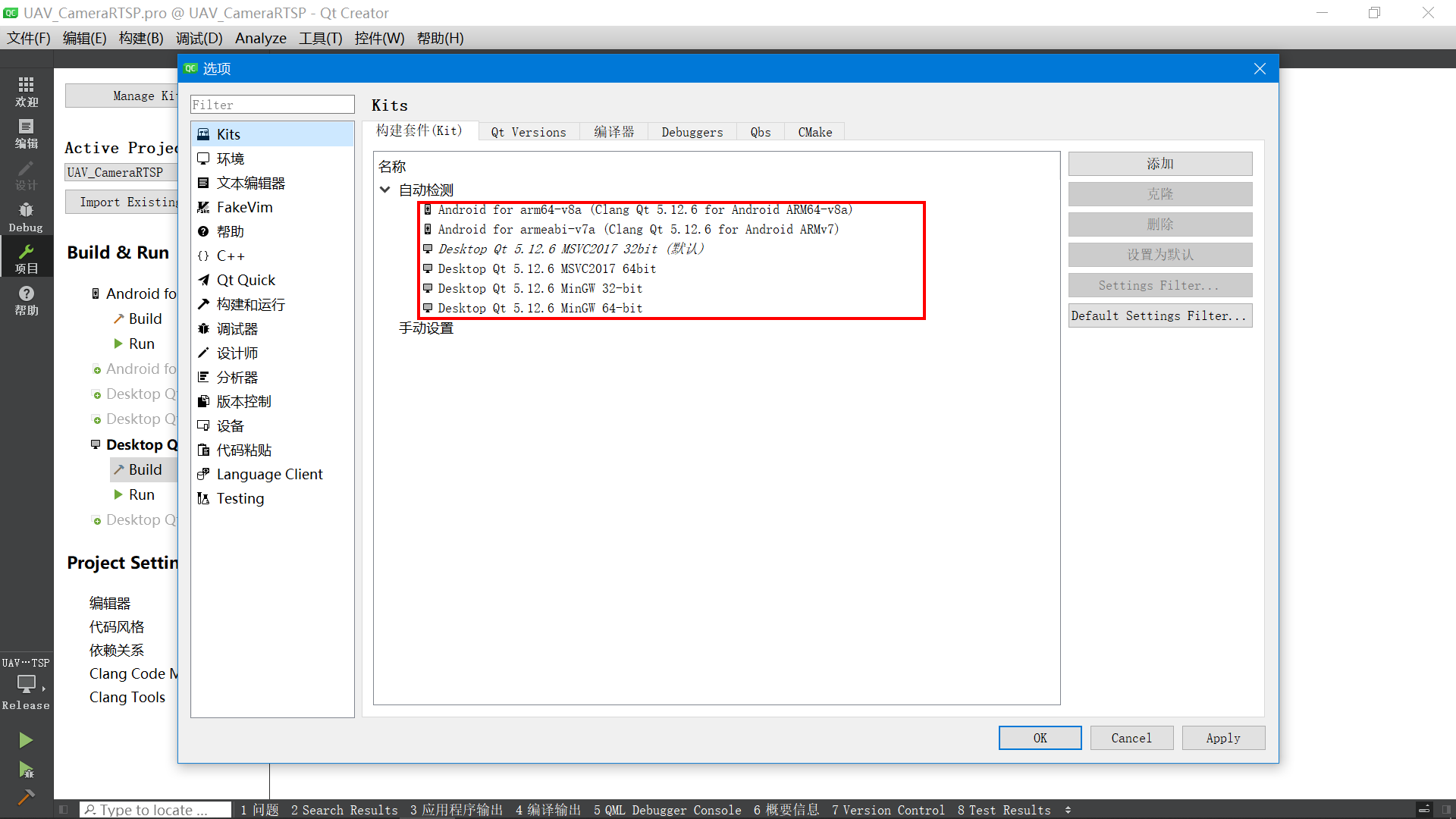
基于QT设计的无人机地面站(摄像头录像拍摄)
一、功能需求
通过QT设计一款无人机地面站软件,需要包含基本的RTSP拉流功能,对接无人机平台的RTSP流。此外,需要完成拍照、录像、OSD叠加功能;完成按钮控制云台进行拍照、录像、变焦、指点运动等。在此基础上,完成对应的目标跟踪识别。
技术要求 (1)采用QT平台,设计W…

商用无人机的飞行感知技术
导语:本文内容来自领航高科(LHUAS)研发部工程师周鹏跃在雷锋网硬创公开课的分享,由雷锋网旗下栏目“新智造”整理。编者按:本文内容来自领航高科(LHUAS)研发部工程师周鹏跃在雷锋网(公众号&…

消费类无人机图传系统设计中的一些关键
导语:本次公开课从技术的角度详细介绍了图传系统设计中的: 1 个核心问题,2 个设计红线,4 个基本设计参数,8 个设计重点,以及 1 个中肯的设计建议。自从大疆新品 Mavic 的关键特性之一:“7公里图…

无人机如何在低功耗前提下实现超远距离图传 | 硬创公开课
大疆Mavic 大疆新品Mavic的“7公里图传”让人睁大了眼,惊讶之余人们都对无人机远距离图传产生了兴趣,无人机想要做超远距离图传究竟需要什么样的技术呢?图传的距离和功耗在无人机上如何进行平衡?技术实现上有什么样的难度…

(02)Cartographer源码无死角解析-(75) 2D后端优化→整体复盘,理解后端优化核心思想
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
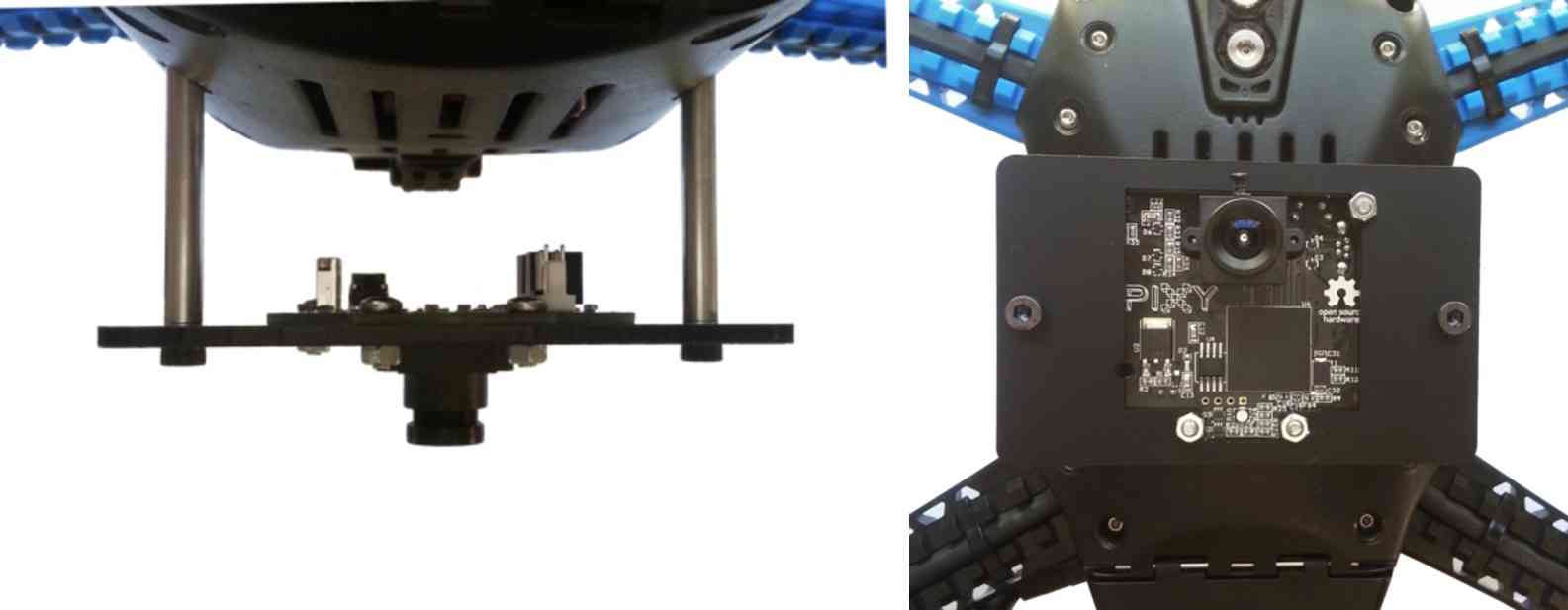
(30)精准降落和悬停(IRLock)
文章目录 30.1 概述
30.2 哪里可以买到
30.3 连接到自动驾驶仪
30.4 安装到框架上
30.5 通过任务规划器进行设置
30.6 飞行和测试 30.1 概述
Copter 支持使用 IR-LOCK 传感器(IR-LOCK sensor)和声纳或激光雷达(sonar or lidar)进行精确着陆。使用该系统,当飞行…

基础实验篇 | uORB消息读写与自定义实验(一)
导读
uORB是PX4/Pixhawk系统中非常重要且关键的模块之一,是用于无人机模块间通信的协议机制。本篇将详细介绍uORB并详细拆解uORB消息读写与自定义实验(一)。 基础实验篇 | uORB消息读写与自定义实验(一) ect Request Broker,微对…

实战实例 | 郑航无人驾驶航空器系统工程专业综合实验平台建设项目
郑州航空工业管理学院
无人驾驶航空器系统工程专业综合实验平台建设项目 关键词:飞控开发、仿真训练、组装调试、无人机集群
解决方案:多智能体协同创新实验室解决方案
| 项目背景
无人机行业是当前发展迅速、技术综合性强和应用前景好的朝阳行业。基…

赛事 | 第25届中国机器人及人工智能大赛全国决赛榜单发布
第25届中国机器人及人工智能大赛成功举办
2023年6月13日至14日,第二十五届中国机器人及人工智能大赛于海南科技职业大学成功举办。大赛由中国人工智能学会主办,共有来自清华大学、哈尔滨工业大学、中国科学技术大学、西安交通大学等500多所高校进入全国…

无人机航拍图像拼接与目标识别
一、简介 无人机用来做图像侦察是常见功能,现有技术基本是无人机对某片区域进行飞行,人工实时监控飞行图像,将图像录制成视频供事后回放。此方法对人员业务要求比较高、反应速度足够快、不利于信息收集、录制视频丢失空间信息、对于后期开展区…

(1)(1.9) HC-SR04声纳
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
HC-SR04 声纳是一种价格低廉但量程很短(最远只有 2m)的测距仪,主要设计用于室内,但也成功地在室外的 Copter 上使用过。极短的测距范围使其用途有限。 !Warning…

基于猫群算法的无人机航迹规划-附代码
基于猫群算法的无人机航迹规划 文章目录 基于猫群算法的无人机航迹规划1.猫群搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用猫群算法来优化无人机航迹规划。 1.猫群搜索算法
…
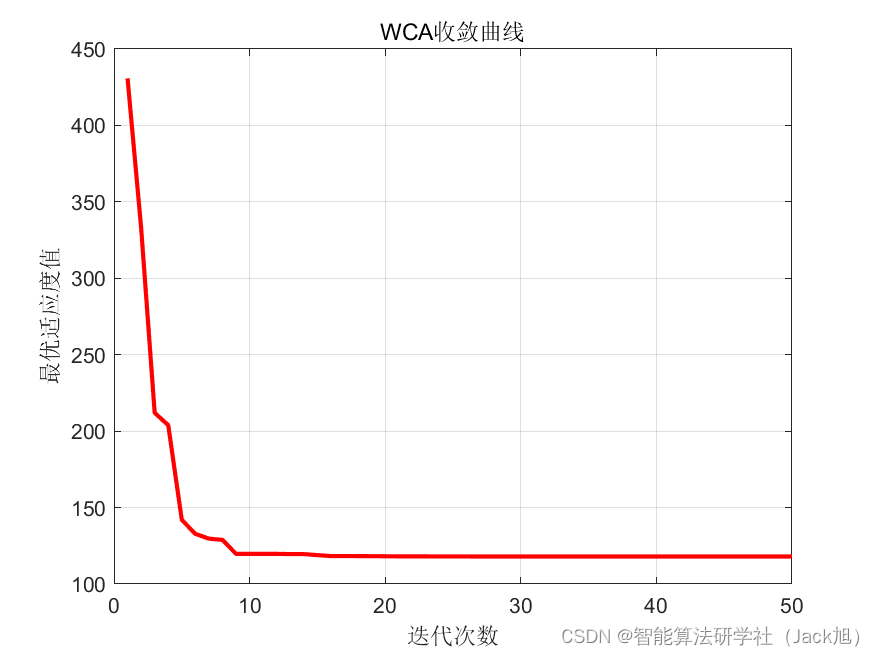
基于水循环算法的无人机航迹规划-附代码
基于水循环算法的无人机航迹规划 文章目录 基于水循环算法的无人机航迹规划1.水循环搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用水循环算法来优化无人机航迹规划。 1.水循环…

基于引力搜索算法的无人机航迹规划-附代码
基于引力搜索算法的无人机航迹规划 文章目录 基于引力搜索算法的无人机航迹规划1.引力搜索搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用引力搜索算法来优化无人机航迹规划。 …

基于回溯搜索算法的无人机航迹规划-附代码
基于回溯搜索算法的无人机航迹规划 文章目录 基于回溯搜索算法的无人机航迹规划1.回溯搜索搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用回溯搜索算法来优化无人机航迹规划。 …
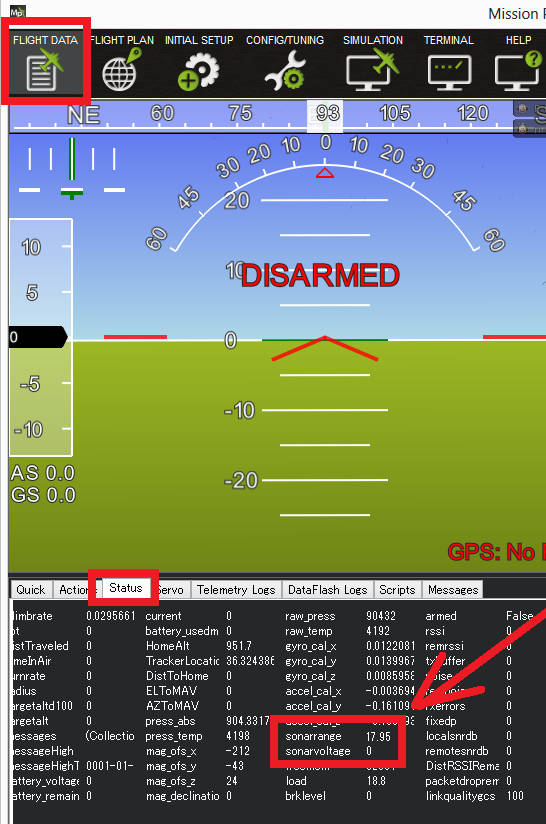
(1)(1.8) Hondex声纳
文章目录
前言
1 推荐的硬件
2 连接和配置
3 参数说明 前言
Hondex HE-8S 是一款回声测深仪(又称水下声纳),测深范围 100m,内置 GPS 和 NMEA 输出,可由 ArduPilot 使用。其他 Hondex 声纳也可以使用,但…

(1)(1.10) JSN-SR04T声纳
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
JSN-SR04T 是一种超声波距离传感器。有两个版本 v2.0 和 v3.0。v2.0 的作用范围为 25 至 450cm,v3.0 的作用范围为 20 至 600cm。也更稳定。由于量程很短,因此使用范围有限。 1 连接到自动驾驶仪 …

基于模拟退火算法的无人机航迹规划-附代码
基于模拟退火算法的无人机航迹规划 文章目录 基于模拟退火算法的无人机航迹规划1.模拟退火搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用模拟退火算法来优化无人机航迹规划。 …

基于蝗虫算法的无人机航迹规划-附代码
基于蝗虫算法的无人机航迹规划 文章目录 基于蝗虫算法的无人机航迹规划1.蝗虫搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用蝗虫算法来优化无人机航迹规划。 1.蝗虫搜索算法
…
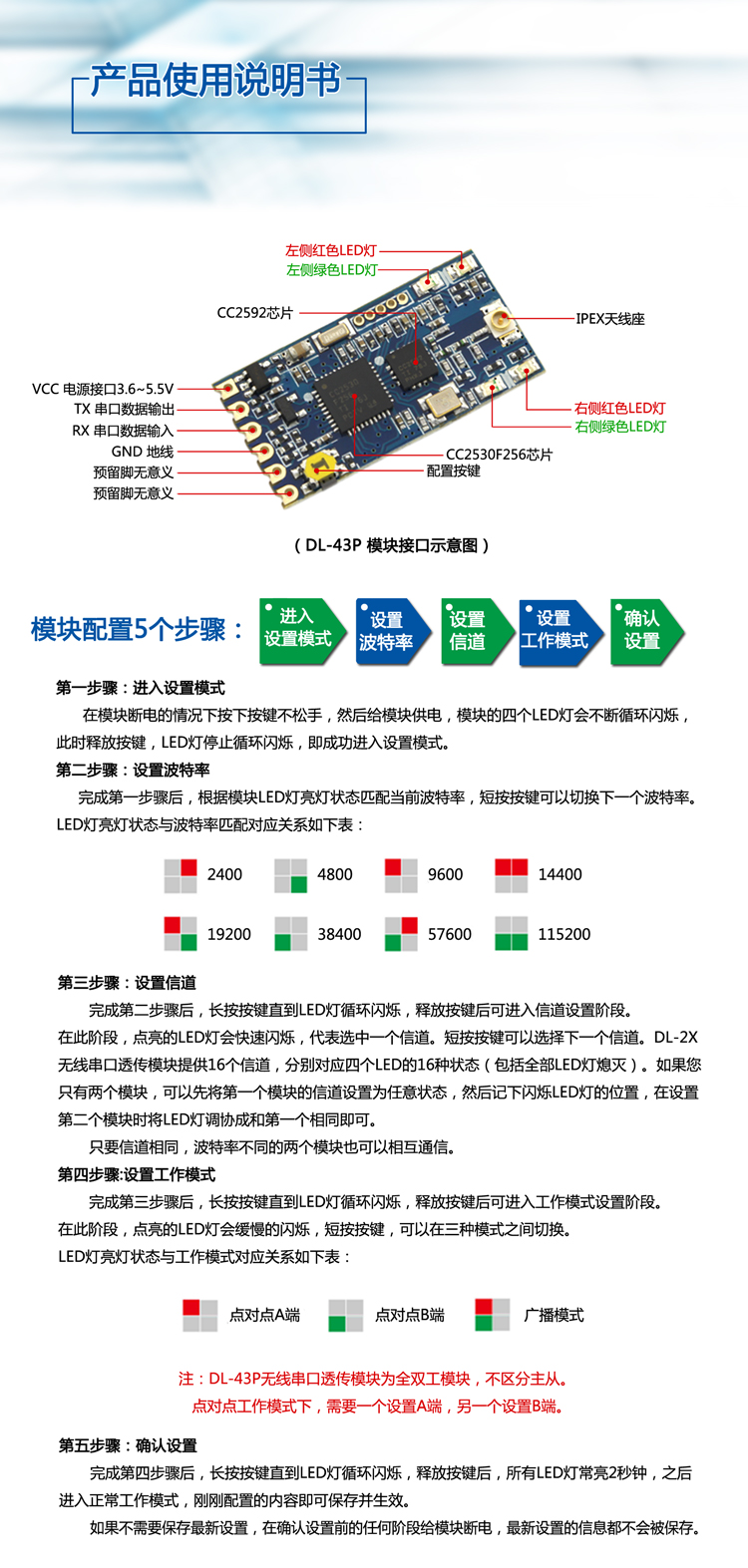
无人机编队通信网络搭建
文章目录 前言一、ESP8266 WIFI模块1.1电脑热点设置1.2esp8266设置 二、P9001.接线2.数传配置2.1旧版P900的配置方法2.2新版P900的配置方法 3.地面站配置4.常见问题 三、DL-43P 前言
ubuntu20.04
一、ESP8266 WIFI模块
使用的硬件是淘宝十块钱的ESP01s 首先需要给模块刷写P…
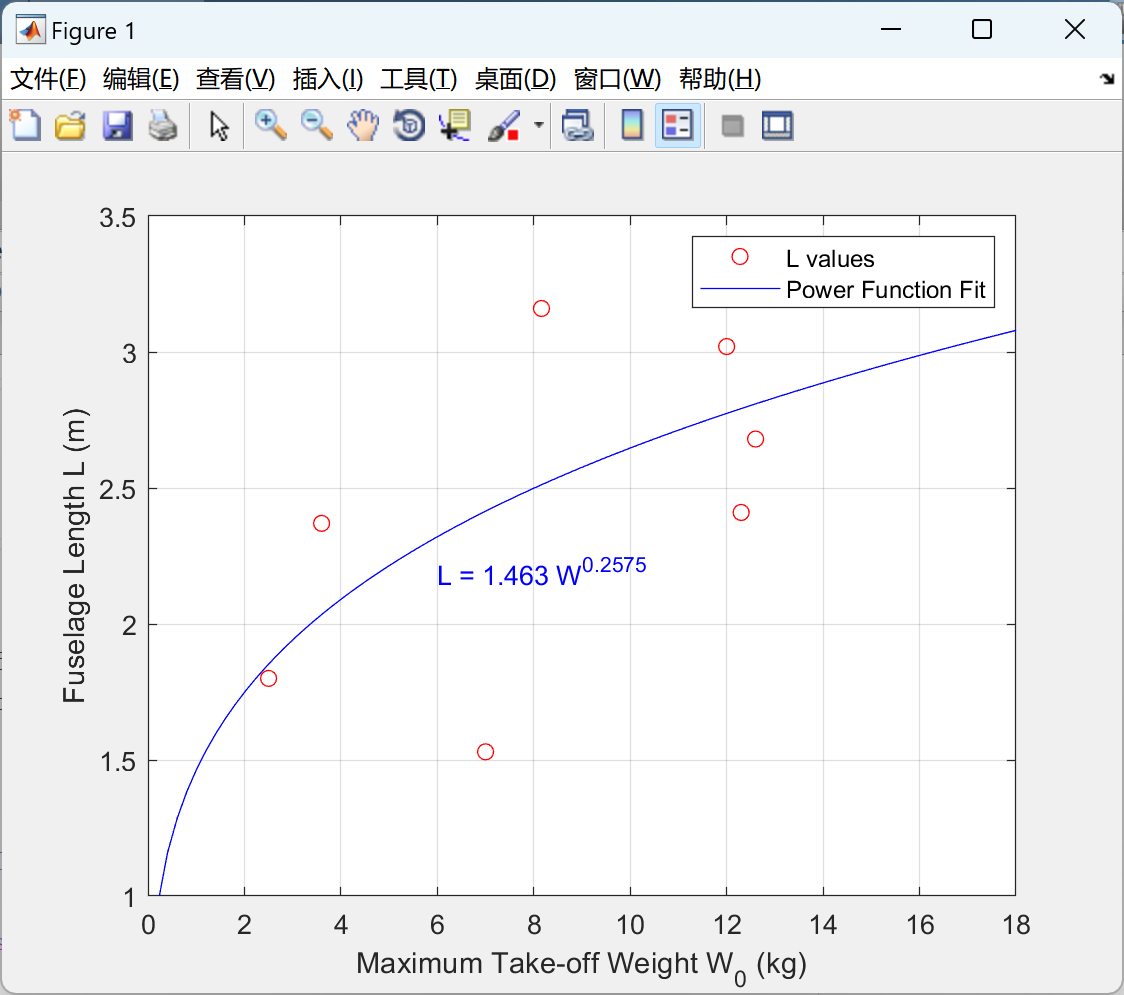
【无人机】太阳能伪卫星VoLTE无人机设计(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
无人机控制的研究现状及关键技术
无人机作为一种新型的航空器具,已经在军事、民用和科研等领域得到了广泛的应用。本文综述了无人机控制的研究现状及关键技术,包括无人机的应用领域、无人机的控制算法等方面。最后,对未来无人机控制的发展趋势进行了展望。
关键词࿱…

Z410 2023款无人机,专为零基础开发者打造的入门级开源无人机
为什么开发Z410升级款-Easydrone无人机
新手开发者通常在本科阶段加入人工智能行业,对无人机二次开发往往一知半解,面临着C、Python、ROS和mavlink等一系列入门知识,学习起来非常困难,学习的过程中也面临许多挫折。为了帮助零基础…

基于非洲秃鹫算法的无人机航迹规划-附代码
基于非洲秃鹫算法的无人机航迹规划 文章目录 基于非洲秃鹫算法的无人机航迹规划1.非洲秃鹫搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用非洲秃鹫算法来优化无人机航迹规划。 …

无人机如何做到自动巡检?关键技术步骤分析
无人机应用在电网、水利、交通、城管等巡逻巡检领域带来了巡视效率的提升。同时飞手操作的难度和门槛、野外环境的影响、巡检结果处理难度大等带来一系列的巡检问题,自动化的无人机巡检则能很好的解决这些问题,比如我们比较熟知的自动机场,它…
可以实现2路(4通道)FlexRay总线
可以实现2路(4通道)FlexRay总线的汽车、无人机等高可靠性通讯应用解决方案。 FlexRay总线的出现汽车和无人机通讯领域,为高可靠性通讯应用提供了一种新的解决方案。FlexRay总线具有高速、高可靠性、灵活性等特点,可以满足汽车、无…

SpaceX预计到2022年Starlink用户将达到2000万,但最终达到了100万
SpaceX的Starlink部门还没有接近实现客户和收入的预测,该公司在建立卫星网络之前与投资者分享了这一点华尔街日报报道今天出版。
据报道,2015年的一份题为“SpaceX用来从投资者那里筹集资金”的报告预计,到2022年,Starlink的订户…
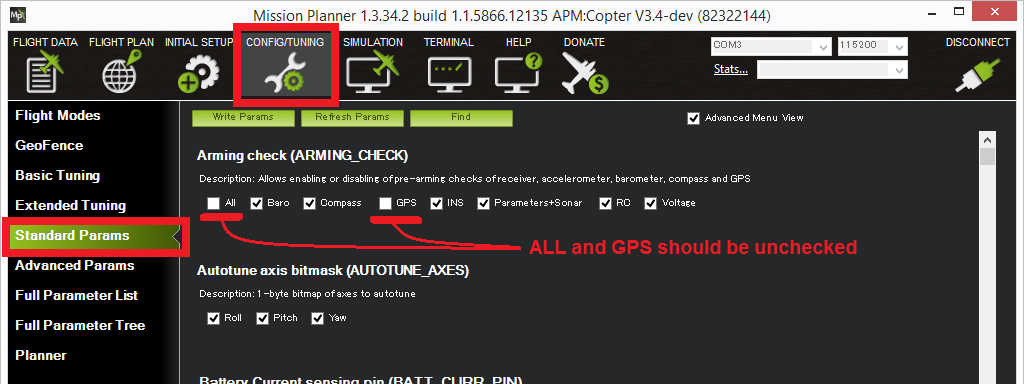
(25)(25.1) 光学流量传感器的测试和设置
文章目录
25.1.1 测试传感器
25.1.2 校准传感器
25.1.3 测距传感器检查
25.1.4 预解锁检查
25.1.5 首次飞行
25.1.6 第二次飞行
25.1.7 正常操作设置
25.1.8 视频示例(Copter-3.4)
25.1.9 空中校准 25.1.1 测试传感器
将传感器连接至自动驾驶仪…
基于深度强化学习的四旋翼无人机航线跟随
源自:指挥与控制学报
作者:杨志鹏 李波 甘志刚 梁诗阳
摘 要
针对无人机在空中执行航线跟随任务时无法对未知环境作出合理应对措施等问题, 提出了一种基于深度强化学习的四 旋翼无人机航线跟随方法. 通过无人机受力分析、欧拉角变换建立四旋翼无人…
STM32-无人机-电机-定时器基础知识与PWM输出原理
电机控制基础——定时器基础知识与PWM输出原理 - 掘金单片机开发中,电机的控制与定时器有着密不可分的关系,无论是直流电机,步进电机还是舵机,都会用到定时器,比如最常用的有刷直流电机,会使用定时器产生PW…

无人机航测没信号?北斗卫星来解决
无人机航测是利用无人机进行地理信息的采集和处理的航测方式。相比传统的航测手段,无人机航测具备更高的灵活性、更低的成本和更广阔的适应性。无人机航测可以应用于土地测绘、农业植保、城市规划、自然资源调查等多个领域,极大地提高了测绘的效率和准确…

全国首台!浙江机器人产业集团发布垂起固定翼无人机-机器人自动换电机巢
展示突破性创新技术,共话行业发展趋势。8月25日,全国首台垂起固定翼无人机-机器人自动换电机巢新品发布会暨“科创中国宁波”无人机产业趋势分享会在余姚市机器人小镇成功举行。 本次活动在宁波市科学技术协会、余姚市科学技术协会指导下,由浙…
AUTOSAR从入门到精通-【应用篇】面向车联网的车辆攻击方法及入侵检测(续)
目录
面向车联网的车辆攻击方法设计
3.1 车载 T-BOX 的设计
3.1.1 功能模式
3.1.2 硬件环境搭建
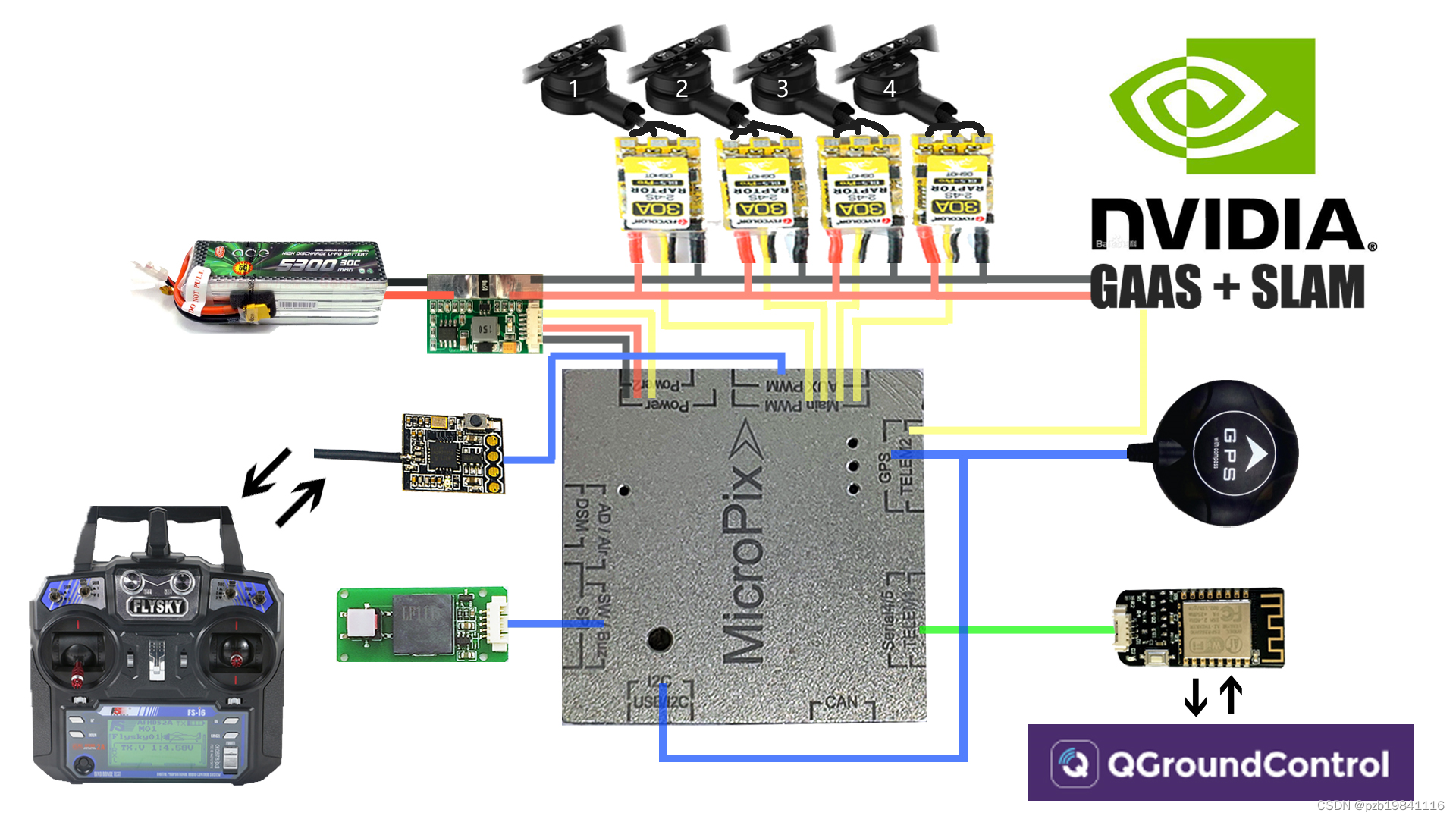
无人机自主飞行实战入门-第一课(简介)
研究的意义:对人类操作的严重依赖,严重阻碍了泛无人机行业的发展。 飞行汽车(UAM)即将到来,不论是从成本还是安全考虑都需要自主飞行。 传统飞控基于STM32架构设计,无法满足更智能功能所需的计算量…

(6)(6.2) 任务命令
文章目录 前言
6.2.1 概述
6.2.2 导航命令
6.2.3 条件命令
6.2.4 DO命令 前言
本文介绍了 Copter、Plane 和 Rover 切换到自动模式时支持的任务指令。
!Warning
这是一项正在进行中的工作,尚未经过全面审核。有关 Copter 的更佳列表,请…

基于袋獾算法的无人机航迹规划-附代码
基于袋獾算法的无人机航迹规划 文章目录 基于袋獾算法的无人机航迹规划1.袋獾搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用袋獾算法来优化无人机航迹规划。 1.袋獾搜索算法
…
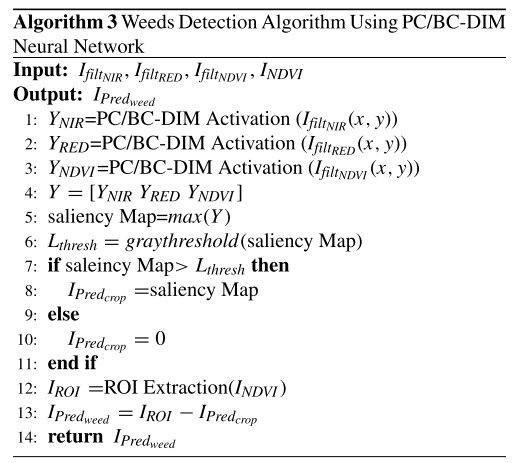
基于显著性的无人机多光谱图像语义杂草检测与分类
Saliency-Based Semantic Weeds Detection and Classification Using UAV Multispectral Imaging(2023) 摘要1、介绍2、相关工作2.1 监督学习2.2 半监督学习2.3 无监督学习 3、方法3.1 贡献3.2 PC/BC-DIM NEURAL NETWORK(预测编码/有偏竞争-分裂输入调制…
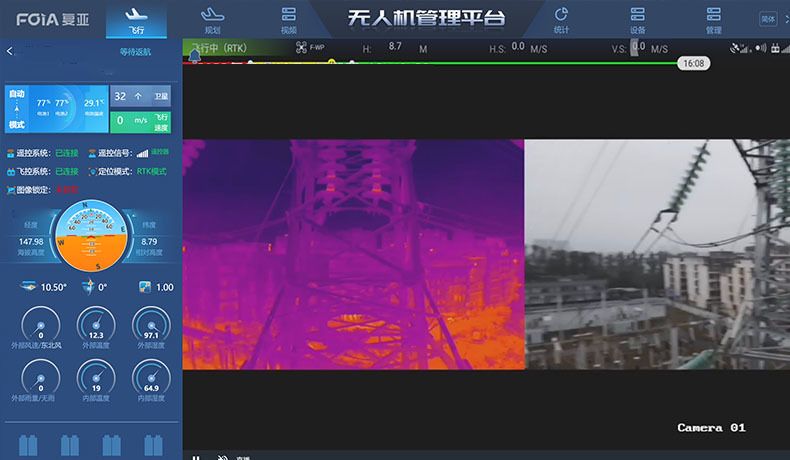
无人机精细化巡检方案制定:提高效率与准确性的关键
在当前技术日新月异的时代,无人机在多个领域的应用已成为行业标配。但如何制定出一套有效、细致的无人机巡检方案,确保其最大效能,成为许多组织与公司的核心议题。其中,复亚智能在此领域已展现出了卓越的实力与深入的见解。 1. 精…
目标检测YOLO实战应用案例100讲-基于YOLO网络架构的无人机视角下的小目标检测算法研究与应用
目录
前言 基于YOLO-Drone的无人机视角下的小目标检测
2.1 问题描述
2.2 基于YOLO-Drone的小

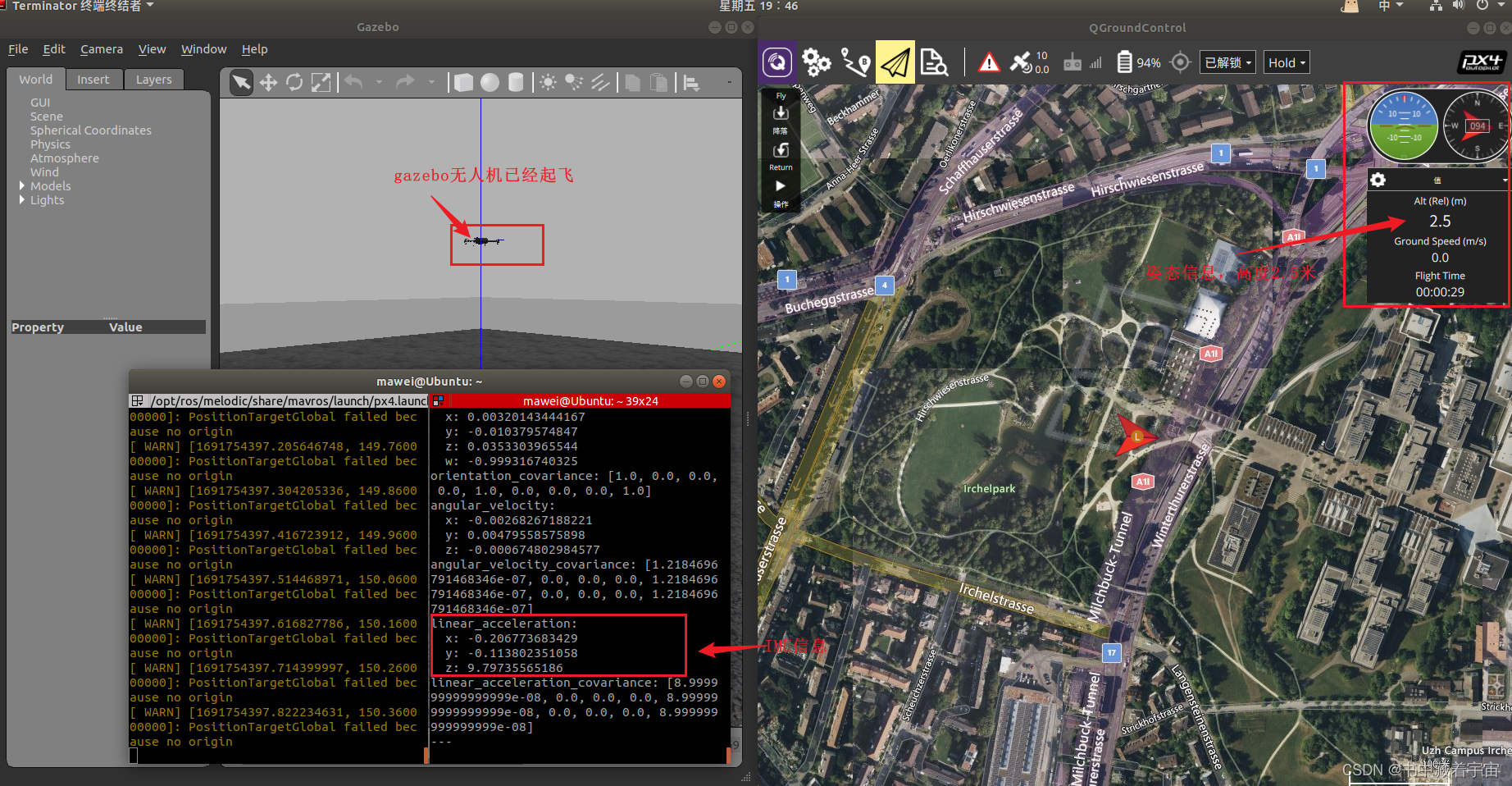
gazebo与PX4联合仿真
自主无人机定义 功能框架 开发流程 项目代码框架 项目流程 gazebo的文件类型 仿真的类型
⮚ SITL 全称为Software in the loop,即软件在换仿真。 ⮚ 仿真首先分为软件在环仿真(SITL)和硬件在环仿真(HITL&a…
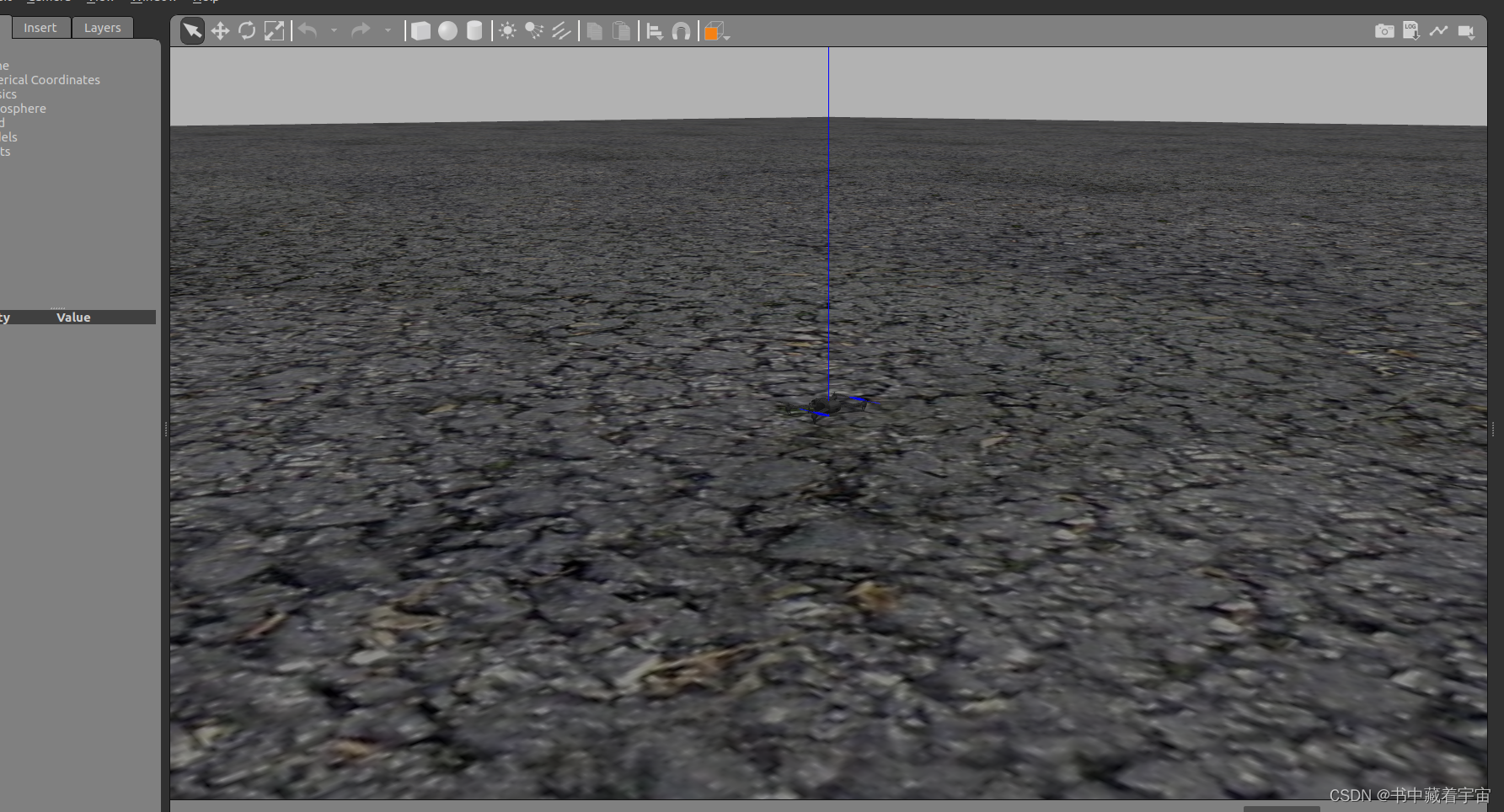
Ubuntu18.04搭配无人机仿真环境(ROS,PX4,gazebo,Mavros,QGC安装教程)
Ubuntu18.04搭配无人机仿真环境 ROS环境配置版本安装 gazebo安装Mavrosa安装PX4源码下载和编译运行仿真地面站安装 ROS环境配置
我个人使用了代理环境进行下载。Linux没有代理的可以使用国内源。
清华大学源 sudo sh -c ‘. /etc/lsb-release && echo “deb http://m…
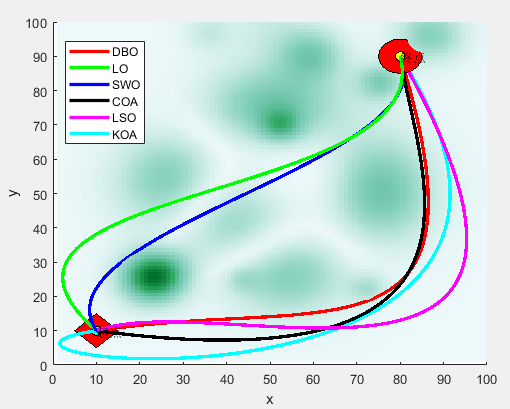
无人机航迹规划:六种最新智能优化算法(DBO、LO、SWO、COA、LSO、KOA)求解无人机路径规划MATLAB
一、六种算法(DBO、LO、SWO、COA、LSO、KOA)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为…

基于鸟群算法的无人机航迹规划-附代码
基于鸟群算法的无人机航迹规划 文章目录 基于鸟群算法的无人机航迹规划1.鸟群搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用鸟群算法来优化无人机航迹规划。 1.鸟群搜索算法
…
“Python+”集成技术高光谱遥感数据处理与机器学习深度应用
本内容提供一套基于Python编程工具的高光谱数据处理方法和应用案例。涵盖高光谱遥感数据处理的基础、python开发基础、机器学习和应用实践。重点解释高光谱数据处理所涉及的基本概念和理论,在帮助深入理解科学原理。结合Python编程工具,专注于解决高光谱…

基于饥饿游戏算法的无人机航迹规划-附代码
基于饥饿游戏算法的无人机航迹规划 文章目录 基于饥饿游戏算法的无人机航迹规划1.饥饿游戏搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用饥饿游戏算法来优化无人机航迹规划。 …

基于龙格-库塔算法的无人机航迹规划-附代码
基于龙格-库塔算法的无人机航迹规划 文章目录 基于龙格-库塔算法的无人机航迹规划1.龙格-库塔搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用龙格-库塔算法来优化无人机航迹规划…

室内探索无人机,解决复杂环境下的任务挑战!
前言
室内探索无人机是一种专为在室内环境中进行任务的无人机系统。相比传统的人员部署,室内探索无人机具有更高的灵活性和机动性,能够在复杂的室内环境中执行任务,用于未知环境的探索和特定目标的搜索。
为完成无人机室内搜索与识别等复杂…

(10)(10.9) 术语表(一)
文章目录
前言
1 2.4Ghz
2 AGL
3 AHRS
4 APM
5 AMA
6 Arduino
7 APM (AutoPilot Mega)
8 ATC
9 Copter
10 Plane
11 Rover
12 BEC
13 Bootloader
14 COA
15 DCM
16 Eagle file
17 ESC
18 Firmware
19 FPV
20 FTDI 前言
!Note
术语表未编入索…
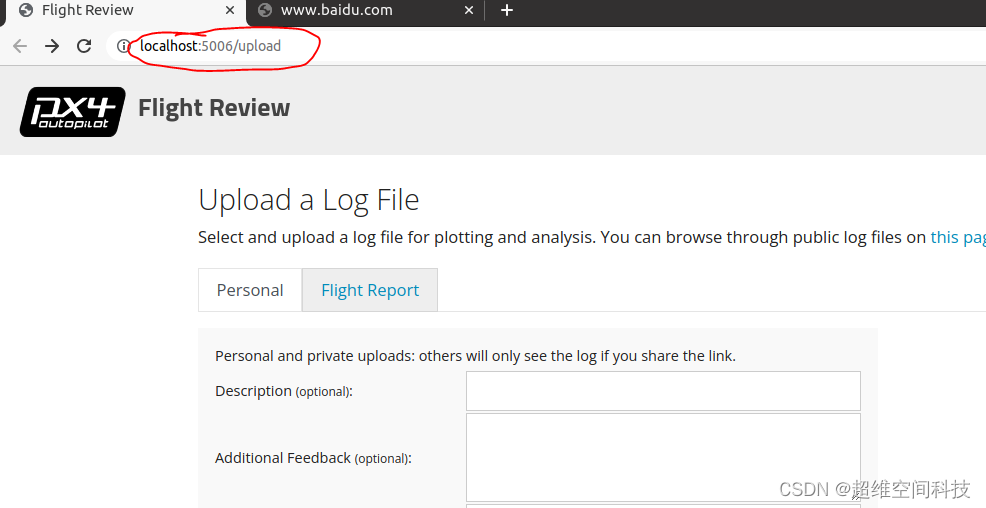
离线安装PX4日志分析工具Flight Review
使用Flight Review在线分析日志,有时会因为网络原因无法使用
使用离线安装的方式使用Flight Review,可以在无需网络的情况下使用Flight Review
sudo apt-get install sqlite3 fftw3 libfftw3-devsudo apt-get install libatlas3-basegit clone --recur…

(10)(10.8) 固件下载
文章目录
前言
10.8.1 固件
10.8.2 Bootloader
10.8.3 APM2.x Autopilot
10.8.4 许可证
10.8.5 安全 前言
固件服务器(firmware server)可提供所有飞行器的最新固件。其中包括:
CopterPlaneRoverAntennaTrackerSub
本页提供了一些被视为&quo…
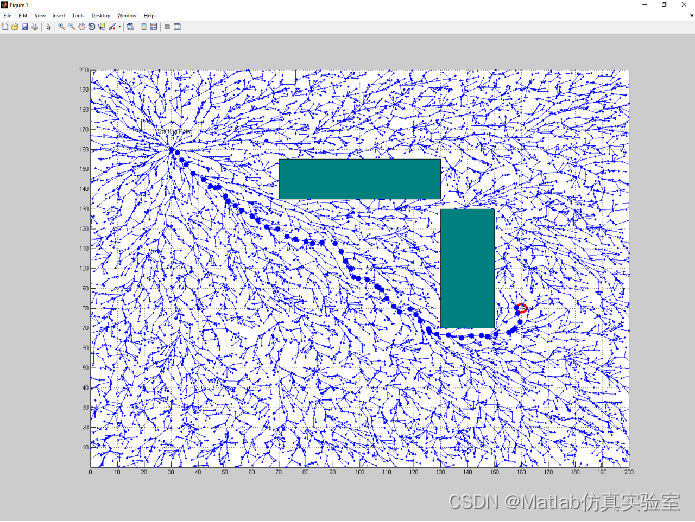
基于Matlab利用IRM和RRTstar实现无人机路径规划(附上源码+数据+说明+报告+PPT)
无人机路径规划是无人机应用领域中的关键问题之一。本文提出了一种基于IRM(Informed RRTstar Method)和RRTstar(Rapidly-exploring Random Tree star)算法的无人机路径规划方法,并使用Matlab进行实现。该方法通过结合I…
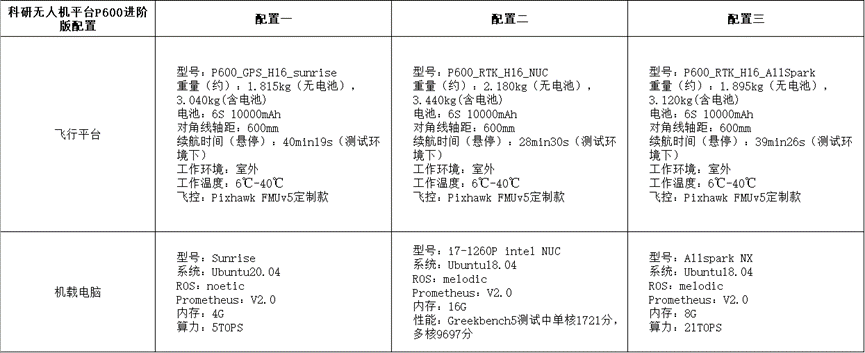
科研无人机平台P600进阶版,突破科研难题!
随着无人机技术日益成熟,无人机的应用领域不断扩大,对无人机研发的需求也在不断增加。然而,许多开发人员面临着无法从零开始构建无人机的时间和精力压力,同时也缺乏适合的软件平台来支持他们的开发工作。为了解决这个问题…
基于PID优化和矢量控制装置的四旋翼无人机(MatlabSimulink实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…

(7)(7.1) 使用航点和事件规划任务
文章目录
前言
7.1.1 设置Home位置
7.1.2 视频:制作并保存多路点任务
7.1.3 视频:加载已保存的多航点任务
7.1.4 使用说明
7.1.5 提示
7.1.6 自动网格
7.1.7 任务指令
7.1.8 任务结束
7.1.9 任务重置
7.1.10 MIS_OPTIONS
7.1.11 任务再出发 …

无人机跟随一维高度避障场景--逻辑分析
无人机跟随一维高度避障场景--逻辑分析 1. 源由2. 视频3. 问题3.1 思维发散3.2 问题收敛 4. 图示4.1 水平模式4.2 下坡模式4.3 上坡模式4.4 碰撞分析 5. 总结5.1 一维高度避障场景5.2 业界跟随产品5.3 APM集成跟随 6. 参考资料7. 补充资料 - 大疆智能跟随7.1 炸机7.2 成功 1. 源…

(7)(7.4) 集结航点
文章目录
7.4.1 概述
7.4.2 设置集结航点
7.4.3 飞行示例
7.4.4 附录 7.4.1 概述
通常情况下,当固定翼或旋翼飞机进入"返回发射"(Return to Launch (RTL))模式(通常由自动驾驶仪失控保护触发)(failsafe)时,默认行为…
基于smardaten无代码开发智能巡检系统,让无人机飞得更准
目录 引言需求背景搭建思路开发过程(1)无人机设备数据接入(2)无人机巡检任务管理(3)无人机三维防控监视(4)运防一体化大屏设计(5)异常告警管理(6&…
(六)Tiki-taka算法(TTA)求解无人机三维路径规划研究(MATLAB)
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、Tiki-taka算法(TTA…

基于供需算法的无人机航迹规划-附代码
基于供需算法的无人机航迹规划 文章目录 基于供需算法的无人机航迹规划1.供需搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用供需算法来优化无人机航迹规划。 1.供需搜索算法
…

基于粒子群算法的无人机航迹规划-附代码
基于粒子群算法的无人机航迹规划 文章目录 基于粒子群算法的无人机航迹规划1.粒子群搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用粒子群算法来优化无人机航迹规划。 1.粒子群…

基于蚁狮算法的无人机航迹规划-附代码
基于蚁狮算法的无人机航迹规划 文章目录 基于蚁狮算法的无人机航迹规划1.蚁狮搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用蚁狮算法来优化无人机航迹规划。 1.蚁狮搜索算法
…
10.27 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招&实习|迦智科技 2024届秋季校园招聘正式启动
校招&实习|迦智科技 2024届秋季校园招聘正式启动 2、校招 | 粤港澳大湾区国家技术创新中心2024校园招聘正…

无人机“长坡”上,谁是滚出“厚雪球”的长期主义者?
“股神”巴菲特,曾提出过“长坡厚雪”的理论:
人生就像滚雪球,重要的是发现很湿的雪和很长的坡。
运用到企业经营上,“长坡”指的是企业所布局的领域发展潜力足、空间大;而“湿雪”,指的是企业竞争力强、…
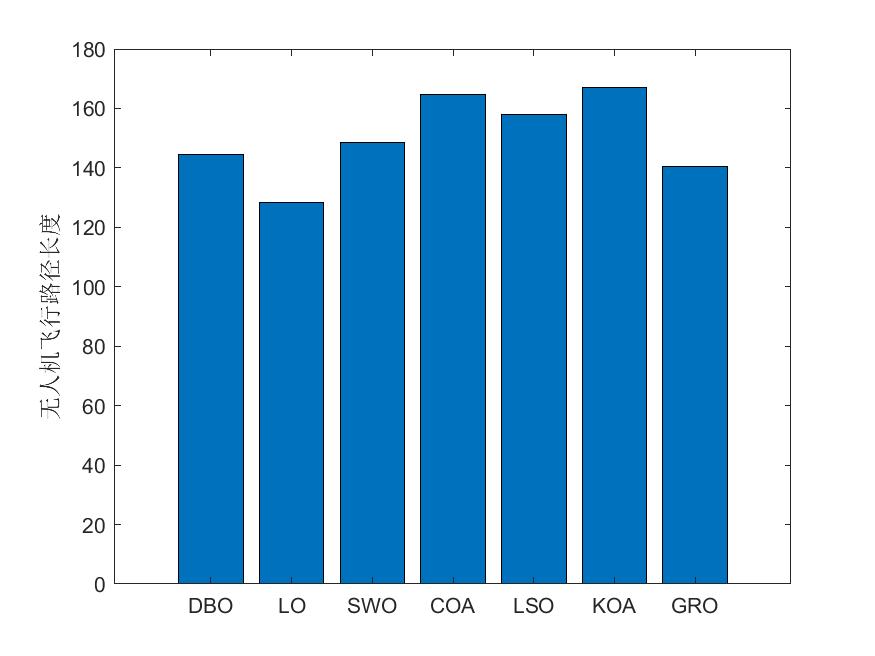
(五)七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…
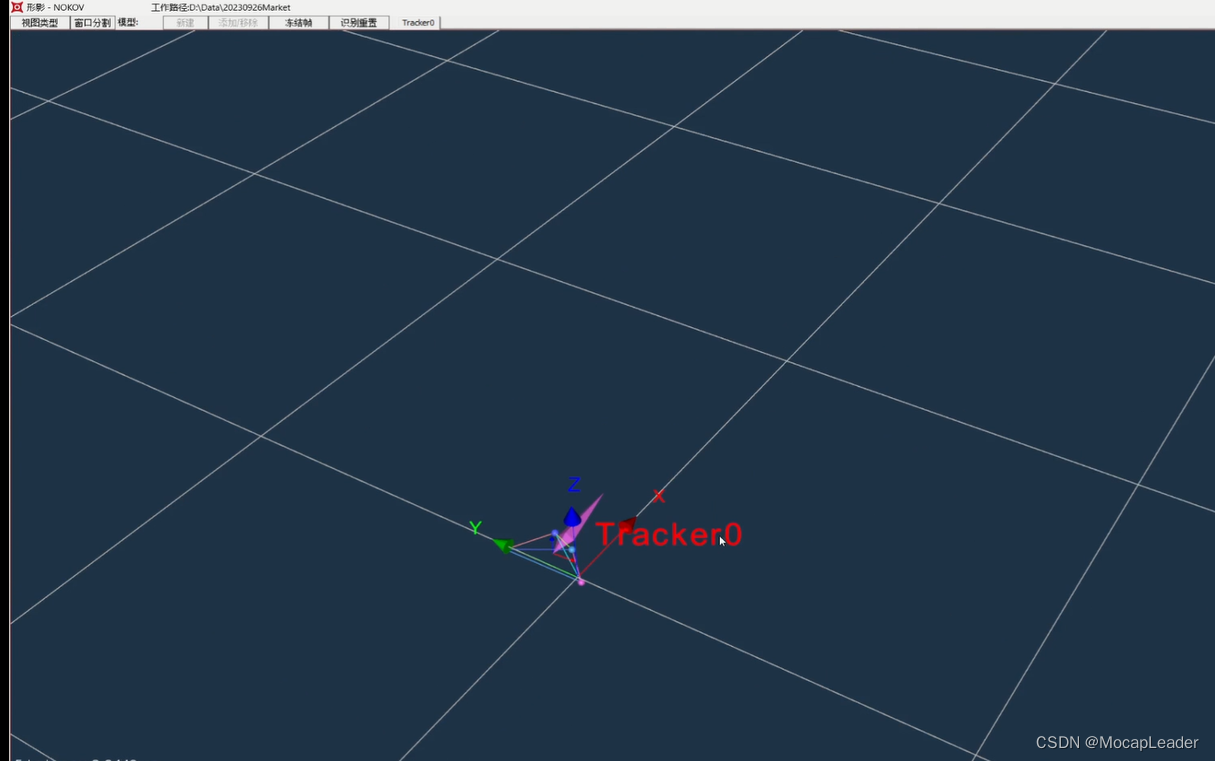
动作捕捉系统进行坐标系转换
动作捕捉系统在机器人等应用中常出现被测物与动捕坐标系不一致的问题。这时就需要进行坐标系的转换。在NOKOV度量动作捕捉系统软件中,可以对被测物的坐标系原点偏移量进行设置,实现被测物坐标系与大地坐标系的重合。
一、坐标系偏移操作
在形影动捕软件…

基于鲸鱼算法的无人机航迹规划-附代码
基于鲸鱼算法的无人机航迹规划 文章目录 基于鲸鱼算法的无人机航迹规划1.鲸鱼搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用鲸鱼算法来优化无人机航迹规划。 1.鲸鱼搜索算法
…

无人机电力巡检:国网安徽实际案例解析
在科技快速发展的今天,传统行业正在经历前所未有的转型。电力巡检,这一看似传统且乏味的任务,却因为无人机技术的介入而焕发新生。今天,让我们深入了解一个具体的案例,探索无人机如何革新电力巡检。 案例背景ÿ…

无人机支持的空中无蜂窝大规模MIMO系统中上行链路分布式检测
无人机支持的空中无蜂窝大规模MIMO系统中上行链路分布式检测 无人机支持的空中无蜂窝大规模MIMO系统中上行链路分布式检测介绍题目一. 背景(解决的问题)二. 系统模型2.1 信道模型2.1.1 信道系数2.1.2 进行标准化 2.2 信道估计 和 数据传输2.2.1 信道估计…
(1)(1.7) GY-US42声纳
文章目录
前言
1 连接方式
2 参数说明 前言
GY-US042v2 声纳是一款非常便宜的短程(最多 4m)测距仪,主要设计用于室内,但也成功用于室外的 Copter。与许多气压计相比,它能更稳定地控制 4m 以下的高度。 1 连接方式…
超维空间S2无人机使用说明书——51、使用yolov8进行目标跟踪
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C的yolov3和yolov4,以及yolov7。
简介,为了提高识别速度,系统采用了G…

无人机遥控中应用的2.4GHz无线芯片
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。是一种不需要人操控就能够自主飞行的飞行器,它可以执行多种任务ÿ…

基于吉萨金字塔建造算法的无人机航迹规划-附代码
基于吉萨金字塔建造算法的无人机航迹规划 文章目录 基于吉萨金字塔建造算法的无人机航迹规划1.吉萨金字塔建造搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用吉萨金字塔建造算法…
【AI视野·今日Robot 机器人论文速览 第六十三期】Thu, 26 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 27 Oct 2023 Totally 27 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
6-DoF Stability Field via Diffusion Models Authors Takuma Yoneda, Tianchong Jiang, Gregory Shakhnarovich, Matthew R. …
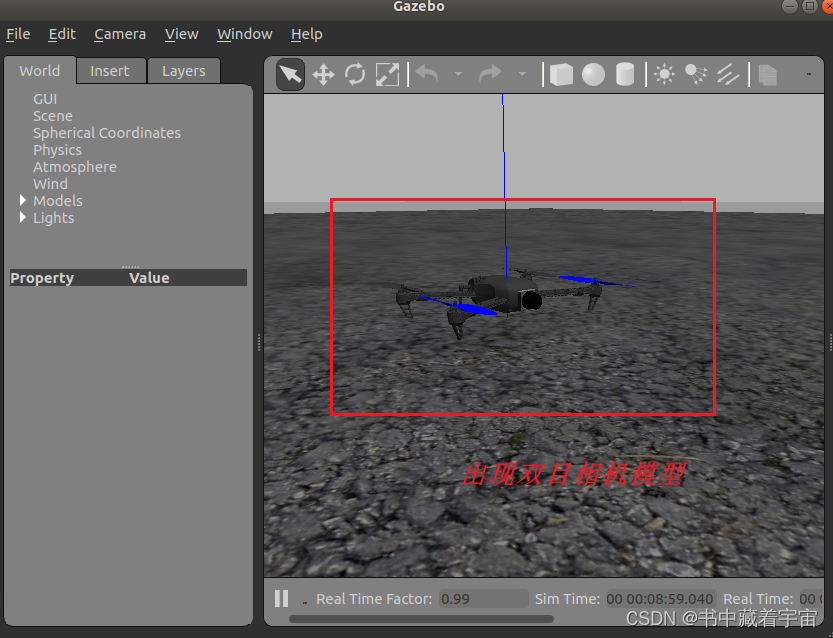
px4的gazebo仿真相机模型报错解决办法,返回值256
👉事情起因:我想做关于PX4无人机的摄像头仿真,根据PX4的官网文件 Tools/sitl_gazebo文件夹里面有对应的模型可以使用,我就想在mavros_posix_sitl文件里面修改vehicle参数,比如直接将vehicle“iris_stereo_camera”。然…

关于无人机上层控制的PID算法的思考
一、前言
背景介绍:PID虽然出现了很多年,但是目前工业界还是把PID作为主流的控制算法(尽管学术界有很多非常时尚的控制算法,包括鲁邦控制,神经网络控制等等),PID的算法在于其不需要对系统进行复…

基于卷尾猴算法的无人机航迹规划-附代码
基于卷尾猴算法的无人机航迹规划 文章目录 基于卷尾猴算法的无人机航迹规划1.卷尾猴搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用卷尾猴算法来优化无人机航迹规划。 1.卷尾猴…

基于鹰栖息算法的无人机航迹规划-附代码
基于鹰栖息算法的无人机航迹规划 文章目录 基于鹰栖息算法的无人机航迹规划1.鹰栖息搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用鹰栖息算法来优化无人机航迹规划。 1.鹰栖息…

基于蜜獾算法的无人机航迹规划-附代码
基于蜜獾算法的无人机航迹规划 文章目录 基于蜜獾算法的无人机航迹规划1.蜜獾搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用蜜獾算法来优化无人机航迹规划。 1.蜜獾搜索算法
…
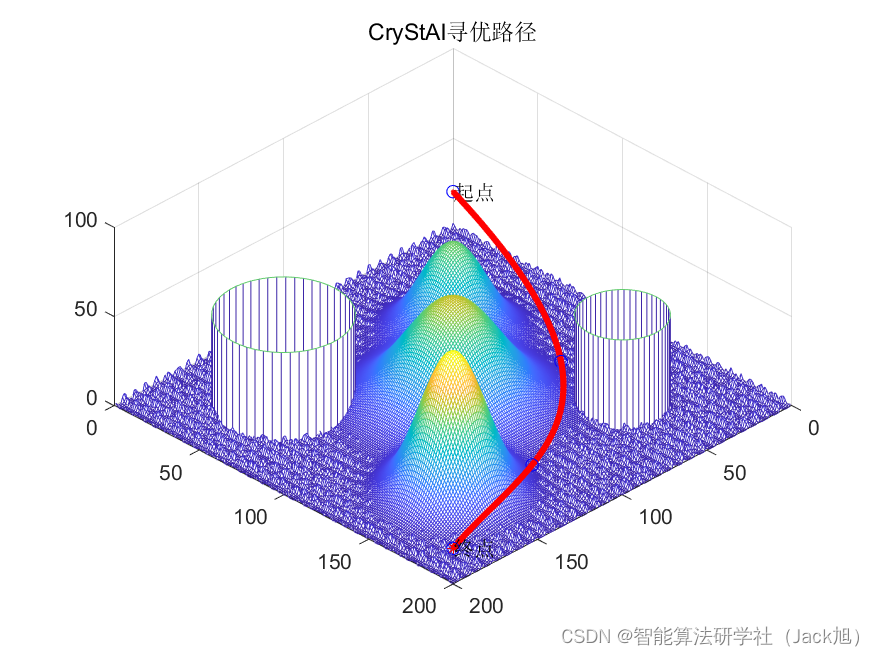
基于晶体结构算法的无人机航迹规划-附代码
基于晶体结构算法的无人机航迹规划 文章目录 基于晶体结构算法的无人机航迹规划1.晶体结构搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用晶体结构算法来优化无人机航迹规划。 …
RflySim | 滤波器设计实验一
滤波器设计实验一 一. 无人机滤波器简介
无人机在飞行时会使用滤波器来处理传感器数据、控制飞行和稳定飞行,以及实现导航和定位等功能。卡尔曼滤波器是无人机领域中常见滤波器类型之一,也称为线性二次型估计,能够从一系列不完全且包含噪声不…

基于鹈鹕算法的无人机航迹规划-附代码
基于鹈鹕算法的无人机航迹规划 文章目录 基于鹈鹕算法的无人机航迹规划1.鹈鹕搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用鹈鹕算法来优化无人机航迹规划。 1.鹈鹕搜索算法
…

px4+vio实现无人机室内定位
文章主要讲述px4 如何利用vins_fusion里程计数据实现在室内定位功能。
文章基于以下软、硬件展开。
硬件软件机载电脑: Intel NUC系统:Ubuntu 20.04相机: Intel Realsense D435iros:noetic飞控:Pixhawk 2.4.8固件&am…
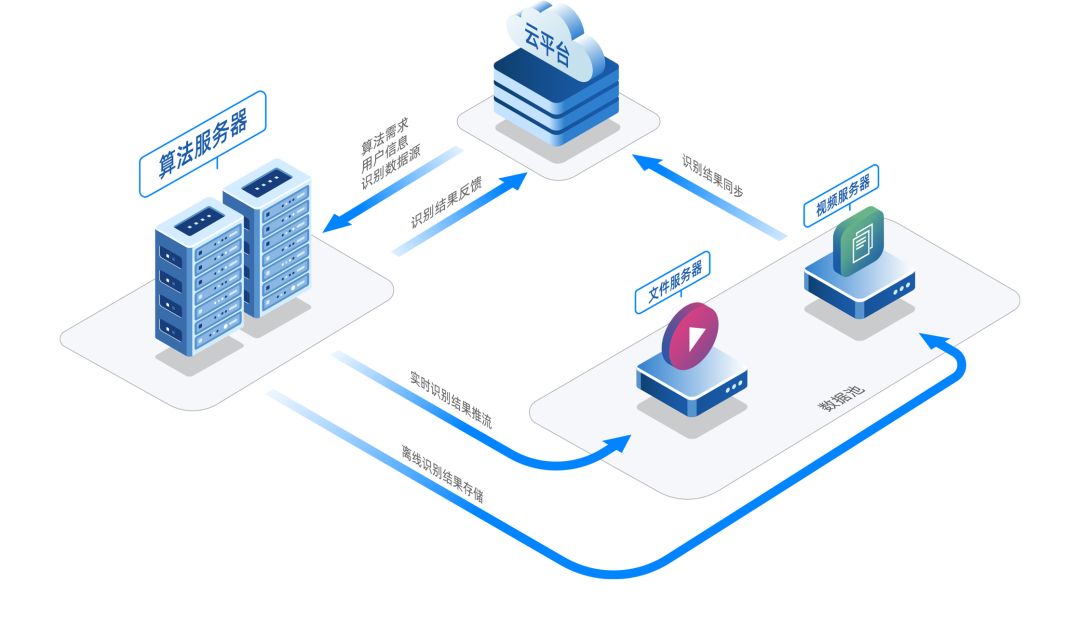
无人机巡检如何做到实时识别,从数据到模型全流程解读
在数字化和自动化飞速发展的今天,AI识别算法正在加速进入行业生产系统。 基于巡检数据的智能开发,识别算法突破性进展的核心驱动力在于需求——从全天候巡视的平安城市,到潮汐变化的交通网络,从广阔的水域,到繁忙的街道…

基于卷积优化算法的无人机航迹规划-附代码
基于卷积优化算法的无人机航迹规划 文章目录 基于卷积优化算法的无人机航迹规划1.卷积优化搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用卷积优化算法来优化无人机航迹规划。 …

无人机红外相机的畸变矫正
在项目开展过程中,发现大疆M30T的红外相机存在比较明显的畸变问题,因此需要对红外图像进行畸变矫正。在资料检索过程中,发现对红外无人机影像矫正的资料较少,对此,我从相机的成像原理角度出发,探索出一种效…
论文速览 | TRS 2023: 使用合成微多普勒频谱进行城市鸟类和无人机分类
注1:本文系“最新论文速览”系列之一,致力于简洁清晰地介绍、解读最新的顶会/顶刊论文 论文速览 | TRS 2023: Urban Bird-Drone Classification with Synthetic Micro-Doppler Spectrograms 原始论文:D. White, M. Jahangir, C. J. Baker and M. Antoniou, “Urban Bird-Drone…
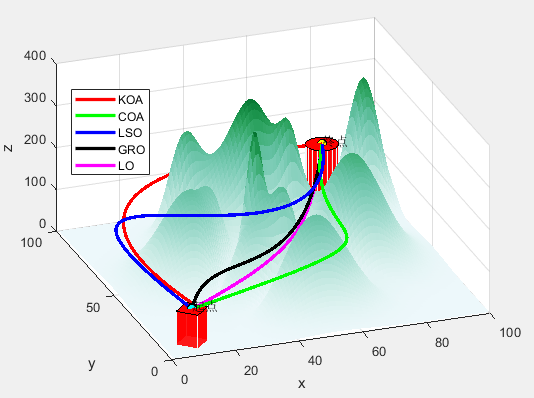
无人机航迹规划:五种最新智能优化算法(KOA、COA、LSO、GRO、LO)求解无人机路径规划MATLAB
一、五种算法(KOA、COA、LSO、GRO、LO)简介
1、开普勒优化算法KOA
开普勒优化算法(Kepler optimization algorithm,KOA)由Mohamed Abdel-Basset等人于2023年提出。五种最新优化算法(SWO、ZOA、EVO、KOA、…
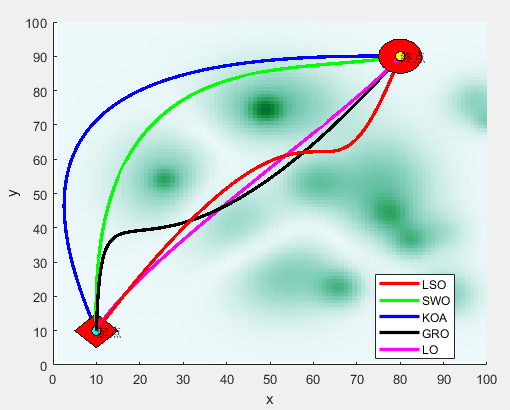
无人机航迹规划:五种最新智能优化算法(LSO、SWO、KOA、GRO、LO)求解无人机路径规划MATLAB
一、五种算法(LSO、SWO、KOA、GRO、LO)简介
1、光谱优化算法LSO
光谱优化算法(Light Spectrum Optimizer,LSO)由Mohamed Abdel-Basset等人于2022年提出。MD-MTSP:光谱优化算法LSO求解多仓库多旅行商问题M…
使用EvoMap/Three.js模拟无人机灯光秀
一、创建地图对象
首先我们需要创建一个EM.Map对象,该对象代表了一个地图实例,并设置id为"map"的文档元素作为地图的容器。 let map new EM.Map("map",{zoom:22.14,center:[8.02528, -29.27638, 0],pitch:71.507,roll:2.01,maxPit…

【刚体姿态运动学】角速度和欧拉角速率的换算关系的详细推导
0 引言
本文以一种新的角度推导刚体姿态运动学,也即角速度和欧拉角速率之间的换算,不同于相似博文的地方在于,本文旨在从原理上给出直观清晰生动的解释。将详细过程记录于此,便于后续学习科研查找需要。
1 符号
符号含义 { E }…
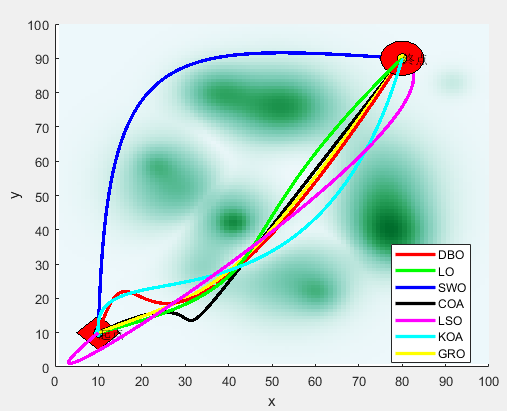
无人机航迹规划:七种智能优化算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划--提供MATLAB代码
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…
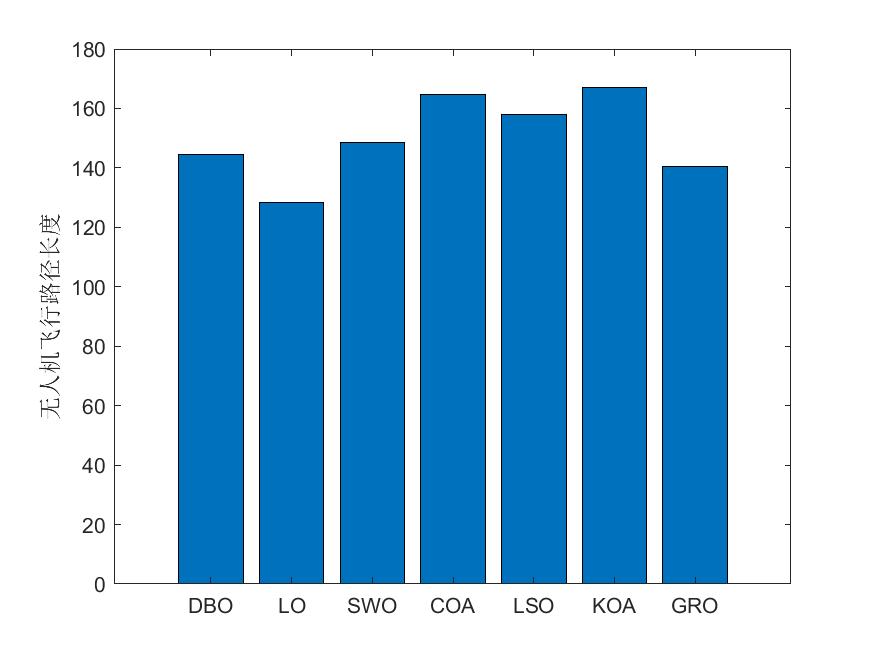
(三)七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划MATLAB
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…

无人机在三维空间中的转动问题
前提
这篇博客是对最近一个有关无人机拍摄图像项目中所学到的新知识的一个总结,比较杂乱,没有固定的写作顺序。
无人机坐标系旋转问题 上图是无人机坐标系,绕x轴是翻滚(Roll),绕y轴是俯仰(Pitch),绕z轴是偏航(Yaw)。…
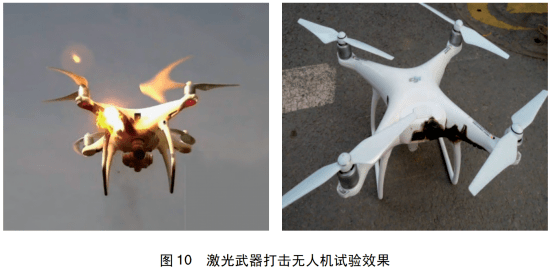
要地防控反无人机系统及其关键技术
源自:《指挥控制与仿真》
作者:夏铭禹,赵 凯,倪 威
“人工智能技术与咨询”发布 要地防控反无人机系统及其关键技术
人们对未来战争以及战场特点的理解,因领域、立场、层面等因素的差异而不尽相同,由此出…

赛事回顾 | 首届“智航杯“全国无人机智能算法竞赛落幕
11月28日,首届“智航杯”全国无人机智能算法竞赛实物赛在海南省三亚市成功落下帷幕。此次竞赛自2023年4月启动以来,共有来自全国145所高等院校和50多所企事业单位的1253支团队、3655人报名参赛,最终有6支队伍脱颖而出,入围了实物赛…
无人机高空巡查+智能视频监控技术,打造森林防火智慧方案
随着冬季的到来,森林防火的警钟再次敲响,由于森林面积广袤,地形复杂,且人员稀少,一旦发生火灾,人员无法及时发现,稍有疏忽就会酿成不可挽救的大祸。无人机高空巡查智能视频监控是一种非常有效的…

智能巡视新飞跃,揭秘巡检无人机的应用与意义
在科技迅猛发展的今天,无人机技术逐渐渗透各行各业,巡检领域尤为引人关注。本文将深入探索巡检无人机的广泛应用与其背后的深远意义。
一、巡检无人机的应用场景
如今巡检无人机已成为各行各业的利器,在电力、交通、环保等领域,…

湖南电网启用输电线路无人机巡视,提升电力运维水平
国网湖南电网近期成功引入输电线路无人机巡视技术,实现了电力运维的全新突破。此创新模式通过全自主飞行、自主巡检,极大提高了电力线路运维效率,确保了电网的安全稳定。 一、全自动巡检,无人值守
在输电线路无人机巡视作业现场&…

无人机电力巡检系统运行流程全解读
随着电力行业体系不断完善,保障电网运营的安全成为至关重要的任务。传统的人工巡检方式在面对电力设备广泛分布和复杂工况时显得效率低下,为了解决这一难题,无人机电力巡检系统应运而生,以智能化的运行流程,为电网安全…

无人机集群路径规划MATLAB:孔雀优化算法POA求解无人机集群三维路径规划
一、无人机模型简介
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
二、孔雀优化算法POA介绍
孔雀优化算法( Peafowl Optimization Algorithm, POA), 是由 Jingbo Wang 等于2022 年提出的一种群体智能优化算法。其灵感来源于孔雀的群体行为。
智能优化算法&am…

便利高效双赢:无人机油气管道巡检全面升级
我国庞大的油气管道网络,包括原油、成品和天然气管道,因为地理区域广泛、建设年代久远、安全事故频发等现实因素,对管道的安全巡护与管理提出了更高的需求。在这一背景下,传统的人工巡护方式显然已经难以满足对高、精、准的要求。…

无人机光伏巡检代替人工,贵州电站运维升级
无人机光伏巡检如何做到降本增效?贵州省光伏电站有新招!某70MWp的光伏电站通过引入复亚智能无人机光伏巡检系统,专注于使用无人机对区域内的光伏面板进行自动巡航巡查,利用自动化巡检和故障识别技术,显著提升了光伏电站…

搭载KaihongOS的工业平板、机器人、无人机等产品通过3.2版本兼容性测评,持续繁荣OpenHarmony生态
近日,搭载深圳开鸿数字产业发展有限公司(简称“深开鸿”)KaihongOS软件发行版的工业平板、机器人、无人机等商用产品均通过OpenAtom OpenHarmony(以下简称“OpenHarmony”)3.2 Release版本兼容性测评,获颁O…
6.如何利用LIO-SAM生成可用于机器人/无人机导航的二维/三维栅格地图--以octomap为例
目录 1 octomap的安装
2 二维导航节点的建立及栅格地图的构建
3 三维栅格地图的建立 1 octomap的安装 这里采用命令安装: sudo apt install ros-melodic-octomap-msgs ros-melodic-octomap-ros ros-melodic-octomap-rviz-plugins ros-melodic-octomap-server 这样…
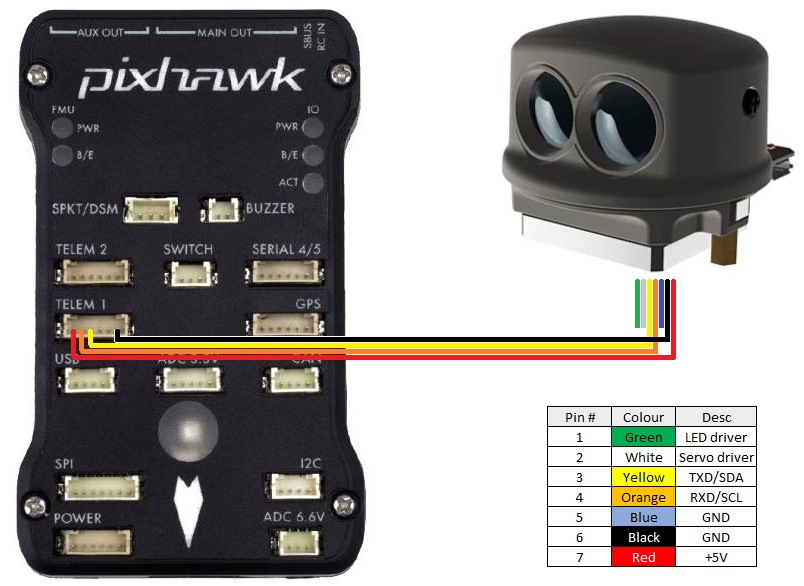
(2)(2.2) Lightware SF45/B(350度)
文章目录
前言
1 安装SF45/B
2 连接自动驾驶仪
3 通过地面站进行配置
4 参数说明 前言
Lightware SF45/B 激光雷达(Lightware SF45/B lidar)是一种小型扫描激光雷达(重约 50g),扫描度可达 350 度,扫描范围 50m。 1 安装SF45…

现代化工安全保障迎来巡查无人机新时代
当今现代化工企业呈现出规模不断扩大,设备逐渐趋向大型化的局面,由此导致化工安全生产面临日益严峻的挑战。然而,随着巡查无人机技术的成熟,这种新的高效手段正在提高化工安全检测的工作效率。 一、传统化工安全巡检存在弊端
化工…
(五)五种最新算法(SWO、COA、LSO、GRO、LO)求解无人机路径规划MATLAB
一、五种算法(SWO、COA、LSO、GRO、LO)简介
1、蜘蛛蜂优化算法SWO
蜘蛛蜂优化算法(Spider wasp optimizer,SWO)由Mohamed Abdel-Basset等人于2023年提出,该算法模型雌性蜘蛛蜂的狩猎、筑巢和交配行为&…

基于花授粉算法的无人机航迹规划
基于花授粉算法的无人机航迹规划 文章目录 基于花授粉算法的无人机航迹规划1.花授粉搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用花授粉算法来优化无人机航迹规划。 1.花授粉…

yolo-nas无人机高空红外热数据小目标检测(教程+代码)
前言
YOLO-NAS是目前最新的YOLO目标检测模型。从一开始,它就在准确性方面击败了所有其他 YOLO 模型。与之前的 YOLO 模型相比,预训练的 YOLO-NAS 模型能够以更高的准确度检测更多目标。但是我们如何在自定义数据集上训练 YOLO NAS?
这将是我…
(1)(1.13) SiK无线电高级配置(一)
文章目录
前言
1 监控链接质量
2 诊断范围问题
3 MAVLink协议说明 前言
本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 !Tip
大多数用户只需要 SiK Radio v2 中提供的基本…
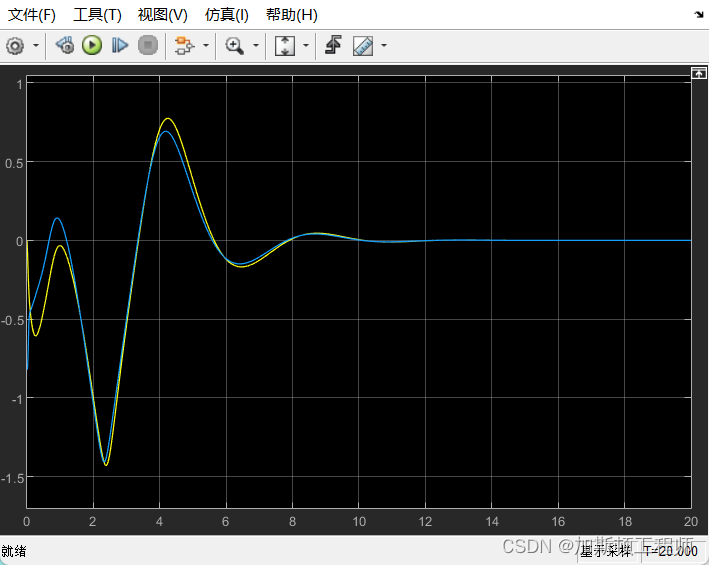
四旋翼无人机PID控制Simulink仿真
底部有完整文件地址
整体采用内外环方式对四旋翼的位置和姿态进行控制
Simulink整体模型图
Matlab版本:R2022a 姿态控制效果
滚转角 ϕ \phi ϕ: 俯仰角 θ \theta

Pixhawk+PX4+VRPN +NOKOV无人机飞控平台动捕数据传输
NOKOV度量动作捕捉系统可以很好的适配PX4无人机飞控平台。进行数据通信的时候,使用SDK或者VRPN的方式都是可以的。本文演示NOKOV度量动作捕捉系统通过VRPN与PX4平台进行数据传输的方法。
一、硬件准备
1、准备无人机
这里准备的无人机,飞控版是Pixhaw…

【飞控调试】DJIF450机架+Pixhawk6c mini+v1.13.3固件+好盈Platinium 40A电调无人机调试
1 背景
由于使用了一种新的航电设备组合,在调试无人机起飞的时候遇到了之前没有遇到的问题。之前用的飞控(Pixhawk 6c)和电调(Hobbywing X-Rotor 40A),在QGC里按默认参数配置来基本就能平稳飞行࿰…
【产品应用】一体化伺服电机在系留无人机中的应用
一体化伺服电机是一种将电机、驱动器、编码器结合在一起的伺服系统,具有高精度控制、快速响应和高效运行等优点。系留无人机则是一种通过绳索或链条与地面设施连接的无人机,能够实现长时间的稳定悬停和空中作业。
01.设备简介 电源线牵引装置࿱…
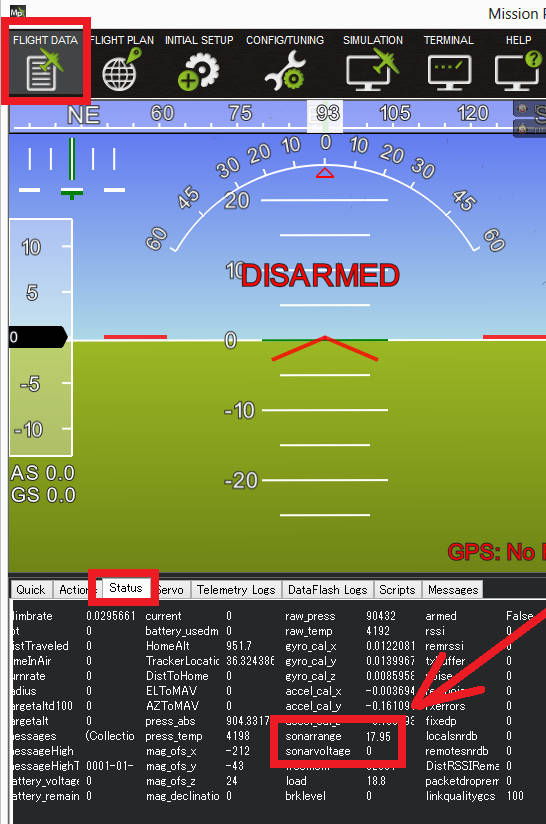
(1)(1.17) Maxbotix 模拟声纳
文章目录
前言
1 连接到Pixhawk
2 通过Mission Planner进行设置
3 测试传感器
4 参数说明 前言
XL-Maxbotix-EZ 系列模拟声纳(XL-MaxSonar-EZ0、EZ4 和 EZL0)是相对便宜的短距离(7m 至 10m)测距仪,主要设计用于室…

福德植保无人机:农业科技的新篇章
一、引言随着科技的不断发展,无人机技术在许多领域中都得到了广泛的应用。近年来,福德植保无人机在农业领域大放异彩,成为了现代化农业的重要一环。本篇文章将为您详细介绍福德植保无人机的优势、特点以及未来发展趋势。 二、福德植保无人机的…
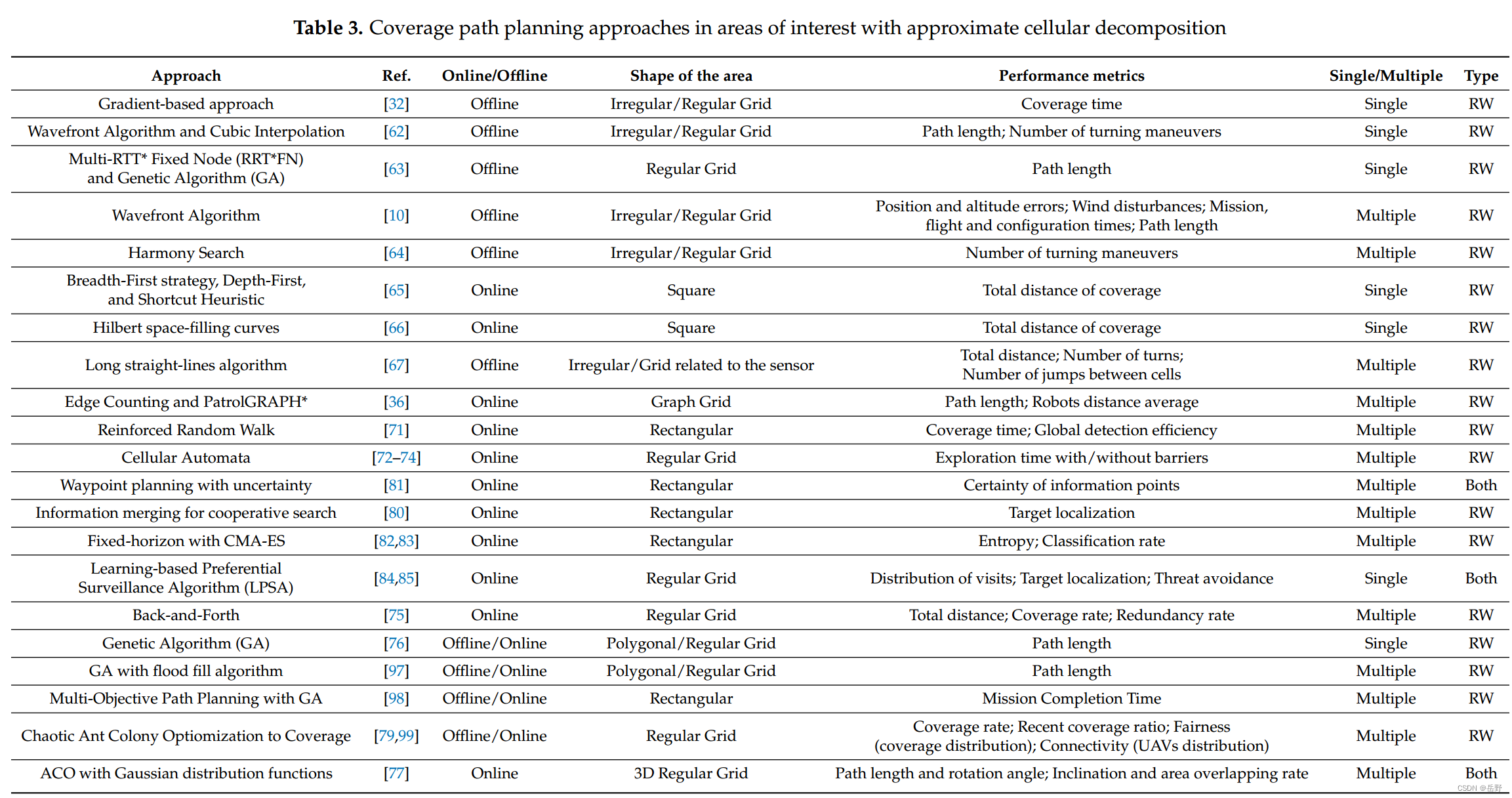
无人机覆盖路径规划综述
摘要:覆盖路径规划包括找到覆盖某个目标区域的每个点的路线。近年来,无人机已被应用于涉及地形覆盖的多个应用领域,如监视、智能农业、摄影测量、灾害管理、民事安全和野火跟踪等。本文旨在探索和分析文献中与覆盖路径规划问题中使用的不同方…
(六)五种最新算法(SWO、COA、LSO、GRO、LO)求解无人机路径规划MATLAB
一、五种算法(SWO、COA、LSO、GRO、LO)简介
1、蜘蛛蜂优化算法SWO
蜘蛛蜂优化算法(Spider wasp optimizer,SWO)由Mohamed Abdel-Basset等人于2023年提出,该算法模型雌性蜘蛛蜂的狩猎、筑巢和交配行为&…
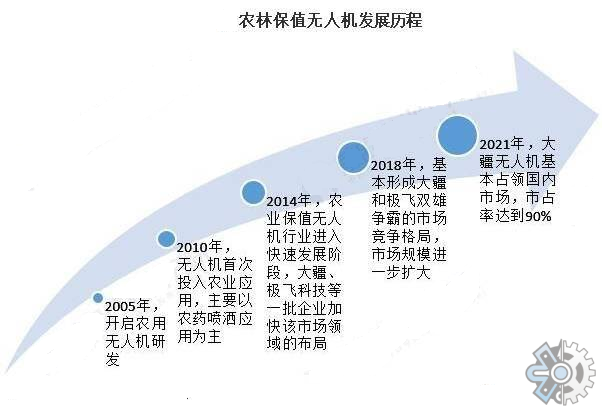
农业植保无人机行业研究:预计2025年市场规模可达115亿元
农业植保无人机行业市场投资前景现状如何?农业植保无人机市场,包括无人机自身技术、性能标准和植保标准。农业植保无人机应用植保机喷洒农药对我国而言,不仅具有很大的经济价值,还具有社会价值:农业植保机作业不仅有超高的工作效…

EasyCVR无人机推流+人数统计AI算法,助力公共场所人群密度管控
一、背景与需求
在公共场所和大型活动的管理中,人数统计和人群密度控制是非常重要的安全问题。传统的方法可能存在效率低下或准确度不足的情况,无法满足现代社会的需求。TSINGSEE青犀可以利用无人机推流AI人流量统计算法,基于计算机视觉技术…
【AI视野·今日Robot 机器人论文速览 第六十七期】Mon, 1 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Mon, 1 Jan 2024 Totally 16 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
MURP: Multi-Agent Ultra-Wideband Relative Pose Estimation with Constrained Communications in 3D Environments Authors A…
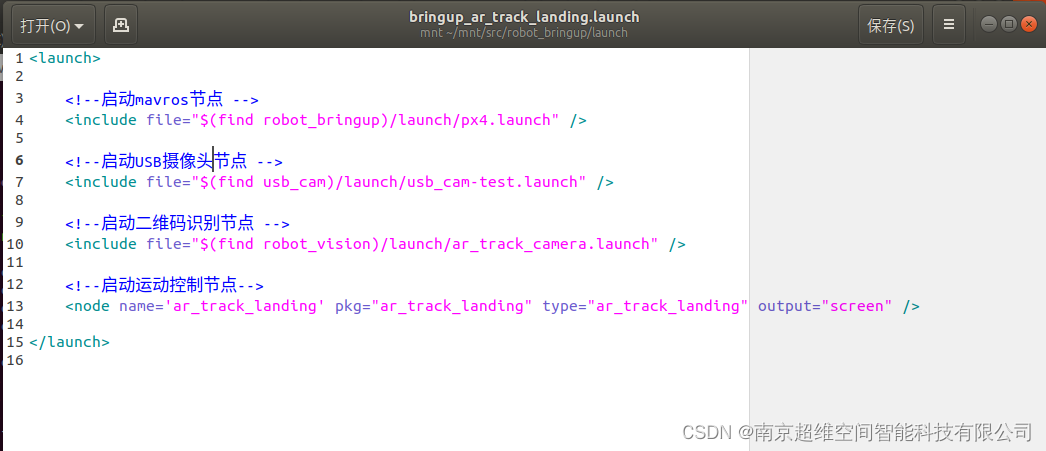
超维空间M1无人机使用说明书——52、ROS无人机二维码识别与降落
引言:使用二维码引导无人机实现精准降落,首先需要实现对二维码的识别和定位,可以参考博客的二维码识别和定位内容。本小节主要是通过获取拿到的二维码位置,控制无人机全向的移动和降落,分为两种,一种是无人…

『论文阅读|利用深度学习在热图像中实现无人机目标检测』
利用深度学习在热图像中实现无人机目标检测 摘要1 引言1.1 小物体检测1.2 物体检测中的模型组合1.3 热图像处理 2 提出的模型2.1 预测头数量2.2 骨干网络优化2.3 Transformer encoder 模块2.4 使用滑动窗口和注意力进行卷积2.5 训练和运行过程 3 结果3.1 数据集3.2 评估指标和平…

提升VR全景摄影画质的8个因素
如今VR全景拍摄的门槛已经很低,包括无人机、全景相机等都具有一键全景的功能。很多初次接触VR全景拍摄的朋友会发现同样的设备,为啥拍出来的效果就不如别人呢?
其实,要提升VR全景拍摄质量,只需要了解以下几个环节&…

无人机停机坪的主要功能有哪些
随着无人机行业领域的不断完善,无人机停机坪作为一项关键基础设施,正发挥着越来越重要的作用。无人机停机坪也叫无人机机巢、无人机机库、无人机机场。无人机停机坪不仅是无人机的“家”,更是其高效运行的关键环节。让我们一同探索无人机停机…
歌尔气压计SPA06-003在无人机和手表上的创新应用
随着科技的不断进步,各类智能设备的功能日益强大,其中气压计作为一种能够测量大气压力的传感器,已被广泛应用于多种领域。歌尔气压计以其高精度、低功耗的特点,在无人机和智能手表上的应用尤为突出,为这两个领域的产品…
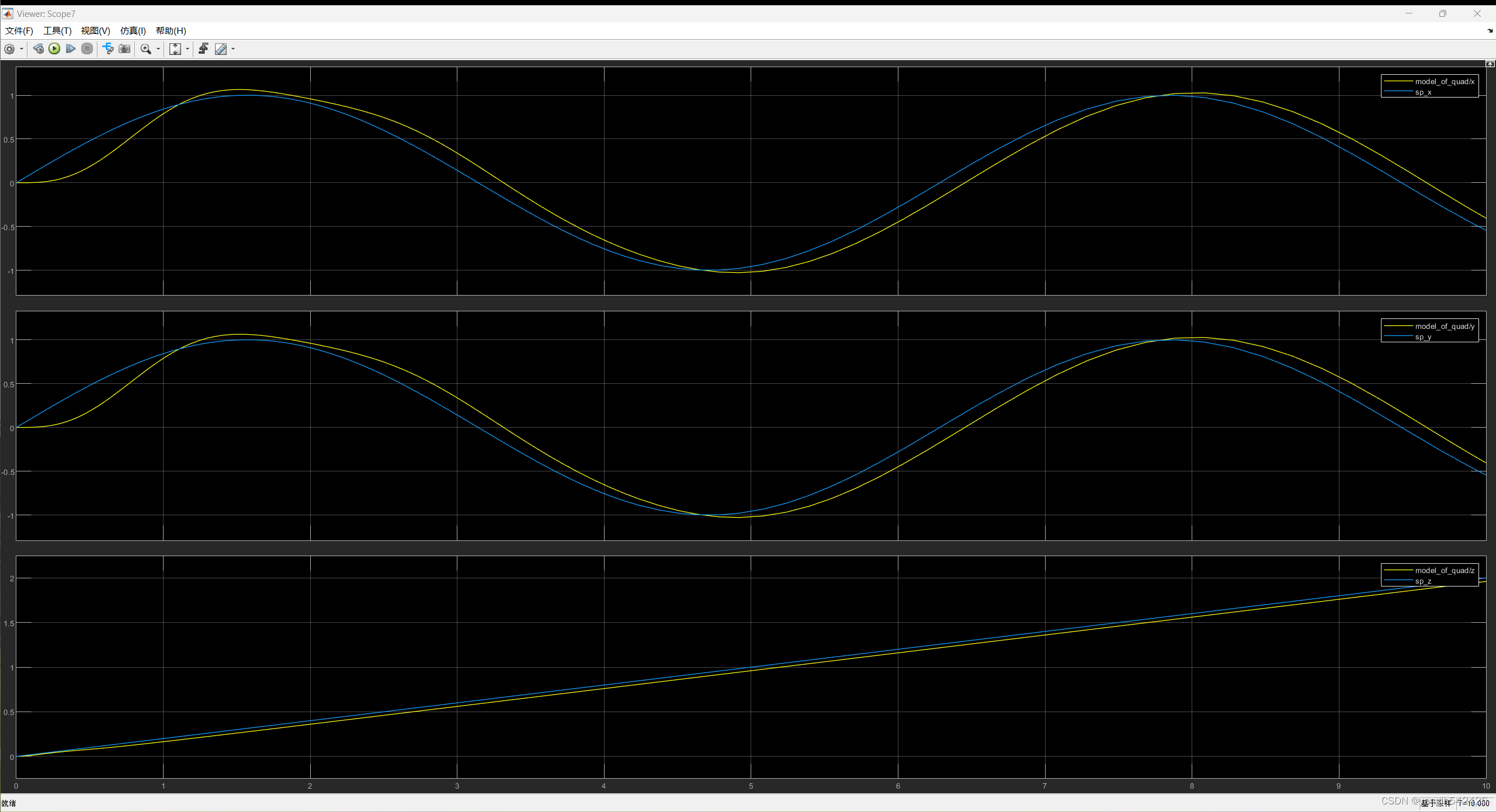
无人机|四旋翼运动动力学建模及位置控制仿真
目录 前言无人机模型推导动力学模型运动学模型 无人机模型仿真控制器设计 前言
本文将实现对无人机动力学以及运动学的公式推导完成建模,该模型以电机转速为输入,以无人机的状态量为输出。并在此基础上实现位置控制,以期望位置作为输入&…

【NR技术】 3GPP支持无人机的关键技术以及场景
1 背景 人们对使用蜂窝连接来支持无人机系统(UAS)的兴趣浓厚,3GPP生态系统为UAS的运行提供了极好的好处。无处不在的覆盖范围、高可靠性和QoS、强大的安全性和无缝移动性是支持UAS指挥和控制功能的关键因素。与此同时,监管机构正在调查安全和性能标准以及…
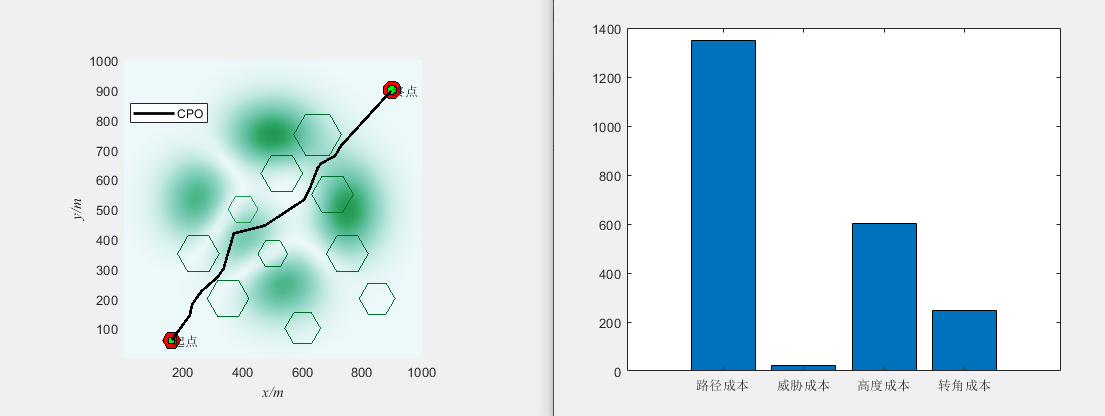
基于冠豪猪优化算法(Crested Porcupine Optimizer,CPO)的无人机三维路径规划(MATLAB)
一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行…
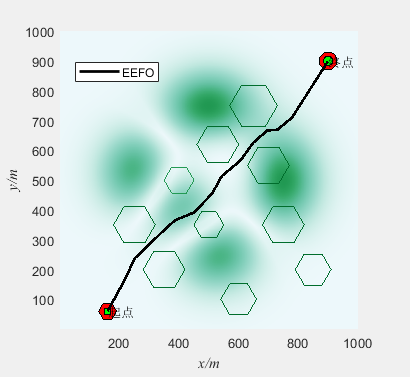
基于电鳗觅食优化算法(Electric eel foraging optimization,EEFO)的无人机三维路径规划(提供MATLAB代码)
一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行…

巨型犰狳优化算法(Giant Armadillo Optimization,GAO)的无人机三维路径规划(MATLAB)
一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。 二、算法介…

角蜥优化算法 (Horned Lizard Optimization Algorithm ,HLOA)求解无人机路径优化
一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。 二、算法介…
美洲狮优化算法(Puma Optimizar Algorithm ,POA)求解机器人栅格地图最短路径规划(提供MATLAB代码)
一、美洲狮优化算法
美洲狮优化算法(Puma Optimizar Algorithm ,POA)由Benyamin Abdollahzadeh等人于2024年提出,其灵感来自美洲狮的智慧和生活。在该算法中,在探索和开发的每个阶段都提出了独特而强大的机制…
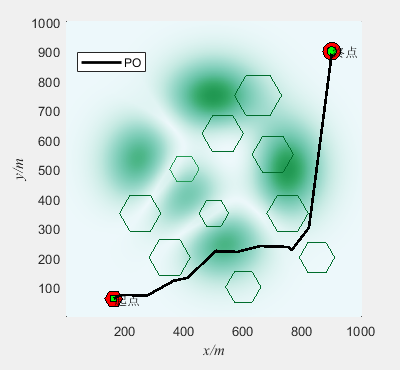
基于鹦鹉优化算法(Parrot optimizer,PO)的无人机三维路径规划(提供MATLAB代码)
一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行…
![[DroneCAN]CAN-Convertor控制CAN电调电机](https://img-blog.csdnimg.cn/direct/e36b8708d49d40f5b6d48950a694f640.png)
[DroneCAN]CAN-Convertor控制CAN电调电机
简介
CAN电调电机是一类通过CAN协议控制转速的电调电机,和传统的PWM电调电机不同在于,CAN协议有网络性和抗干扰性,因此其性能比PWM更好,占用的端口数也会更少。在apm或者px4等基于dronecan的飞控来说,想要控制第三方的…
(2)(2.10) LTM telemetry
文章目录
前言
1 协议概述
2 配置
3 带FPV视频发射器的使用示例
4 使用TCM3105的FSK调制解调器示例 前言
轻量级 TeleMetry 协议 (LTM) 是一种单向通信协议(从飞行器下行的数据链路),可让你以低带宽/低波特率(通常为 2400 波…

航拍无人机技术,航拍无人机方案详解,无人机摄影技术
航拍无人机是利用遥控技术和摄像设备,在空中进行拍摄和录像的无人机。这种无人机通常具有高清摄像设备、图像传输设备、GPS定位系统、智能控制系统等,可以轻松实现各种拍摄角度和高度,广泛应用于影视制作、旅游景区航拍、城市规划、环保监测等…

无人机快递(物流)技术方案,无人机快递(物流)基础知识
无人机快递技术是一种利用无人机进行快递配送的先进技术。通过利用无人机,快递企业能够在偏远地区或难以通行的地区提供配送服务,同时提高配送效率并降低人力成本。 无人机基本情况
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的…

仿真科普|CAE技术赋能无人机 低空经济蓄势起飞
喝一杯无人机送来的现磨热咖啡;在拥堵的早高峰打个“空中的士”上班;乘坐水陆两栖飞机来一场“陆海空”立体式观光……曾经只出现在科幻片里的5D城市魔幻场景,正逐渐走进现实。而推动上述场景实现的,就是近年来越来越热的“低空经…
植保无人机如何提高作业效率?
植保无人机可以通过多种方式提高作业效率,主要包括以下几个方面:
喷洒效率高:植保无人机采用喷雾喷洒方式,可以快速均匀地将农药、肥料等喷洒到农田中,避免了传统人工喷洒效率低下的问题,大大提高了作业效…
11.16 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招|三一集团2024校招精选岗位补录,快上车!
校招|三一集团2024校招精选岗位补录,快上车! 2、校招丨寒武纪24届校招…

yolov5旋转目标检测-遥感图像检测-无人机旋转目标检测-附代码和原理
综述
为了解决旋转目标检测问题,研究者们提出了多种方法和算法。以下是一些常见的旋转目标检测方法:
基于滑动窗口的方法:在图像上以不同的尺度和角度滑动窗口,通过分类器判断窗口中是否存在目标。这种方法简单直观,…

【PX4-AutoPilot教程-TIPS】PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法
PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法 问题描述解决方法 问题描述
无人机在Gazebo中飞行时,无人机始终处于画面中央,会带着视角乱晃,在Gazebo中进行任何操作视角都无法固定。 观察Gazebo左侧Wo…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…

无人机三维建模过程中注意事项
无人机三维建模是指利用无人机技术进行三维建模,该方法通过无人机搭载的多种传感器,如摄像头、激光扫描仪等,获取建筑物的多角度影像数据,然后利用计算机视觉技术和三维重建算法,将这些影像数据转化为高精度的三维模型…
Unbuntu20.04 git push和pull相关问题
文章目录 Unbuntu20.04 git push和pull使用1.下载[Git工具包](https://git-scm.com/downloads)2.建立本地仓库3.将本地仓库与github远程仓库关联4.将本地仓库文件上传到github远程仓…
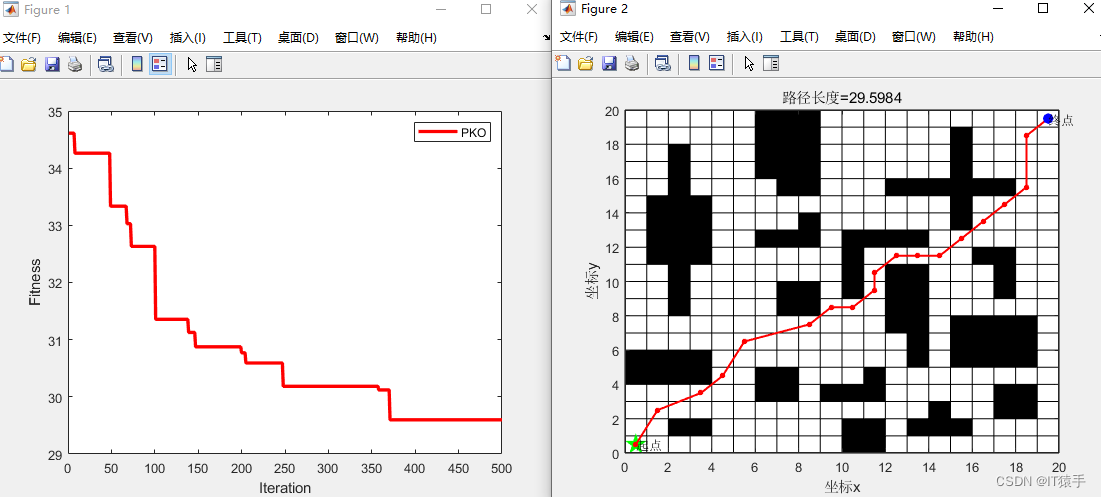
机器人路径规划:基于斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO)的机器人路径规划(提供MATLAB代码)
一、机器人路径规划介绍
移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或…
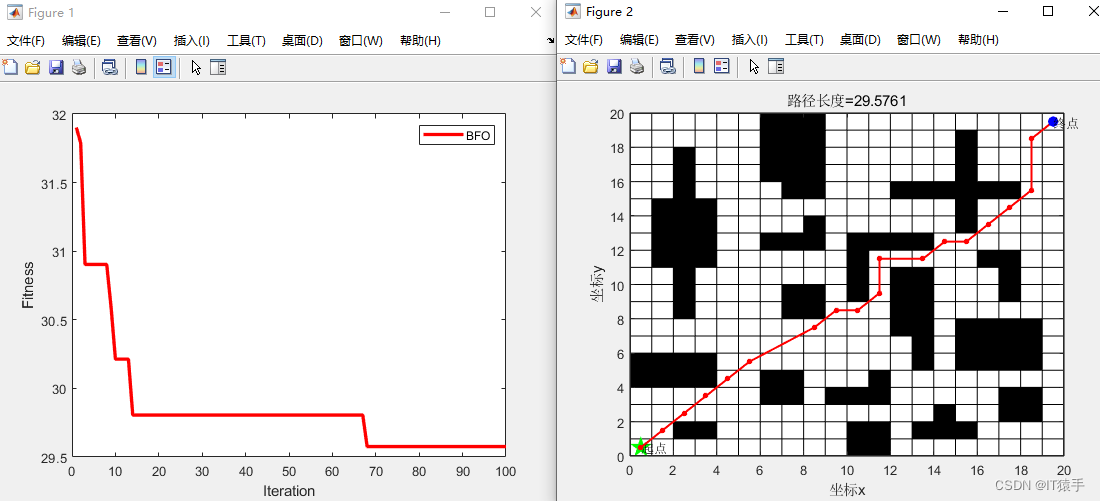
机器人路径规划:基于鳑鲏鱼优化算法(BFO)的机器人路径规划(提供MATLAB代码)
一、机器人路径规划介绍
移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或…
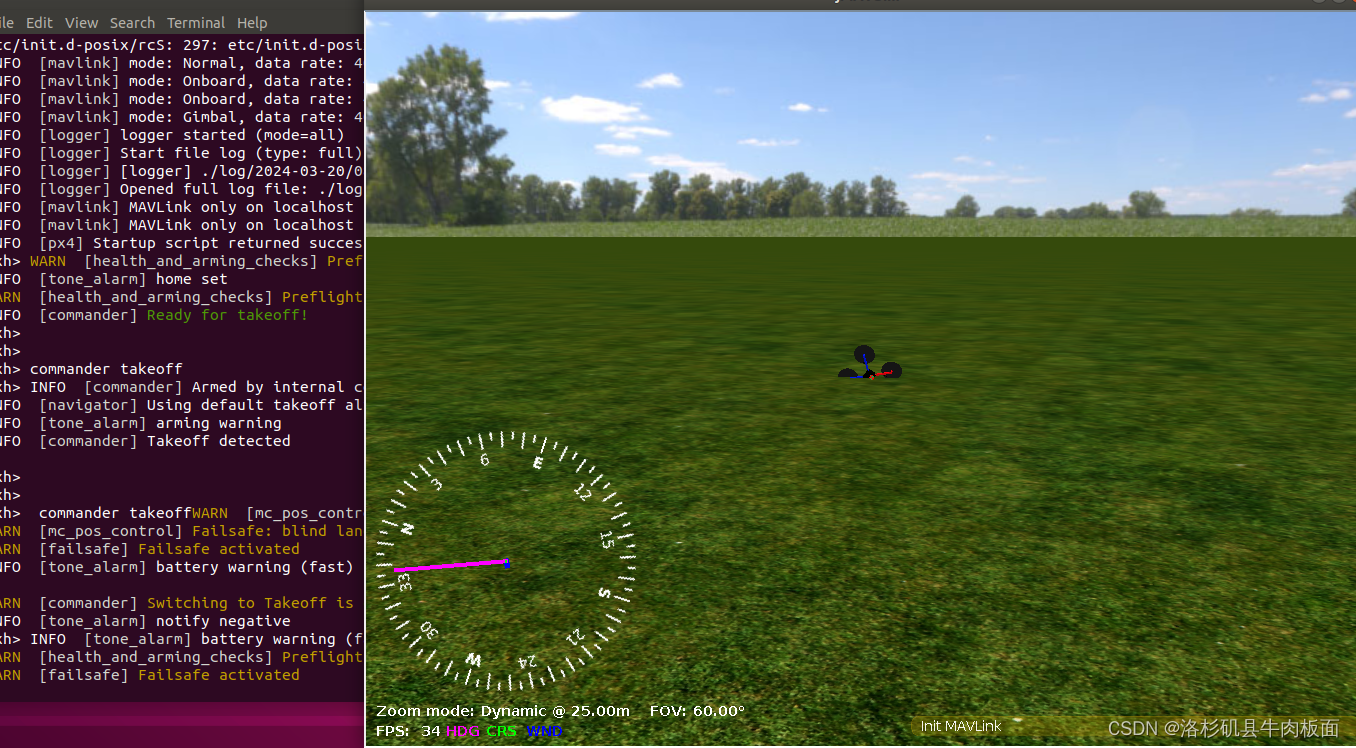
无人机/飞控--ArduPilot、PX4学习记录(2)
这是一篇碎碎念,零零碎碎的记录了环境配置过程,仅供本人记录学习历程和参考。(记录的挺乱的,但是文章链接里的博客写的是真好) 本章主要完成的目标: 安装PX4 并 成功运行出3D无人机界面。 参考文章:
搭建PX4环境&…
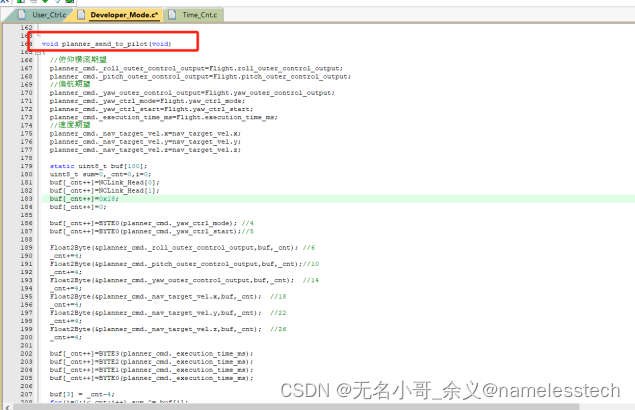
使用通用MCU实现无人机飞行任务的快速二次开发
使用通用MCU实现无人机飞行任务的快速二次开发
---TIDronePilot外部控制offboard模式介绍 无名小哥 2024年1月1日
传统飞控二次开发方法和主要存在的问题简介
通过对前面几讲中《零基础竞赛无人机积木式编程指南》系列开发教程的学习可知,在以往TI电赛真题的学习…

聊一聊EGO-Planner膨胀系数的大小对无人机避障飞行的影响
EGO-Planner简介
EGO-Planner作为业界知名的无人机轨迹规划算法,其优势在于能够在复杂环境中快速规划出安全、平滑且动态可行的飞行轨迹。在这个算法中,膨胀系数发挥着关键作用。它通过扩大障碍物的感知范围,提供额外的安全边距,…
【Python入门教程】读取图片信息(经纬度、偏转角、无人机POS数据、大疆影像等)
通常读取图片的属性信息(如经纬度、拍摄时间、IMU数据等)都是通过exifread库进行读取,但是有些图片用这个库读取的效果不好。所以今天我就和大家分享一下如何使用Python读取图片属性信息的三种方法。 1 GDAL读取 GDAL库是用来处理卫星影像的库…

发现独角兽 | B轮拿下2.5亿,“小巨人”卓翼智能何以出圈?
2024年伊始,无人机领域一笔大融资诞生。
近日,智能无人系统解决方案企业卓翼智能宣布完成2.5亿元B轮融资,这是近年来业内完成的较大规模融资,并且获得了多位产业资本的支持,这在业内也十分罕见。
在卓翼智能的背后&a…

垂起固定翼无人机基础知识,垂起固定翼无人机应用前景,垂起固定翼无人机优缺点分析
无人机定义与类型
无人机,也称为无人驾驶飞行器,是一种无需人工直接操作的航空器。根据其用途、设计及技术特点,可以分为多种类型。垂起固定翼无人机是其中的一种,它具有垂直起降的能力并采用固定翼设计以提高飞行效率和稳定性。…

上海雏鸟科技无人机灯光秀跨年表演点亮三国五地夜空
2023年12月31日晚,五场别开生面的无人机灯光秀跨年表演在新加坡圣淘沙、印尼雅加达、中国江苏无锡、浙江衢州、陕西西安等五地同步举行。据悉,这5场表演背后均出自上海的一家无人机企业之手——上海雏鸟科技。 在新加坡圣淘沙西乐索海滩,500架…
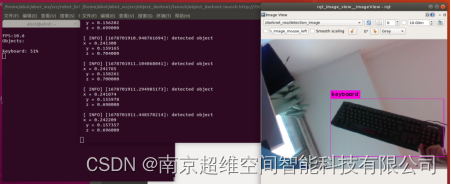
超维空间M1无人机使用说明书——41、ROS无人机使用yolo进行物体识别
引言:用于M1无人机使用的18.04系统,采用的opencv3.4.5版本,因此M1无人机只提供了基于yolov3和yolov4版本的darknet_ros功能包进行物体识别,识别效果足够满足日常的物体识别使用,如果需要更高版本的yolov7或者yolov8&am…
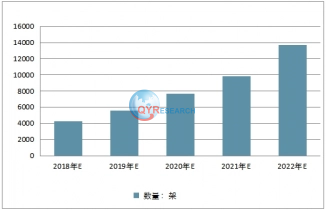
无人机发动机,预计到2025年将保持相对稳定
随着无人机技术的不断发展,无人机应用领域越来越广泛,市场需求也不断扩大。而无人机发动机是无人机的核心部件之一,市场前景也十分广阔。全球市场分析: 目前,全球无人机发动机市场主要分为四类:燃气涡轮发动…

【GlobalMapper精品教程】073:像素到点(Pixels-to-Points)从无人机图像轻松生成点云
文章目录 一、工具介绍二、生成点云三、生成正射四、生成3D模型五、注意事项一、工具介绍
Global Mapper v19引入的新的像素到点工具使用摄影测量原理,从重叠图像生成高密度点云、正射影像及三维模型。它使LiDAR模块成为已经功能很强大的的必备Global Mapper扩展功能。
打开…

0基础学习VR全景平台篇第136篇:720VR全景,认识无人机
上课!全体起立~
大家好,欢迎观看蛙色官方系列全景摄影课程!
无人驾驶飞行器,简称“无人机”,英文缩写为“UAV”。是利用无线电控制设备和自备程序控制操纵的不载人飞机。
(一)无人机介绍
较…
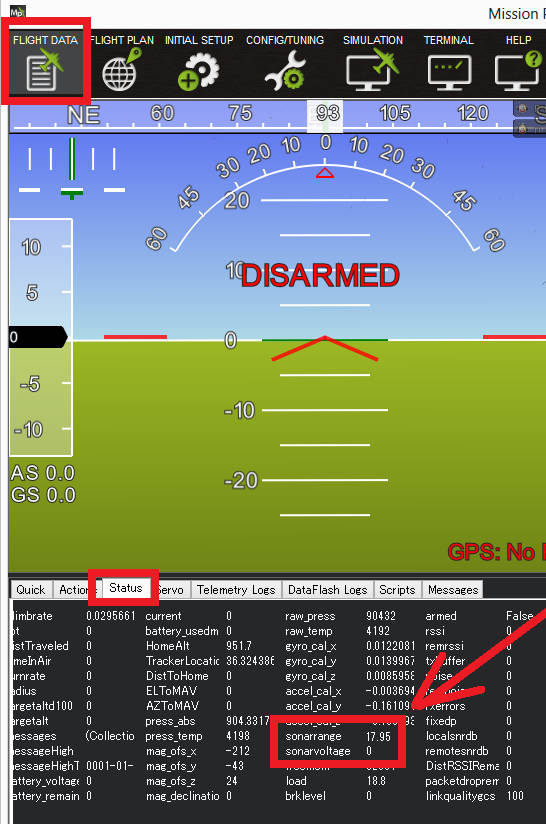
(4)(4.5) Underwater Sonar (Analog)
文章目录
前言
1 推荐硬件
2 连接和配置
3 参数说明 前言
本页详细介绍了低成本模拟水下声纳(又称"探鱼器")和数字转换器的设置,数字转换器可将模拟读数转换成 NMEA 0183,供 ardupilot 读取。这种设置可以测量船下…
Roscpp中构造函数与析构函数及在无人机串口通信应用
1. 概念辨析
构造函数
作用:初始化,在创建对象时会自动调用,有点像Python中的 __init__ 方法 特点:命名为class命名,在public中声明。
析构函数
作用:完成释放前的一些清理工作。 特点:命名…

无人机详细操作方法:
不同型号的无人机操作方法会有所区别,以云卓无人机为例,为你介绍其操作方法:
1. 打开机臂,安装护架、红外避障头,盖上后盖;
2. 打开飞机和遥控器,将两个油门的外八节进行校准;
3.…
DJI无人机二次开发:模拟航线飞行
1.下载大疆行业调参软件(大疆官网下载,有mac系统和win系统)。 2.安装软件以后用数据线连接电脑和无人机 3.识别无人机点击进去进入模拟器设置和遥控器相同的经纬坐标 4.在遥控器上载入航线 5.开始执行以后在上云api可以看到无人机在地图上移动…

无人机在行业里的应用举例
无人机,这个曾经被认为是科幻玩具的东西,如今已经在各个行业中大放异彩!你知道吗?在农业、环保、物流、测绘等领域,无人机都成为了不可或缺的工具。
在农业领域,无人机可以进行高效的作物监测和喷洒农药&a…
(02)Cartographer源码无死角解析-(26) 阻塞队列BlockingQueue(),与OrderedMultiQueue成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

pixhawk2.4.8-地面站配置-APM固件
目录一、硬件准备二、APM固件、MP地面站下载三、地面站配置1 刷固件2 机架选择3 加速度计校准4 指南针校准5 遥控器校准6 飞行模式7 紧急断电&无头模式8 基础参数设置9 电流计校准10 电调校准11 起飞前检查(每一项都非常重要)12 飞行经验四、遇到的问…

无人机在化工消防救援中的应用,消防无人机应用场景分析
火灾对社会环境具有较大影响,因此需要重视消防灭火救援工作,注重现代化技术的运用,将无人机应用到救援过程并保障其应用质量。无人机是一项重要技术,便于消防灭火救援操作,使救援过程灵活展开,排除不利影响…

无人机动力系统高倍率锂聚合物电池介绍,无人机锂电池使用与保养,无人机飞行控制动力源详解
无人机电池使用及保养
电池是无人机飞行的动力来源,也是一个消耗品,对电池充分了解,采取正确的使用方法,妥善进行维护保养将有助于提高飞行的安全性、延长电池的使用寿命。以下将详细对电池的使用和管理进行讲解。 高倍率锂聚合物电池的含义…

无人机飞控系统飞行原理介绍,旋翼无人机飞行控制技术详解
旋翼飞行器是通过调节多个电机转速来改变螺旋桨转速,实现升力的变化,进而达到飞行姿态控制的目的。
多旋翼飞行原理详解
以四旋翼飞行器为例,飞行原理如下图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋…

无人机基本知识,无人机遥控器功能详解与调试方法
无人机作为一种新兴的飞行器,近年来在各个领域得到了广泛的应用。而无人机遥控器则是控制无人机飞行的重要工具。 无人机遥控器是一种无线设备,通过它来远程控制无人机的飞行。遥控器通常包括一个或多个摇杆,用于控制无人机的各种动作&#x…

FPGA实现ISP用于无人车、无人机配送的方案调研
查到一个always 奥唯思公司做的用FPGA实现ISP的方案,采用易灵思钛金16nm的FPGA Ti60F225,通过MIPI CSI RX采集图像传感器的数据,在FPGA内部经过一系列复杂的ISP运算后,再通过MIPI CSI TX将图像数据发送给后端。
一套完整的ISP&a…

强化学习应用(七):基于Q-learning的无人机物流路径规划研究(提供Python代码)
一、Q-learning简介
Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的问题。它通过学习一个价值函数来指导智能体在环境中做出决策,以最大化累积奖励。
Q-learning算法的核心思想是通过不断更新一个称为Q值的…
超维空间S2无人机使用说明书——61、ROS无人机4G远程控制
4G模块使用说明
引言:为了实现对无人机的远程控制,我们采用了4G通信的方案,该方案需要硬件以及相关软件的支持。4G通信是可选择功能,请确认无人机型号是否选配了4G通信。
一、4G通信方案
我们的4G通信主要通过两种方式实现&…

无人机测绘助力实现高效、安全的城市规划
随着城市化进程的不断加快,城市规划显得尤为重要。而无人机测绘技术作为一种创新的工具,为城市规划提供了更加高效、安全的解决方案。它通过快速、精确的数据采集和分析,为行业提供有力的决策支持,助力城市规划的现代化和可持续发…
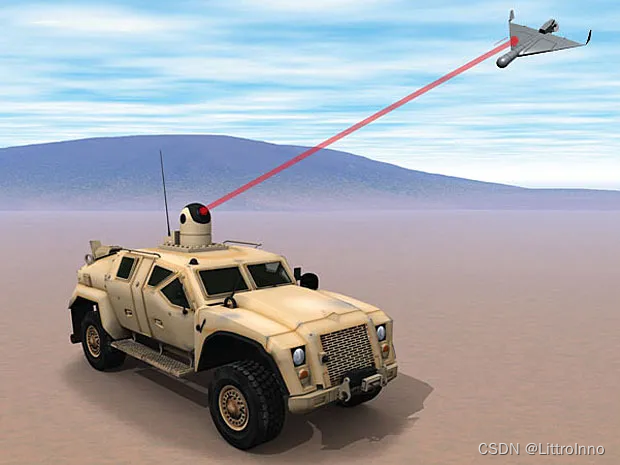
激光无人机打击系统——光束控制和指向系统
激光无人机(UAV)打击系统中的光束控制和指向系统通常包括以下几个关键组件和技术: 激光发射器:这是系统的核心,负责生成高能量的激光束。常用的激光类型包括固体激光器、化学激光器、光纤激光器等,选择取决…
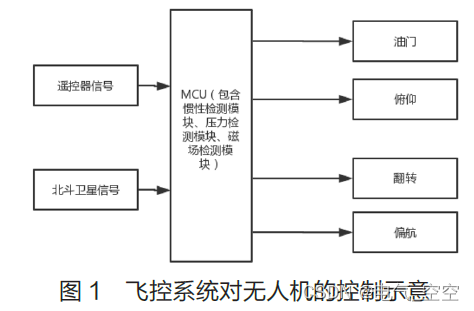
基于无人机的消防灭火系统设计
摘要:人类社会的进步,使火灾变得更加频繁且越来越复杂,随着这些年无人机技术的发展,将无人机技术融入消防灭火逐渐变成必然。消防救援采用无人机主要有以下几点原因:一、对火场及火场周围环境信息十分匮乏,…
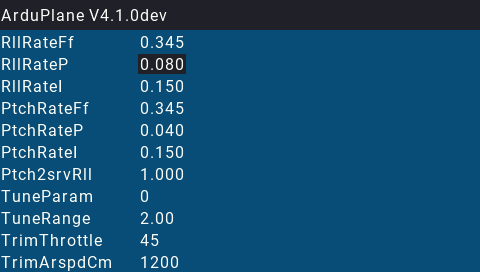
(2)(2.4) CRSF/ELRS Telemetry
文章目录
前言
1 ArduPilot 参数编辑器 前言
!Note
ELRS(ExpressLRS)遥控系统使用穿越火线协议,连接方式类似。不过,它不像穿越火线那样提供双向遥测。 TBS CRSF 接收机与 ArduPilot 的接口中包含遥测和遥控信息。…

多旋翼无人机飞行控制详解,四旋翼无人机飞控原理深入解析
在四旋翼无人机中,相邻的两个螺旋桨旋转方向是相反的。如图所示,三角形红箭头表示飞机的机头朝向,螺旋桨M1、M3的旋转方向为逆时针,螺旋桨M2、M4的旋转方向为顺时针。当飞行时,M2、M4所产生的逆时针反作用力࿰…
01.08 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 航天电器2024校园招聘!
校招 | 航天电器2024校园招聘! 2、实习 | 一汽-大众2024冬季实习生招聘正式启动
实习 | 一汽-大众2024冬季实习生招聘正式启动 …

反无人机系统技术分析,无人机反制技术理论基础,无人机技术详解
近年来,经过大疆、parrot、3d robotics等公司不断的努力,具有强大功能的消费级无人机价格不断降低,操作简便性不断提高,无人机正快速地从尖端的军用设备转入大众市场,成为普通民众手中的玩具。 然而,随着消…

无人机地面站技术,无人机地面站理论基础详解
地面站作为整个无人机系统的作战指挥中心,其控制内容包括:飞行器的飞行过程,飞行航迹, 有效载荷的任务功能,通讯链路的正常工作,以及 飞行器的发射和回收。
无人机地面站总述
地面站作为整个无人机系统的作战指挥中心…
![[GDMEC-无人机遥感研究小组]无人机遥感小组-000-数据集制备](https://img-blog.csdnimg.cn/direct/489ac46ae9c04349ab6ced746b4534a7.png#pic_center)
[GDMEC-无人机遥感研究小组]无人机遥感小组-000-数据集制备
基于labelme的无人机语义分割数据集制备 文章目录 基于labelme的无人机语义分割数据集制备1. 数据获取2. 安装labelme3.利用labelme进行标注 1. 数据获取
数据集制备需要利用无人机飞行并采集标注。使用录制模式,镜头垂直向下进行拍摄,得到DJI_XXXX.MP4…
无人机航迹规划(六):七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介
1、蜣螂优化算法DBO
蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…
【美团】无人机-大数据开发工程师
更新时间:2024/01/29 工作地点:北京市 事业群:到家事业群 工作经验:3年 部门介绍
为了更好地提升城市即时配送的效率与体验,美团于2017年启动了无人机配送服务的探索,通过科技创新推动履约工具变革&#x…
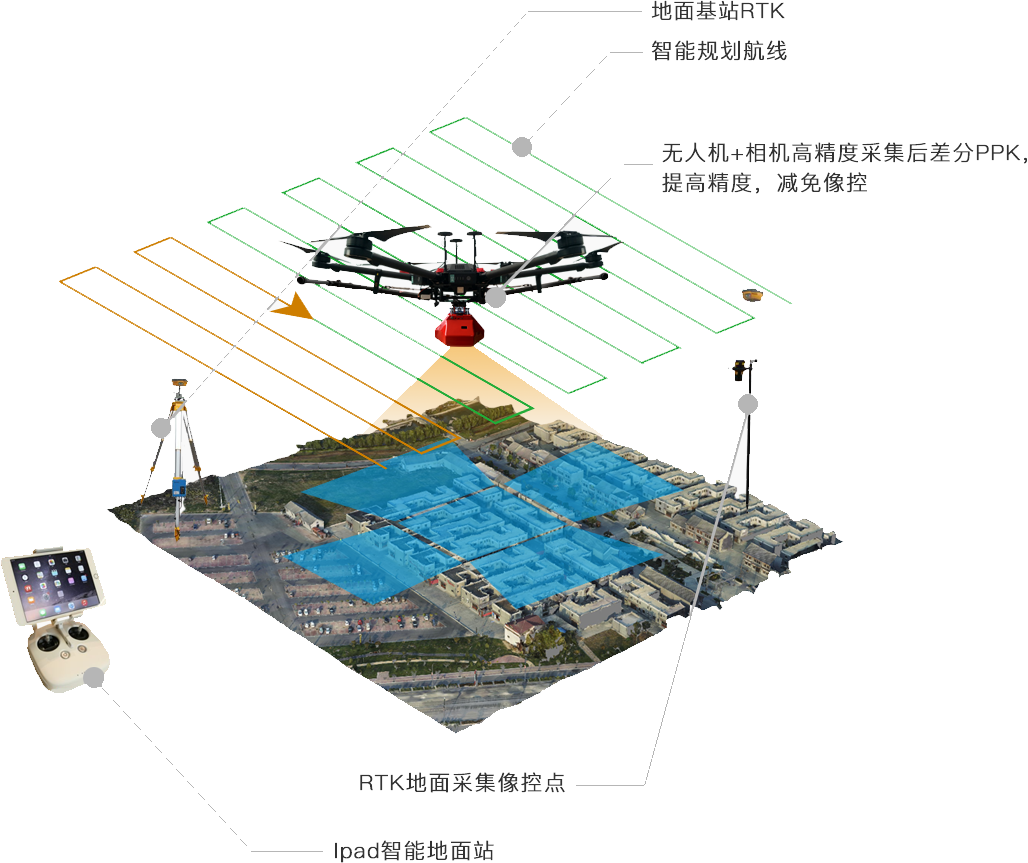
基于YOLOv的目标追踪与无人机前端查看系统开发
一、背景与简介 随着无人机技术的快速发展,目标追踪成为无人机应用中的重要功能之一。YOLOv作为一种高效的目标检测算法,同样适用于目标追踪任务。通过集成YOLOv模型,我们可以构建一个无人机前端查看系统,实现实时目标追踪和可视化…
仿生蝴蝶制作——蝴蝶翅膀制作
前言
上一次已经设计好了的翅膀图纸 接下来就是根据这个图纸来制作翅膀。 过程中其实可以不用尺子准确测量,直接用碳纤维棒比着剪下来就好了,然后把减下来的一截比着剪下另一只翅膀需要的材料。因为左右两只翅膀差别不能太大,所以这样是最好…
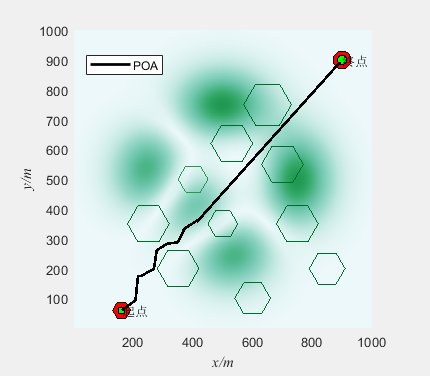
基于美洲狮优化算法(Puma Optimizar Algorithm ,POA)的无人机三维路径规划(提供MATLAB代码)
一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行…

大载重无人机基础技术,研发一款50KG负重六旋翼无人机技术及成本分析
六旋翼无人机是一种多旋翼无人机,具有六个旋翼,通常呈“X”形布局。它采用电动串列式结构,具有垂直起降、悬停、前飞、后飞、侧飞、俯仰、翻滚等多种飞行动作的能力。六旋翼无人机通常被用于航拍、农业植保、环境监测、地形测绘等领域。 六旋…
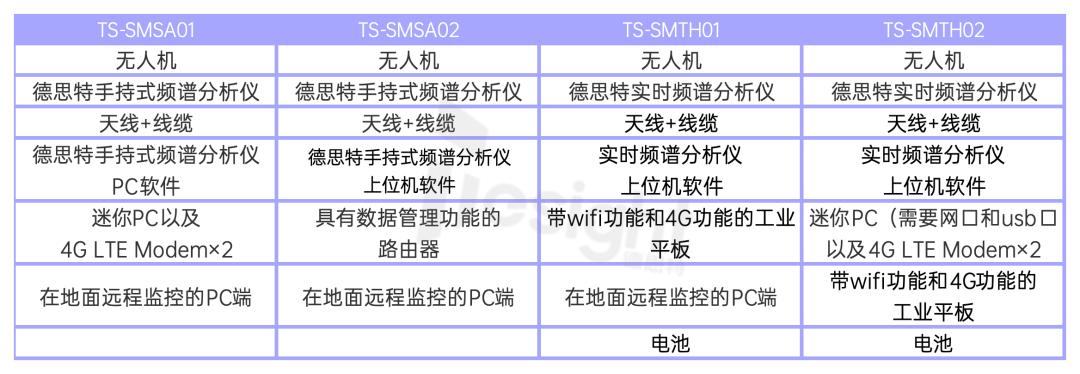
无人机机载频谱监测方案助力空中频谱监测与干扰排查
作者介绍 一、方案背景
频谱资源是通信最重要的资产之一,随着宽带无线业务的快速增长,对频率资源的需求大幅增加。未来频率资源的供需矛盾将非常突出,空中频谱环境也会越来越复杂,对于工程师来说,在复杂的电磁环境条件…

【NR技术】 3GPP支持无人机服务的关键性能指标
1 性能指标概述 5G系统传输的数据包括安装在无人机上的硬件设备(如摄像头)收集的数据,例如图片、视频和文件。也可以传输一些软件计算或统计数据,例如无人机管理数据。5G系统传输的业务控制数据可基于应用触发,如无人机上设备的开关、旋转、升…
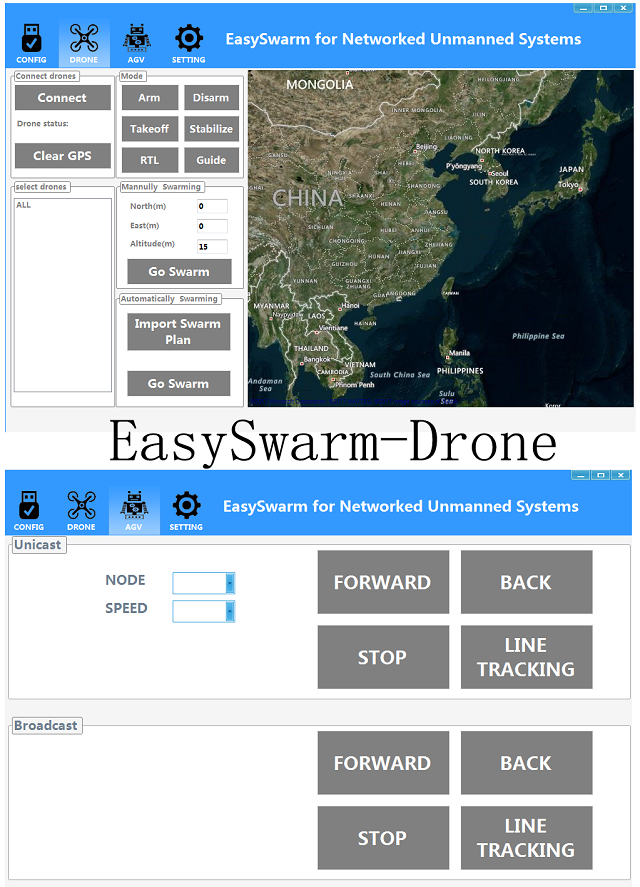
(2)(2.12) Robsense SwarmLink
文章目录
前言
1 规格(根据制造商提供)
2 EasySwarm
3 参数说明 前言
Robsense SwarmLink 遥测无线电可将多架无人机连接到一个地面站,而无需在地面站一侧安装多个无线电(即创建一个网状网络)。此外,还…
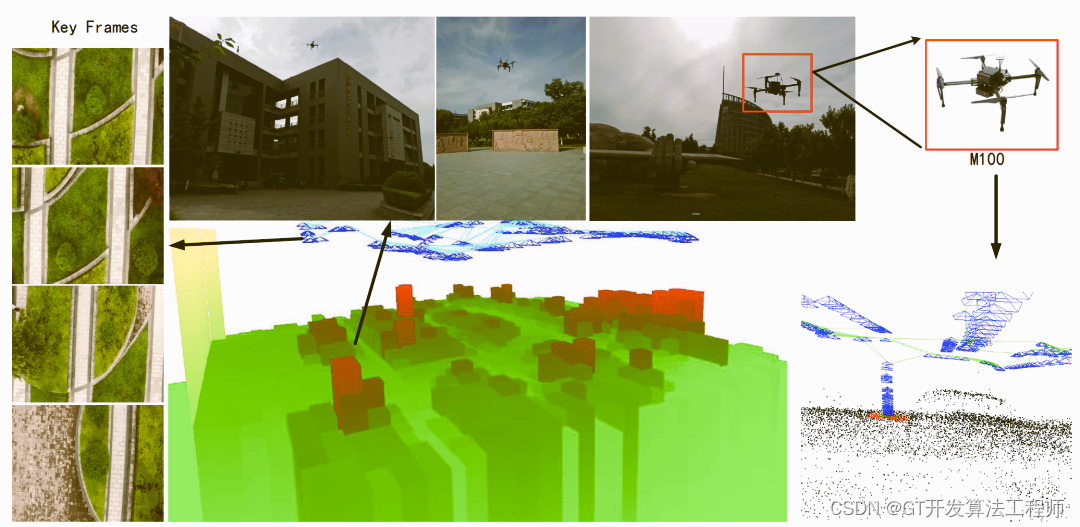
无人机自动返航算法部署与飞行控制实践
一、环境准备 无人机硬件:确保你有一台支持自定义飞行控制的无人机,通常配备有Pixhawk或其他类似的飞行控制器。 地面站软件:安装如Mission Planner或QGroundControl等地面站软件,用于配置无人机参数和上传飞行控制代码。 编程环…
无人机是如何进行开发的
无人机开发涉及多个方面,包括硬件设计、软件开发、飞行控制算法等。以下是一个简化的无人机方案开发流程:
需求分析:明确无人机的功能、性能要求和应用场景。硬件选择:选择合适的飞控系统、传感器(如陀螺仪、加速度计…

机器人路径规划:基于D*Lite的机器人路径规划(提供Python代码)
一、D*Lite简介
D* Lite算法是栅格模型下针对动态环境的路径规划算法, 其将LPA*算法的思想运用于动态环境下, 使得移动机器人在未知环境下可以快速重规划。D* Lite算法的优势在于, 当环境中出现新的未知障碍物时, 可以快速更新该障碍物周边节点的信息, 并将由此而导致不连续的…
路径优化算法 | 基于视觉 SLAM 算法的粒子群优化无人机路径规划附matlab
概述
基于视觉的同步定位与地图构建(SLAM)算法与粒子群优化(PSO)算法在无人机路径规划中的结合是一个复杂但富有挑战性的问题。视觉SLAM算法用于实时定位和地图构建,而PSO算法则用于优化无人机的飞行路径。以下是一个简化的步骤说明,以及如何在MATLAB中复现这个过程。
…

【3GPP 无人机】 3GPP支持无人机的架构模型以及准则
1 概述 无人机是当前热门的产品,似乎各行各业都可以应用无人机来做一些事情;比如航拍、送快递、农业应用、应急通信、军事等等。3GPP组织最近几年也在密集讨论无人机产品与商用通信系统的融合问题,让我们一起来看看它是怎么定义和使用无人机的…

无人机摄影测量---倾斜摄影测量原理与关键技术
《无人机航空摄影测量精品教程》专栏:无人机航测外业作业流程(像控点布设、航线规划、仿地飞行、航拍)和内业数据处理软件(Pix4d、CC、EPS、PhotoScan、Globalmapper)像控点权重调配、空三加密、DOM、DSM、DEM…
01.13 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 诺瓦星云2024届春招提前启动!
校招 | 诺瓦星云2024届春招提前启动! 2、校招 | 中国电信云计算研究院2024届校园招聘正式启动!
校招 | 中国电…
北方天途航空——无人船、植保无人机及VR教学系统
4月29日,2019中国北京世界园艺博览会在北京的延庆区正式拉开大幕,这一场A1类的世界园艺博览会吸引了110个国家以及国际组织正式确认参展。北方天途航空技术发展(北京)有限公司受邀参与了此次世园会,并在博览会上应用无人船、植保无人机及VR虚…
移动视频-智能安全帽-5G/4G记录仪-布控球-无人机5G/4G回传产品及平台常用技术支持资料汇总
视频融合通信平台相关文档
基于webRTC构建的新一代视频融合可视指挥调度平台smarteye server WEB SDK restful接口文档,https://smarteye.besovideo.com/doc/
新一代smarteye配套的WEB融合可视指挥调度平台软件常用功能,https://www.besovideo.com/d…
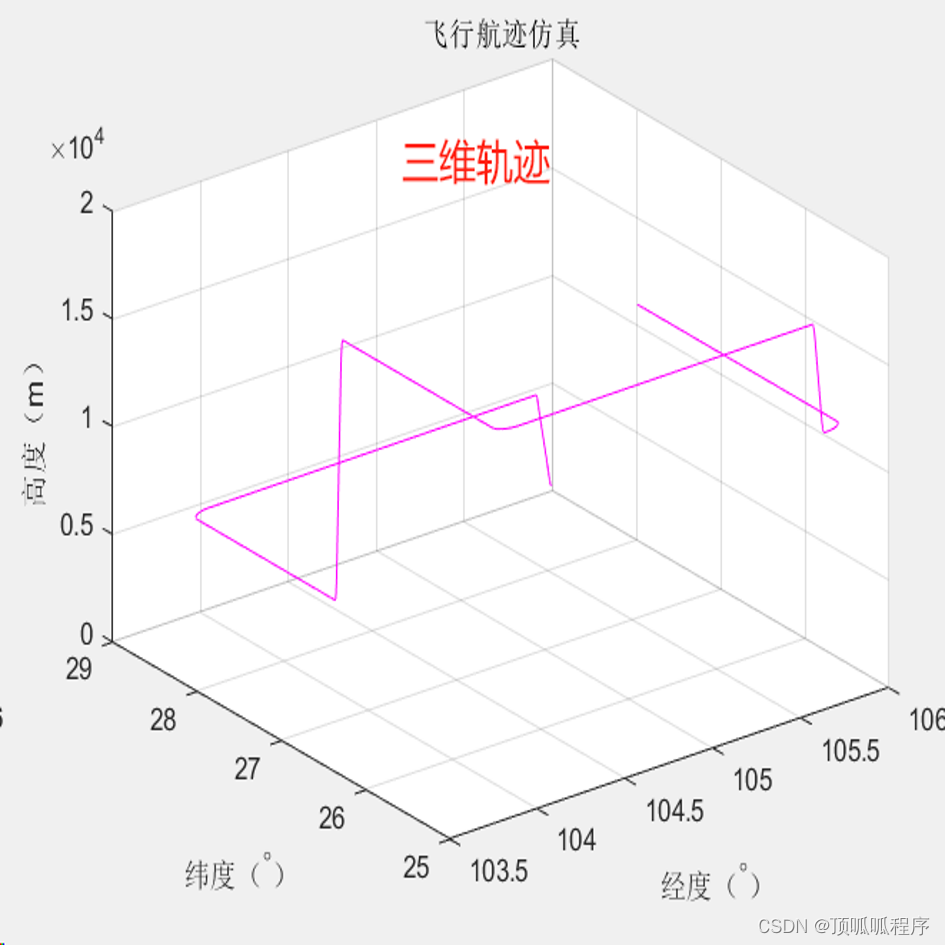
206基于matlab的无人机航迹规划(UAV track plannin)
基于matlab的无人机航迹规划(UAV track plannin)。输入输出参数包括 横滚、俯仰、航向角(单位:度);横滚速率、俯仰速率、航向角速率(单位:度/秒);飞机运动速度——X右翼、…
无人机两次飞行的图像数据配准与几何校正方法研究
标题: 无人机两次飞行的图像数据配准与几何校正方法研究
摘要: 本文研究了利用无人机获取的两次飞行的图像数据进行配准与几何校正的方法。无人机航拍技术在地理信息获取和空间数据应用中具有重要意义,但由于飞行条件、摄影设备和环境等因素的影响,同一区域的不同飞行任务…
一分钟了解:光伏无人机测绘的优势
无人机测绘是以无人驾驶飞机作为空中平台,搭载高分辨率导航定位设备、激光扫描仪等设备获取数据信息,用计算机对图像信息进行处理,并按照一定精度要求制作成图像。光伏无人机测绘具有哪些优势?
1.高分辨率
在测绘行业中…

第六期丨酷雷曼无人机技能培训
第6期无人机技能提升培训
盼望着盼望着,第六期无人机技能提升培训会终于如期和大家见面了。
2024年1月1日,国务院、中央军事委员会颁布《无人驾驶航空器飞行管理暂行条例》,对民用无人机飞行活动实施更为严格的规范约束,越来越多…
ROS下控制无人机任任意方向下往机头方向飞行
引言:再一些比赛或者其他应用场景下,无人机需要程序设置按照机头方向正前方飞行。由于ROS下采用ENU坐标系,PX4采用NED坐标系,因此我们在写程序代码的时候,往往需要现根据角度和距离算出X,Y坐标位置才能让无人机到达准确…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
【无人机/平衡车/机器人】详解STM32+MPU6050姿态解算—卡尔曼滤波+四元数法+互补滤波——附3个算法源码
效果: MPU6050姿态解算-卡尔曼滤波四元数互补滤波 目录
基础知识详解
欧拉角
加速度计(Accelerometer)与姿态测量
陀螺仪(Gyroscope)与姿态测量
姿态解算算法1-互补滤波
姿态解算算法2-四元数法
姿态解算算法3-卡尔曼滤波
组成
1.预测状态方程
2. 预测协方…

实践航拍小目标检测,基于轻量级YOLOv8n开发构建无人机航拍场景下的小目标检测识别分析系统
关于无人机相关的场景在我们之前的博文也有一些比较早期的实践,感兴趣的话可以自行移步阅读即可:
《deepLabV3Plus实现无人机航拍目标分割识别系统》
《基于目标检测的无人机航拍场景下小目标检测实践》
《助力环保河道水质监测,基于yolov…

无人机技术,无人机动力系统知识,电机、电调、桨叶技术详解
无人机动力系统中的电机、电调和桨叶技术都是非常重要的部分,以下是对这些技术的详解:
无人机电机
在无人机动力系统中,电机是将电能转化为机械能的关键部件。其主要作用是产生旋转力矩,驱动螺旋桨的旋转,从而实现无…

低空经济20人|卓翼智能任雪峰:以技术驱动市场,引领无人机细分领域创新
作为国内系留无人机领域的领头羊企业,卓翼智能致力于提供智能无人系统解决方案。本期“低空经济20人”请到卓翼智能CEO任雪峰分享他对系留无人机研发应用的经验以及未来无人机行业生态发展的观点。 如今,无人机的应用场景逐渐广泛,在社会发展…
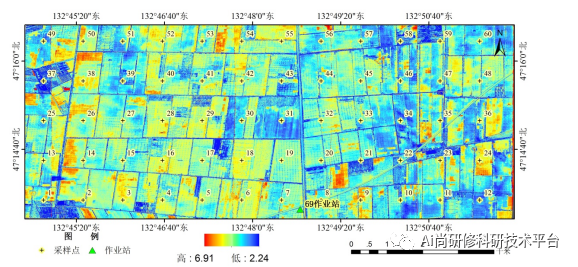
无人机遥感在农林信息提取中的实现方法与GIS融合应用
在新一轮互联网信息技术大发展的现今,无人机、大数据、人工智能、物联网等新兴技术在各行各业都处于大爆发的前夜。为了将人工智能方法引入农业生产领域。首先在种植、养护等生产作业环节,逐步摆脱人力依赖;在施肥灌溉环节构建智慧节能系统&a…
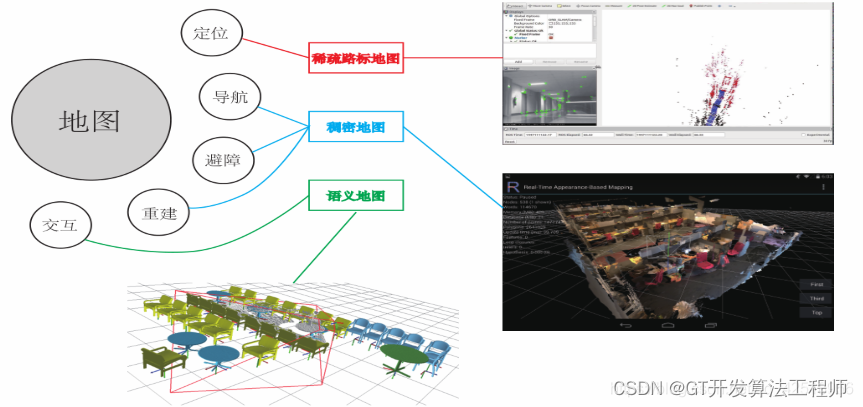
无人机自动返航算法实现与优化
一、引言 随着无人机技术的快速发展,其在航拍、农业、救援等领域的应用越来越广泛。在这些应用中,无人机的自动返航功能显得尤为重要。一旦无人机失去控制或与遥控器失去连接,自动返航算法能够确保无人机安全返回起飞点,避免损失和…
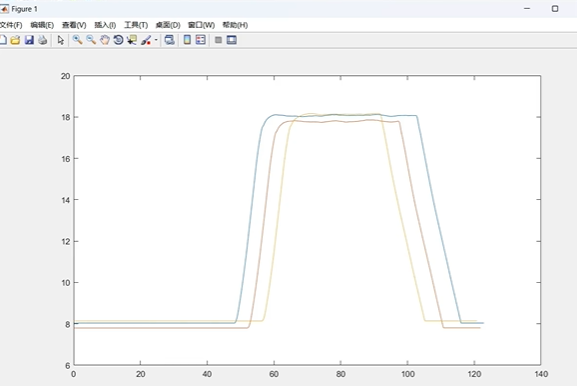
RflySim平台使用篇 | Coptersim系列教程(三)
# 导读 # CopterSim作为RflySim平台核心仿真软件,其主要实现两部分功能:模型和通信,掌握CopterSim使用方法即可轻松运行多旋翼运动动态模型,并连同其他软件构成软/硬件在环仿真。本篇教程将详细介绍coptersim仿真log数据获取。 Co…
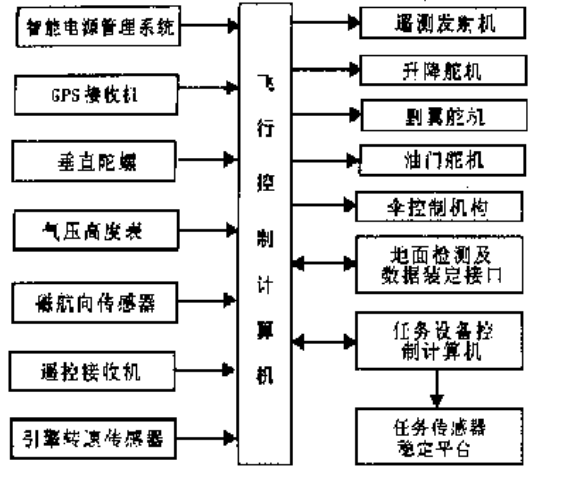
无人机遥感技术应用分析,无人机遥感系统测绘技术详解
由于无人机具有机动快速、使用成本低、维护操作简单等技术特点,因此被作为一种理想的飞行平台广泛应用于军事和民用各个领域。尤其是进入二十一世纪以后,许多国家将无人机系统的研究、开发、应用置于优先发展的地位,体积小、重量轻、探测精度高的新型传感器的不断问世,也使无人…
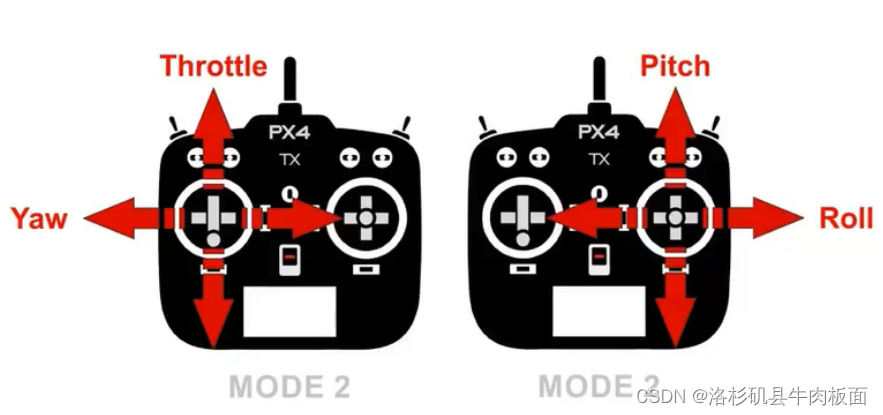
无人机/飞控--ArduPilot、PX4学习历程记录(1)
本篇博客用来记录个人学习记录,存放各种文章链接、视频链接、学习历程、实验过程和结果等等....
最近在整无人机项目,接触一下从来没有接触过的飞控...(听着就头晕),本人纯小白。
目录
PX4、Pixhawk、APM、ArduPilot、Dronecode
Dronekit…
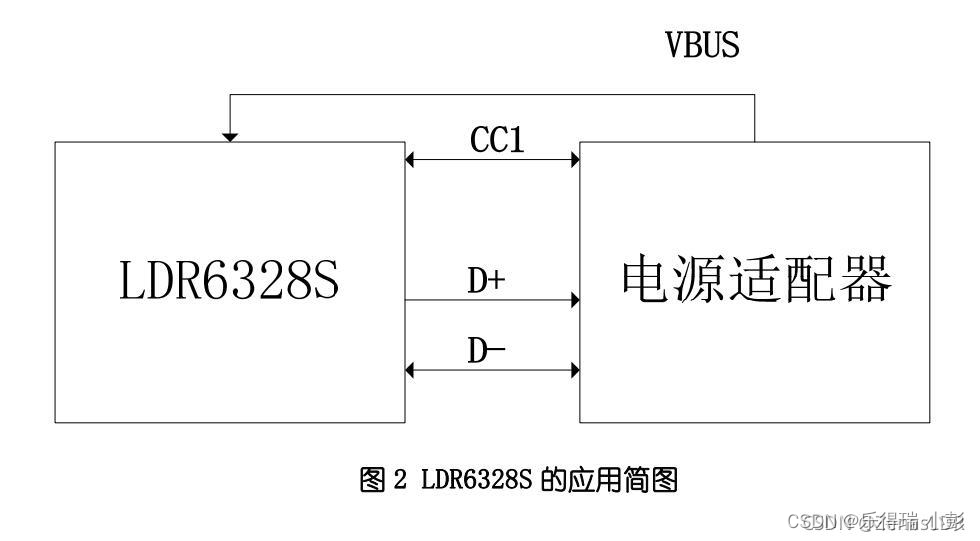
无线充,大功率小家电,智能家居,无人机快速充电等产品供电 LDR6328S芯片TYUPE-C PD诱骗电压 USB-C解决PD电源取电问题
LDR6328S 是乐得瑞科技有限公司开发的一款兼容 USB PD、QC 和 AFC 协议的 Sink 控制器。 LDR6328S 从支持 USB PD、QC 和 AFC 协议的适配器取电,然后供电给设备。比如可以配置适配器输 出需要的功率,给无线充电器设备供电。LDR6328S 也兼容传统 USB 电源…